

1. Как изменится режим работы двигателя постоянного тока при витковом замыкании в обмотке возбуждения?
При витковом замыкании в обмотке возбуждения двигателя постоянного тока произойдет затруднённый пуск и падение оборотов под нагрузкой, вплоть до полной остановки. Ну и естественно сильный нагрев за короткое время. А если двигатель к тому же и коллекторный - то выгорание сегментов коллектора.
2. В исполнительном двигателе постоянного тока с номинальными данными: Pн, Вт; Uн, В; I, А; Rас, Ом; nн, об/мин – произошло кратковременное увеличение нагрузки в 2 раза. Как это отразится на частоте вращения якоря?

3. Трехфазный асинхронный двигатель имеет следующие параметры: Pн, Вт; Uн, В; Iн, А; f1, Гц; р; sн, %. Определите номинальный момент двигателя.

 4.
Чем отличается сельсин-датчик от
сельсина-приемника? Можно ли использовать
датчик в качестве приемника и наоборот?
4.
Чем отличается сельсин-датчик от
сельсина-приемника? Можно ли использовать
датчик в качестве приемника и наоборот?
Простейший сельсин состоит из статора с трёхфазной обмоткой (схема включения — треугольник или звезда) и ротора с однофазной обмоткой. Два таких устройства электрически соединяются друг с другом одноимёнными выводами — статор со статором и ротор с ротором. На роторы подаётся одинаковое переменное напряжение. При таких условиях вращение ротора одного сельсина вызывает поворот ротора другого сельсина. При повороте одного из сельсинов (сельсин-датчика) на определённый угол в нём наводится ЭДС, отличная от первоначальной. Поскольку сельсины (их роторы) соединены, то эта же ЭДС будет возникать и во втором сельсине (сельсин-приёмнике) и по правилу левой руки он отклонится от первоначального положения на тот же угол. Исходя из схемы можно сказать что конструктивно СД и СП ничем не отличаются и их можно менять местами.
5. Как осуществляется реверс исполнительных двигателей постоянного тока?
Для того чтобы изменить направление вращения (выполнить реверс) нужно поменять знак электромагнитного момента на противоположный. Это возможно осуществить двумя способами:
1. Изменением направления тока якоря.
2. Изменением направления магнитного потока, т.е. тока возбуждения.
Практически это делается изменением полярности напряжения, подаваемого на обмотки.
6. Определите номинальный момент двигателя постоянного тока по паспортным данным: Uн, В; Iан, А; Iвн, А; nн, об/мин; Rас, Ом.

