7. Кинематическая настройка станков. Основ-ые передачи и механизмы кинематических цепей.
К-ая настройка станка – это комплекс организационно –подготовительных работ с целью подготовки станка для выполнения им технолог-их операций. Она представляет собой программирование скоростей его рабочих органов. Изменение величины передаточного отношения цепи позволяет изменять соотношение скоростей ее конечных звеньев. В станках с механич-ими связями для изменения перед. отношений используются специальные устройства в виде гитар сменных зубчатых колес, коробок скоростей и подач, ко-ые называются органами кинем-ой настройки цепей. Формулу настройки конкретного органа настройки определяют из уравнения кинематического баланса цепи, которое составляют по кинематической схеме.
Основ-ые передачи и механизмы кинематических цепей: 1. Передачи: для передачи движения от одного звена к другому служат: ременные (с плоским клиновым, поликлиновым и круглым ремнем; с зубьями ), цепные, зубчатые (цилиндрические с прямыми, косыми и шевронными зубьями; конические с прямыми и дуговыми зубьями; червячные), реечные (с зубчатым цилиндричеким колесом и червяком двух типов – скольжения и гидростатическим), винтовые (ее образует пара винт-гайка, которая может быть трех типов – скольжения, качения, гидростатическая) и др. передачи. Они делятся на передачи трения и зацепления. 2. Механизмы: 1) Механизмы изменения передаточных отношений (коробки скоростей и подач, в которых изменение их передаточных отношений осущ-ся за счет сменных зубчатых колес, передвижных колес или блоков зуб-ых колес, непередвигамых вдоль вала колес, но сцепляемых с ним при включении кулачковых, фрикционных или эелектромаг-ых муфт.) 3) Реверсивный механизм - для изменения напрвления движения 4) Суммирующие механизмы - для сложения движений (реечные, винтовые, червячные, планетарные зубчатые передачи) 5) Для сообщения исполнительным органам прямолинейного движения используют ряд передачи (реечные и винтовые) и механизмов (кривошипно-шатунные, кулисные, кулачковые).
6) Для осуществления периодических прерывистых и дозированных движений применяются кулачковые, мальтийские, храповые механизмы. 7) Муфты – для постоянного или периодического соединения и разъединения двух стыкующихся вращающихся валов. (постоянные, сцепные, предохранительные муфты) 8) Фиксирующие устройства – для фиксации узлов станка.9) Предохранительные устройства – для защиты от аварий. 10) беззазорные механизмы и передачи
