

1.1.2 Принцип действия адаптивного фильтра
Важнейшей
функцией выполняемой адаптивным
фильтром, является моделирование
системы. Это иллюстрируется на рис. 1.2,
где первичный сигнал с равномерной
спектральной плотностью подается
непосредственно либо на вход
![]() ,
либо на вход
,
либо на вход
![]() адаптивного
фильтра. Первичный сигнал поступает на
вход системы с импульсной характеристикой
адаптивного
фильтра. Первичный сигнал поступает на
вход системы с импульсной характеристикой
![]() ,
выход системы соединен со вторым входом
адаптивного фильтра. Для получения
оптимальных весовых векторов
,
выход системы соединен со вторым входом
адаптивного фильтра. Для получения
оптимальных весовых векторов
![]() адаптивного
фильтра можно применить два разных
подхода, которые приведут к совершенно
различным результатам. Это имеет место
в следующих случаях:
адаптивного
фильтра можно применить два разных
подхода, которые приведут к совершенно
различным результатам. Это имеет место
в следующих случаях:
Яндекс.ДиректВсе
объявления
![]() Шкафы
металлические, произв. РБ
Шкафы гардеробные, для документов,
вещей и сумок, оружия!
Адрес и телефон ekom.by
Шкафы
металлические, произв. РБ
Шкафы гардеробные, для документов,
вещей и сумок, оружия!
Адрес и телефон ekom.by
![]() Шкафы
металлические в РБ Шкафы
металлические покупают на Stroyka.by.
Каталог актуальных продавцов stroyka.by
Шкафы
металлические в РБ Шкафы
металлические покупают на Stroyka.by.
Каталог актуальных продавцов stroyka.by
1. Неизвестная система подключена ко входу адаптивного фильтра (рис. 1.2а). В этом случае оптимальная импульсная характеристика адаптивного фильтра является точной моделью соответствующей характеристики системы ;
2. Неизвестная система подключена ко входу адаптивного фильтра (рис.1.2, б). В этом случае оптимальная импульсная характеристика адаптивного фильтра является функцией, обратной соответствующей характеристике неизвестной системы.
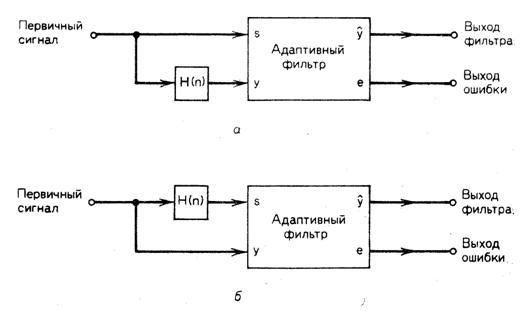
Рис.
1.2 применение адаптивного фильтра для
прямого моделирования системы:
![]() (а)
и обратного моделирования системы: (б).
(а)
и обратного моделирования системы: (б).
Практическим примером, иллюстрирующим работу адаптивного фильтра первого типа (т. е. прямое моделирование системы), является подавление отраженного сигнала в гибридной телефонной линии, рассматриваемое в гл. 8.
Примером, которым можно воспользоваться для иллюстрации принципа действия адаптивного фильтра, моделирующего обратную характеристику системы, является коррекция искажений при передаче данных по телефонным линиям. В этом случае вход телефонной линии возбуждается известным сигналом, а искаженный сигнал с выхода линии поступает на вход адаптивного фильтра. Затем фильтр перестраивается с помощью подачи на вход последовательной серии известных (неискаженных) первичных сигналов. Адаптивный фильтр моделирует импульсную характеристику, обратную характеристике линии, для получения на выходе отфильтрованных (свободных от искажений) данных, что описано в гл. 8.
Следующая область применения адаптивных фильтров – подавление шумов [291]. В этой схеме первичный сигнал, содержащий искомую информацию, наряду с мешающим сигналом, приложен ко входу . Затем от другого источника, не содержащего никаких составляющих искомого сигнала, поступает независимый коррелированный сигнал – образец мешающего сигнала. Если этот коррелированный сигнал поступает непосредственно на вход адаптивного фильтра, фильтр формирует импульсную характеристику, обеспечивающую получение выходного сигнала , который когерентно вычитает из нежелательную составляющую, оставляя на выходе лишь искомый сигнал.
Одним из примеров использования этого метода является регистрация сердцебиения плода [339]. Первичный сигнал поступает от преобразователя, расположенного на поверхности живота матери. Этот преобразователь вырабатывает сигнал, содержащий импульсы сердечных сокращений плода, которые, однако, существенно маскируются сердцебиением матери. Затем от второго преобразователя, расположенного на груди матери, получают вторичный сигнал, регистрирующий только сердцебиение матери. Далее адаптивный фильтр моделирует тракт искажений от преобразователя, расположенного на груди, до преобразователя, расположенного на животе, для получения сигнала, который когерентно вычитается из сигнала с поверхности живота. Адаптивные фильтры применяются и в других случаях, например, для устранения шума двигателя в микрофоне пилота в кабине самолета [18] или для подавления акустических шумов окружающей среды, например, на крупных электростанциях.
Еще
одно применение адаптивных фильтров —
это реализация самонастраивающегося
фильтра, используемого для выделения
синусоиды, маскируемой широкополосным
шумом. Такое применение в адаптивном
лилейном усилителе (АЛУ) [346] осуществляется
путем подачи сигнала непосредственно
на вход фильтра
![]() и
подачи модификации сигнала с временной
задержкой на вход фильтра
и
подачи модификации сигнала с временной
задержкой на вход фильтра
![]() .
В том случае, если задержка превышает
величину, обратную ширине полосы
пропускания фильтра, шумовые составляющие
на двух входах не будут коррелированны,
а синусоидальные составляющие будут
коррелированы. Адаптивный фильтр
дает на выходе синусоиду с увеличенным
отношением сигнал-шум, тогда как на
выходе сигнала ошибки синусоидальные
составляющие уменьшаются. Эти и другие
примеры применений адаптивных фильтров
обсуждаются в гл. 8 и 9.
.
В том случае, если задержка превышает
величину, обратную ширине полосы
пропускания фильтра, шумовые составляющие
на двух входах не будут коррелированны,
а синусоидальные составляющие будут
коррелированы. Адаптивный фильтр
дает на выходе синусоиду с увеличенным
отношением сигнал-шум, тогда как на
выходе сигнала ошибки синусоидальные
составляющие уменьшаются. Эти и другие
примеры применений адаптивных фильтров
обсуждаются в гл. 8 и 9.