

4.6. Определение знака первого интервала.
Во
всех рассмотренных примерах первый
интервал произвольно выбирался
положительным. Очевидно, что знак
первого интервала надо выбирать, исходя
из начальных и конечных условий. Если
начальные условия нулевые, то знак
первого интервала определяется знаком
заданной координаты. Иначе говоря, если
задана координата
![]() ,
то управление следует начинать с
положительного интервала, если задана
координата
,
то управление следует начинать с
положительного интервала, если задана
координата
![]() ,
то с отрицательного интервала. При
ненулевых начальных условиях знак
первого интервала выбирается из
следующих соотношений:
,
то с отрицательного интервала. При
ненулевых начальных условиях знак
первого интервала выбирается из
следующих соотношений:
при
![]() первый интервал положительный;
первый интервал положительный;
при
![]() первый интервал отрицательный.
первый интервал отрицательный.
Данные соотношения справедливы только при равенстве нулю всех производных в начальный и конечный моменты управления, т. е. тогда, когда начальная и конечная точки фазовых траекторий лежат на оси х или на линии установившихся состояний.
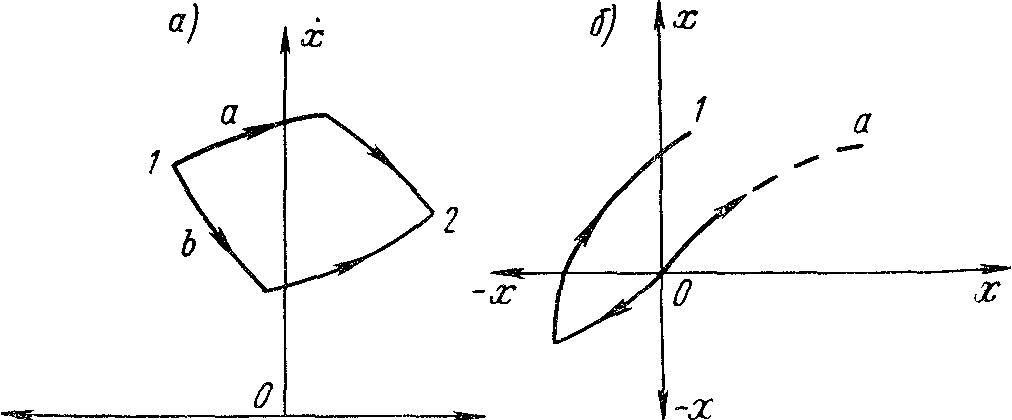
Рис.4.18. Определение знака первого интервала
Несколько сложнее определить знак первого интервала, когда начальные и конечные точки фазовых траекторий лежат в фазовом пространстве. На рис.4.18, а показана фазовая плоскость, где даны две точки: начальная 1 и конечная 2. Из точки 1 в точку 2 можно попасть по двум траекториям - a или b. Для движения по траектории а управление следует начинать с положительного интервала, а по траектории b - с отрицательного. Однако чем выше лежит фазовая траектория, тем быстрее протекает процесс. Поэтому время движения по траектории а будет меньшим, чем по траектории b. Естественно, что процесс, характеризующийся траекторией а, будет оптимальным. В данном простом случае легко определить знак первого интервала. В более сложных случаях, когда трудно изобразить фазовые траектории, приходится рассчитывать алгоритмы оптимального управления для положительного и отрицательного первого интервала. Алгоритм управления, дающий меньшее время, и будет оптимальным.
Рассмотрим еще случай, показанный на рис.4.18, б. По фазовой траектории а, соответствующей максимально допустимому положительному управляющему воздействию, попасть в точку 1 из начала координат нельзя. Однако если сдвинуть фазовую траекторию влево первым отрицательным интервалом, то можно достичь точки 1. При затруднениях в получении фазовых траекторий нужно проделать расчет для двух алгоритмов управления: с положительным и отрицательным первым интервалом.
В примере (см. рис.4.18, б) функция оптимального управления для первого положительного интервала вообще не имеет решения, т. е. не существует алгоритма управления, начинающегося с положительного интервала при данном ограничении и данных граничных условиях. Следовательно, необходимость выбора знака первого интервала в некоторых случаях может усложнить получение оптимального алгоритма управления.
При рассмотрении оптимальных систем были использованы простые примеры, в которых порядок дифференциальных уравнений не превышал двух. Естественно, что трудоемкость расчетов с повышением порядка дифференциальных уравнений сильно возрастает. В таких случаях желательно применять цифровую вычислительную машину. С ее помощью можно решать системы трансцендентных уравнений, определяющих функцию оптимального управления. Для расчетов оптимальных управлений были предложены блок-схемы вычислений на цифровой машине, одна из которых показана на рис. 4.19. Заметим, что вводить данные в ЦВМ нужно в цифровой форме; при этом результаты вычислений получаются также в цифровой форме. Для непосредственного управления это не совсем удобно, так как требует преобразования непрерывных величин в цифровые и наоборот.
Рассмотренные
вопросы оптимального управления
предполагали реализацию алгоритмов
разомкнутыми системами. В таких системах
не контролируется вектор состояния
и предполагается, что он точно
соответствует ожидаемому результату.
Такие системы могут применяться только
в идеальных случаях, т. е. когда отсутствует
вектор возмущающих воздействий
![]() ,
не меняются коэффициенты дифференциальных
уравнений и структура объекта управления.
В реальных системах трудно соблюсти
все эти условия, а, следовательно, и
осуществить оптимальное управление в
разомкнутой системе.
,
не меняются коэффициенты дифференциальных
уравнений и структура объекта управления.
В реальных системах трудно соблюсти
все эти условия, а, следовательно, и
осуществить оптимальное управление в
разомкнутой системе.
При жестком алгоритме управления, т.е. при постоянных моментах переключения и действии возмущающих факторов, объект будет попадать в заданную точку фазового пространства с избытком или недостатком внутренней энергии. Это приведет к тому, что после управления вектор состояния сможет совершать свободные движения, удаляясь при этом от заданной точки. Если величина отклонений вектора от заданной точки укладывается в заданную точность при действии возмущающих факторов, то применить для оптимального управления разомкнутую систему возможно. Однако для этого следует проанализировать все возможные возмущающие факторы и ошибки, которые они могут вызвать. Так как многие возмущающие факторы, т.е. составляющие вектора , часто не известны, то и провести такой анализ нельзя. Реализация алгоритмов управления в разомкнутых системах не так проста, как это кажется на первый взгляд. Особенно она усложняется для реверсивных объектов и объектов, которые требуют изменения моментов переключения.
Синтез оптимальных алгоритмов и анализ изменения координат по изложенной методике лучше всего проводить на стадии проектирования, выбирая, допустим, наиболее целесообразный агрегат или технологическую схему. Очень полезно проделать расчеты оптимального управления для выяснения возможностей объекта управления, даже если он и не автоматизируется.
Учитывая недостатки, которые присущи разомкнутым оптимальным системам, их можно рекомендовать только в сугубо специальных случаях, допустим тогда, когда нельзя получить информацию вектора состояния .
![]()
![]()
![]()
![]()
Рис.4.19. Блок-схема определения моментов переключения с помощью цифровой вычислительной машины.