7. Объясните, можно ли исполнительный асинхронный двигатель использовать в качестве силового?
Можно, но это не выгодно. Недостаток – низкий КПД и повышенные потери мощности. Можно использовать только в микродвигателях, для которых КПД не имеет решающего значения
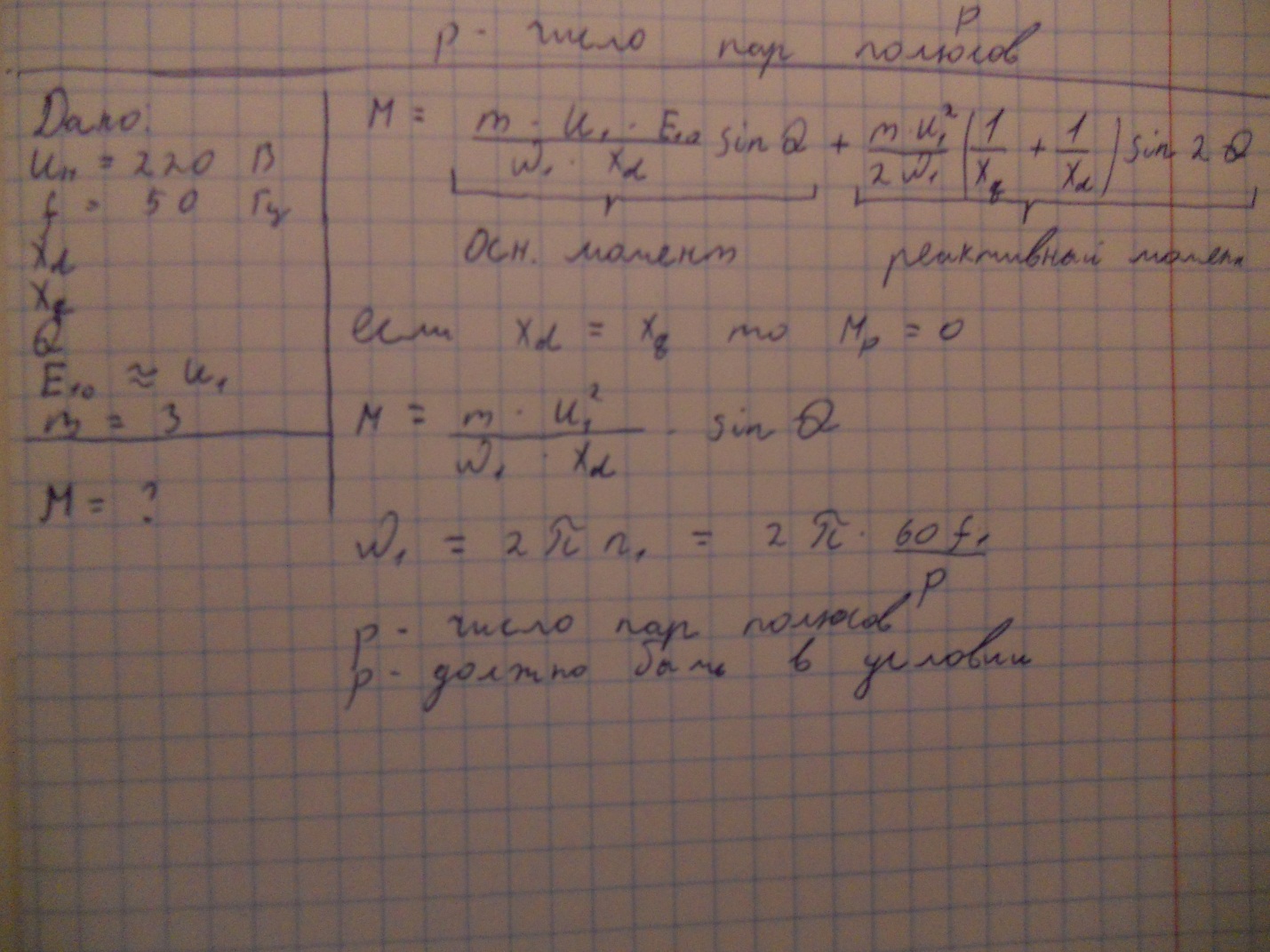
8. Определите электромагнитный момент трехфазной неявнополюсной синхронной машины при питании от сети 220 В, 50 Гц, если известны Xd, Ом; Xq, Ом; Θ,˚. Принять Е10 ≈ U1.
9.С какой целью в цепь якорной обмотки двигателя постоянного тока включается регулируемое сопротивление. Включая регулируемое сопротивление в цепь якорной обмотки мы получаем возможность регулировать напряжение на якоре, а это значит что мы можем регулировать одну из механических координат(скорость или момента). Обычно рассматривают регулирование одной координаты (M или ω), считая другую постоянной. Чаще всего используют для регулирования частоты вращения
10. Определите максимальную механическую мощность и соответствующую ей частоту вращения исполнительного двигателя постоянного тока в номинальном режиме при следующих данных: Pн, Вт; Uн, В; Iан, А; nн, об/мин; Rас, Ом.

11. Определите номинальное скольжение конденсаторного АД, имеющего следующие паспортные данные: Рн, Вт; Мн, Нм; U1, В; f1, Гц; р.

