

Внешний вид комбинированного привода фирмы liebherr для управления спойлерами самолёта а380.
Здесь приняты обозначения: 1 – компенсатор; 2 – гидроцилиндр; 3 - блок клапанов; 4 – блок электроники; 5 – насос и электродвигатель
Как и в рулевых приводах с объемным регулированием для электрогидростатических приводов существуют проблемы с отводом тепла, т.к. данный привод скомпонован в объеме достаточно закрытом для окружающей среды, в котором возможности для рассеивания тепла невелики, а потери энергии при управлении приводят к интенсивному нагреву. Поэтому при применении электрогидростатического привода особенно важно обеспечить малые энергетические потери.
На проблеме обеспечения требуемой динамической чувствительности электрогидростатического привода следует остановиться особо. Трудности достижения приемлемой чувствительности привода и точности отработки им малых сигналов, напрямую связанные с достигнутым качеством регулирования скорости вращения БДПТ в области малых скоростей. Особенно заметны эти трудности при выполнении требований к частотным характеристикам в области малых сигналов при амплитуде 0,1…0,2% от максимального хода поршня. В области малых сигналов и, следовательно, малой скорости вращения ротора насоса возникает зона нечувствительности (зона неустойчивых скоростей). В сочетании с трудностью обеспечения устойчивой скорости вращения ротора электродвигателя при малых управляющих сигналах этот недостаток может быть очень существенным. Нижний предел устойчивой скорости вращения вала электродвигателя определяет зону нечувствительности привода. Чем выше нижний предел устойчивой скорости вращения вала двигателя, тем больше зона нечувствительности привода в целом.
Тем не менее, электрогидростатические приводы являются реальным техническим решением, обеспечивающим в настоящее время возможность сокращения количества централизованных гидросистем самолета, а наличие у них слабых сторон стимулирует разработку новых схем и конструкций таких приводов.
На предприятии ОАО «ПМЗ Восход» разработан ряд вариантов приводов, являющихся дальнейшим развитием схемы электрогидростатического привода. Схема одного из разработанных вариантов автономного электрогидростатического привода, выполненного совместно специалистами МАИ и ОАО «ПМЗ Восход» приведена на рис.8.12. Этот привод содержит электронные блоки микровычислителя и силового инвертора, которые обеспечивают работу бесколлекторного электродвигателя постоянного тока БДПТ. В гидравлической части привода используется нереверсивный нерегулируемый насос, золотниковый клапан реверса КР, управляемый линейным электродвигателем ЛЭД, гидроцилиндр и вспомогательные элементы: гидрокомпенсатор (ВГК), клапаны подпитки (ОК) и предохранительные клапаны (ПК), электрический датчик положения золотника клапана реверса, электрические датчики перепада давления (ДПД) на входе и выходе клапана реверса. Привод замкнут позиционной обратной связью с помощью датчика положения штока гидроцилиндра.
Этот привод обладает существенной особенностью в регулировании скорости движения поршня: Способ регулирования скорости выходного звена меняется в зависимости от величины сигнала рассогласования следящего привода. Поэтому такой электрогидростатический привод можно назвать приводом с комбинированным регулированием скорости внутри одного энергетического канала.
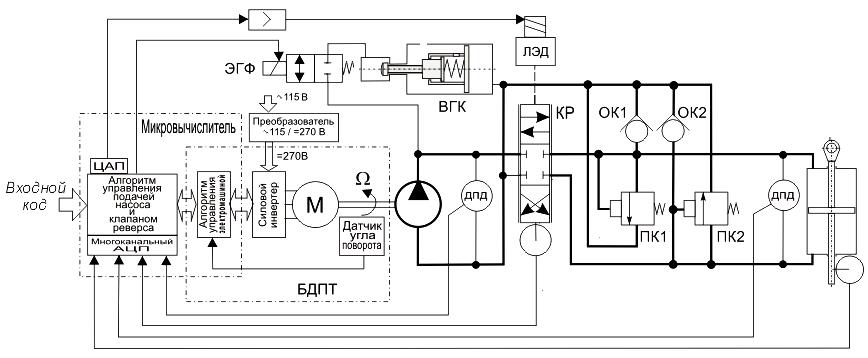
Рис. 8.12.