8. Уравнение баланса и формула настройки. Составление общего уравнения кинематической цепи подачи и главного движения.
Для вывода формулы настройки на кинем-ой цепи имеется сменно зубчатые колеса. (а, б)
Уравнение продольной подачи:
![]()
(к – кол-во заходов)
Формула настройки:
Уравнение поперечной подачи:
1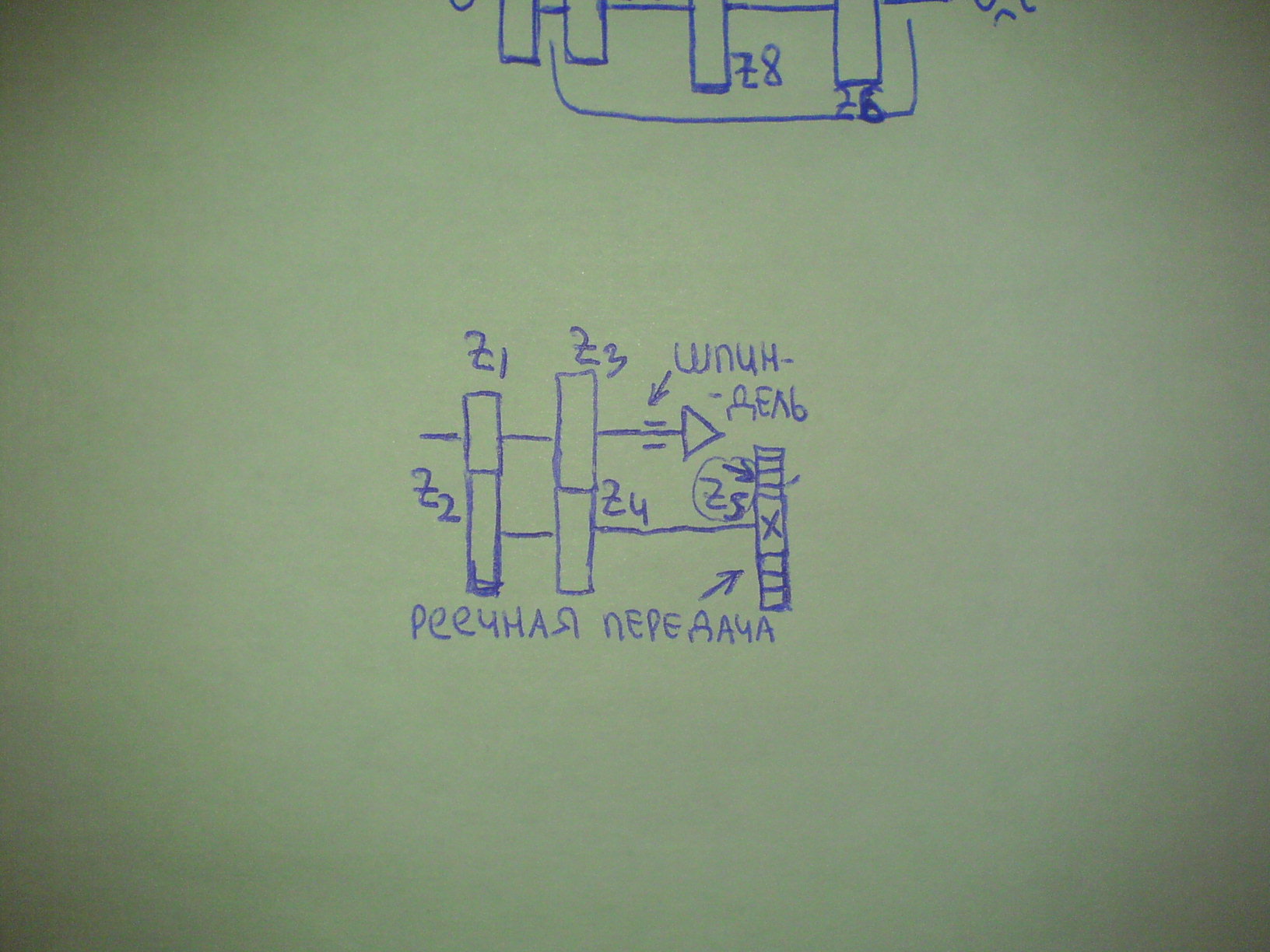 оборот шпинделя *
оборот шпинделя *
*![]()
У![]() равнение
главного движения:
равнение
главного движения:
![]()
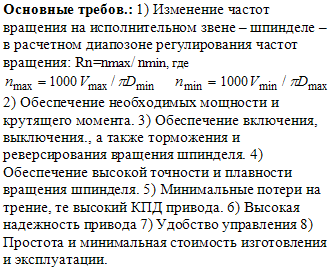
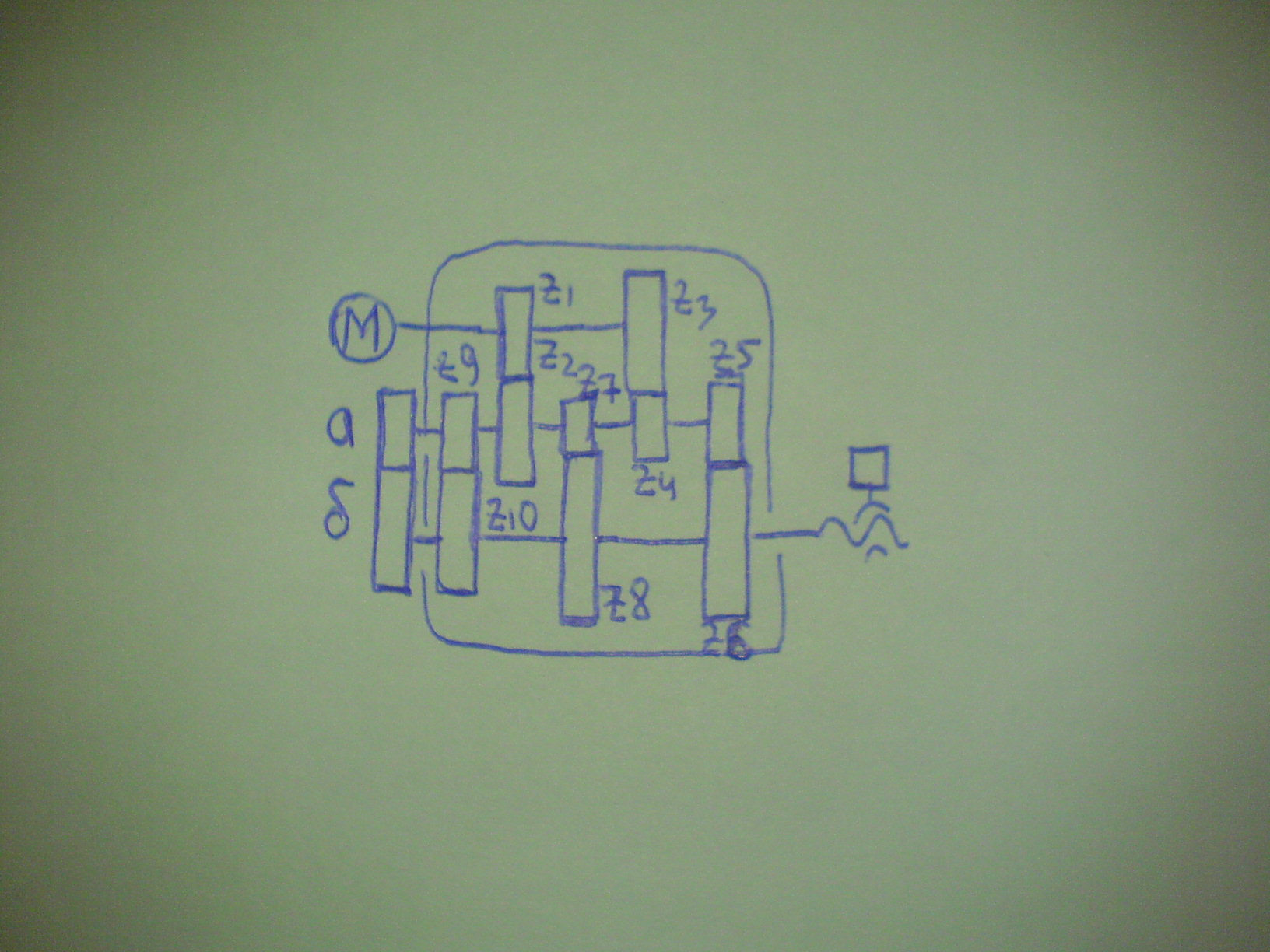
9. Привод главного движении. Основные требования к ним.
Главное движение
обеспечивает снятие стружки со скоростью
V.
Используются два вида главного движения
вращательное (токар., сверл., фрезер.,
шлиф. ) и прямолинейное (строгание,
долбление, протягивание) При вращательном
главном движении:
![]() При прямолинейном:
При прямолинейном:
![]() (L
– длина рабочего хода, К=Тр/Тх, Тр и Тх
– времена рабочего и холостого хода)
(L
– длина рабочего хода, К=Тр/Тх, Тр и Тх
– времена рабочего и холостого хода)