12. Что изменится в работе индикаторной системы сельсинов, если поменять местами провода, присоединенные к обмотке возбуждения приемника?
Между сельсином датчиком и сельсином приёмником появится угловой сдвиг на 180 градусов.
13. Чем отличаются магнитные цепи тахогенератора постоянного тока и исполнительного двигателя?
Достоинства ТГ постоянного тока: малые габариты и масса при большей выходной мощности, отсутствие фазовой погрешности. В магнитоэлектрическом ТГ не требуется источник питания для возбуждения.
Недостатки: сложность конструкции, повышенная стоимость, нестабильность выходной характеристики из-за наличия скользящего контакта, пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока щетками.
Достоинства ДПТ: по сравнению с ИД переменного тока они имеют практически прямолинейные механические и регулировочные характеристики, более простые способы управления, меньшие габариты и массу, широкий диапазон регулирования частоты вращения, большой пусковой момент, малую мощность управления, высокое быстродействие, в них отсутствует самоход.
Недостатки: наличие скользящего контакта между щетками и коллектором, являющегося источником радиопомех, малый срок службы щеточно-коллекторного узла
Тахогенераторы постоянного тока Выполняют с постоянными магнитами на статоре или с электромагнитным независимым возбуждением. В них используют якорь обычной конструкции, полый якорь или дисковый с печатной обмоткой.
В качестве исполнительных двигателей (ИД) постоянного тока применяют двигатели с электромагнитным независимым возбуждением и возбуждением постоянными магнитами.
14. Определите частоту вращения при амплитудном управлении в режиме холостого хода асинхронного исполнительного двигателя, имеющего следующие данные: Pн, в; nн, об/мин; Uн, в; Iун, а; f1, Гц; p; э.
![]()
![]()
В режиме х.х.
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
15. Что изменится в работе индикаторной системы сельсинов, если поменять местами пару проводов, присоединенных к обмотке синхронизации приемника?
Стрелка на сильсине-приёмнике будет двигаться в противоположную сторону.
16. Объясните, почему изменяется ток при пуске двигателя постоянного тока.
Ток в цепи якоря описывается уравнением: .
В помент пуска Еа=0, и ток якорь максимален.
Когда двигатель якорь обороты, в нём
наводиться Еа, которая и уменьшает
ток.
17. Как изменятся свойства
асинхронного исполнительного двигателя,
если полый ротор выполнить не из алюминия,
а из меди?
.
В помент пуска Еа=0, и ток якорь максимален.
Когда двигатель якорь обороты, в нём
наводиться Еа, которая и уменьшает
ток.
17. Как изменятся свойства
асинхронного исполнительного двигателя,
если полый ротор выполнить не из алюминия,
а из меди?
Получим более нелинейные характеристики. Возможно возникновение самохода. Сопротивление ротора уменьшится, что приведёт к увеличению КПД. Поскольку медь тяжелее алюминия, то увеличиться момент инерции, что приведёт к уменьшенгию быстродействия.
18. Определите вращающий момент конденсаторного синхронного двигателя с постоянными магнитами при следующих данных: U1, В; f1, Гц; Xd, Ом; Xq, Ом; Θ,˚. Принять Е10 ≈ U1.
19. Определите частоту вращения двигателя постоянного тока с моментом нагрузки, равным двойному номинальному, по известным паспортным данным: Pн, Вт; Uн, В; Iан, А; nн, об/мин; Rас, Ом.
Решение
CeФ=U-Ia*Ra
Mн=9,55* (Pн / nн)
P=0,105*M*n
nн= (Uн / CeФ) – ((Iан* Rас) / CeФ)
n – частота вращения
n=(Uн / CeФ) – ((2*Iан* Rас) / CeФ) – ответ
20. Объясните, почему изменяется ток при пуске АД.
При включении рубильника в первый момент
скольжение s = l, а приведенный
ток в роторе и равный ему ток
статора ,максимальны.
По мере разгона ротора скольжение
уменьшается и поэтому в конце пуска ток
значительно меньше, чем в первый момент.
В серийных двигателях при прямом пуске
кратность пускового тока kI =
IП / I1НОМ = ( 5,…,7), причем
большее значение относится к двигателям
большей мощности.
,максимальны.
По мере разгона ротора скольжение
уменьшается и поэтому в конце пуска ток
значительно меньше, чем в первый момент.
В серийных двигателях при прямом пуске
кратность пускового тока kI =
IП / I1НОМ = ( 5,…,7), причем
большее значение относится к двигателям
большей мощности.
21. Определите максимум механической мощности исполнительного АД при следующих данных: Рн, Вт; nн, об/мин; f1, Гц; р; α.
Решение
Т.к. не указано управление, то используем самое легкое, а именно фазо-амплитудное управление
P2max=αэ2 / 2*(1+ αэ2)
P2= P2max / Pkmax
Pkmax=0,105*Mk*n1
n1=(60*f) / p
mn=Mn / Mk
Mn=9,55* (Pн / nн)
mn= αэ – ((1+ αэ2)*νн) / 2 νн – ню
νн= nн / n1
потом находим Mk, потом Pkmax.
22. Объясните, чем отличается согласованное положение роторов датчика и приемника в трансформаторной системе сельсинов по отношению к индикаторной системе?
Согласованным положением сельсинов в трансформаторной системе синхронной связи называется такое положение роторов, при котором выходное напряжение приемника Uвых равно нулю. В отличие от согласованного положения сельсинов в индикаторной системе в этом случае поворот ротора сельсина-приемника составляет 90°. Вследствие этого за начало отсчета углов в сельсине-приемнике принимается точка на оси, перпендикулярной оси однофазной выходной обмотки (см. рис. 6.14). Сельсин-приемник в трансформаторной системе синхронной связи самостоятельно не отрабатывает заданный датчиком угол αд, а лишь вырабатывает ЭДС выходной обмотки, изменяющуюся по закону синуса в зависимости от угла рассогласования θ. Отработка заданного датчиком угла - поворот ротора сельсина-приемника на угол αп = αд - осуществляется с помощью исполнительного двигателя.


Продольные составляющие МДС роторов датчика Fдd и приемника Fпd создают в обмотках возбуждения компенсационные токи (аналогично трансформатору), МДС которых компенсирует действие МДС Fдd и Fпd . Поперечные составляющиеFдq и Fпq , оставшиеся нескомпенсированными, взаимодействуют с потоком статора, создавая в датчике и приемнике синхронизирующие моменты, которые в датчике и приемнике направлены в различные стороны и стремятся повернуть оба ротора в согласованное положение.\