Схема автономного электрогидравлического привода с гидростатической передачей и нереверсивным электродвигателем.
Представленный на этом рисунке привод обеспечивает комбинированное регулирование скорости (общее объёмное регулирование и дроссельное регулирование в области малых сигналов). На рисунке приняты следующие основные обозначения: КР – клапан реверса; ПК1, ПК2 –предохранительные клапаны; ЭГФ – электромагнитный клапан включения компенсатора; ВГК – управляемый гидрокомпенсатор; ЛЭД – линейный электродвигатель; ДПД – датчик перепада давления.
Комбинированное регулирование скорости выходного звена привода обеспечивает отработку больших и средних сигналов рассогласования привода с малыми потерями мощности, близкими к минимальным потерям при объемном принципе регулирования скоростью поршня. При малых сигналах рассогласования, при которых потребляемая приводом мощность мала и энергетические показатели не столь важны, привод переходит в режим дроссельного регулирования, для которого характерны максимальная чувствительность и минимальные ошибки воспроизведения заданного движения. При таком управлении не требуется обеспечение стабильной низкой скорости вращения ротора электродвигателя в области малых сигналов. Поэтому можно использовать в приводе более простые и дешевые электродвигатели, а также нереверсивные насосы, что снижает стоимость их изготовления.
Гидравлическая часть привода не просто выполняет функции редуктора, а полностью реализует весь накопленный авиационной гидроавтоматикой потенциал для улучшения характеристик привода в области обеспечения линейных и стабильных характеристик в области малых сигналов. Это свойство привода особенно ценно для применения на самолётах, обладающих малоустойчивой или неустойчивой аэродинамической компоновкой.
Поскольку динамическая жесткость привода зависит от модуля упругости жидкости в камерах гидроцилиндра, который в свою очередь, зависит от уровня давления в полостях гидроцилиндра, то жесткость гидроцилиндра может быть увеличена за счет увеличения минимального давления. Таким образом, электрогидростатический привод с комбинированным регулированием скорости, показанный на рис.8.12, позволяет уменьшить трудности с обеспечением высокой чувствительности и динамических характеристик. При этом динамические характеристики привода в области малых сигналов существенно улучшаются. В нижеследующей таблице представлены сравнительные данные по амплитудным и фазовым искажениям, вносимым приводом при отработке гармоических сигналов, т.е. по частотным характеристикам различных вариантов рулевых приводов [8.7, 8.21]:
Привод спойлеров самолёта А-380 фирмы LIEBHER |
Привод ОАО «ПМЗ Восход» с комбинированным управлением скоростью выходного звена. (частота – амплитуда – фаза) |
|
Режим дроссельного управления (частота – амплитуда – фаза) |
Режим с гидростатическим управлением (частота – амплитуда – фаза) |
|
1 Гц – 0,2 дБ, 21 град |
1 Гц – 0,6 дБ, 33 град |
1 Гц – 0,1 дБ, 18 град |
2 Гц – 0,2 дБ, 43 град |
2 Гц – 2,2 дБ, 62 град |
2 Гц – 0,1 дБ, 40 град |
4 Гц – 0,6 дБ, 90 град |
4 Гц – 6,1 дБ, 135 град |
4 Гц – 1,0 дБ, 75 град |
8 Гц – 6,0 дБ, 164 град |
8 Гц – 11,0 дБ, 168 град |
8 Гц – 6,0 дБ, 120 град |
Таким образом, можно утверждать, что сохранение в электрогидростатических рулевых приводах в области малых сигналов возможности дроссельного регулирования скоростью поршня есть положительная особенность привода, который показан на рис. 8.12.