

16. Принципы формирования выходного управляющего воздействия фаззи-регулятора.

Процедуру формирования управляющего воздействия, выполняемую в 3 этапа, поясним на примере действия двух правил:
![]()
На этапе фаззификации вх.переменные преобрауются в соотв. термы. Для вариантов ФП треугольной формы, когда левое ai и правое bi – граничные значения ФП совпадают с центром
ci-1 предыдущей ФП и с центром ci+1 последующей ФП, мат описание ФП имеет вид:
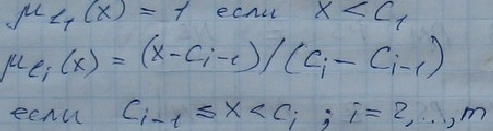
где m – число термов переменной x
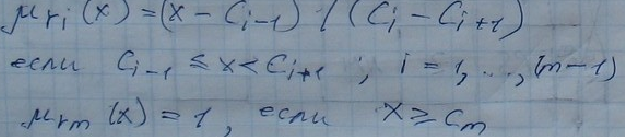
l – левая сторона, v – правая сторона ФП
Для рассматриваемого примера значения x1 = ξ1 и x2 = ξ2, измеренные в некоторый момент времени, определяют следующие значения ФП:
Для термов A12, A22 для правила 1:
µ12=0.7; µ22=0.4;
Для термов А11, А22 для правила 2
µ11=0.3; µ22=0.4;
На этапе логического заключения вых.термам переменной y присваиваются значения ФП вх.переменных с общим условием:
µ(y)≤ µ(x), и конкретно с оператором И и согласно принципу минимума:
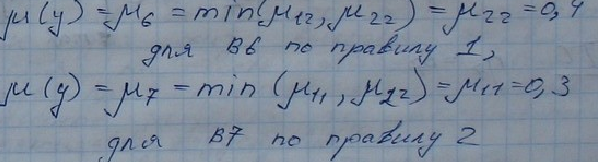
В результате входные термы B6=PM и B7=PB оказываются усеченными мин. значениями вх. ФП. Полученные по двух активизированным правилам термы B6 и B7 объеденяются по принципу максимума (оператора ИЛИ) в один общий терм: B=B6 V B7.
Т.о. на этапе логического заключения происходит преобразование входных термов в выходные с передачей от входа к выходу значений ФП по принципу минимума-максимума.
1. Общая характеристика свойств САУ как объекта проектирования
1-Гетерогенность-физическая разнородность устройств и элементов, входящих в САУ.
2-Непрерывный динамический процесс их функционирования.
3-Многокритериальность условий их применения и работоспособности, при этом многие критерии противоречивы
4-Неопределенность задаваемых параметров и возмущающих воздействий, определяемая наличием не только внешних, но и внутренних «шумов», нестационарностью во времени параметров устройств САУ.
5-Внедрение микропроцессоров или управляющих ЦВМ в САУ.
6-Наличие нескольких контуров управления, многомерность САУ.
Эти основные свойства диктуют требования к проектированию и производству САУ как специфического класса технических систем. Серийное производство САУ является длительным дорогостоящим и весьма трудоемким процессом.
2. Путь САУ от заказа до внедрения
Заказчик и проектировщик при разработке ТЗ должны убедится в существовании решения задач проектирования – сходимости спирали проектирования к проекту при заданных условиях и ограничениях.
Предварительный вариант ТЗ составляется проектировщиком и согласуется с заказчиком по каждому пункту. Часто по отдельным пунктам ТЗ возникают конфликтные ситуации, которые затягивают процесс согласования. В принципе требования и ограничения при проектировании противоречат друг другу, поэтому спроектировать идеальную САУ невозможно. Наилучший реальный проект тот, в котором наиболее эффективно найден компромисс.
В результате согласования появляется ТЗ как официальный документ, который содержит десятки листов текста, выполняется по ГОСТ и утверждается заказчиком и проектировщиком.
ТЗ на САУ в целом порождает множество т.н. частных ТЗ на отдельные устройства САУ и их элементы. Эти ТЗ согласуются между самими проектировщиками внутри проектного предприятия. Здесь так же разумеется возникают конфликтные ситуации и процесс согласования ТЗ повторяется, но на более низком уровне.
0-Согласование ТЗ
1-Техническое предложение
2-аванпроект
3-этап эскизного проектирования
4-этап рабочего проектирования
5-этап испытаний (лабораторные->заводские->межведомственные->натурные->регламентные)
6-готовый проект
9. Формализация связей в Control System
Функции соединения LTI-моделей:
1) parallel-параллельное соединение (сложение LTI-моделей)
2) series-последовательное соединение (умножение LTI-моделей)
3) feedback – соединение с ОС
4) append – объединение LTI-моделей с добавлением входом и выходов
5) connect – объединение моделей с использованием матрицы соединений
6) star – объединение взаимосвязанных многомерных моделей
параллель. соединение LTI-моделей
sys=parallel(sys1,sys2)sys – эквивалентно sys=sys1+sys2
посл. соединение LTI-моделей
sys=series(sys1,sys2)sys – эквивалентно
sys= sys1*sys2
соединение LTI-моделей с ОС
sys=feedback(sys1,sys2)sys1=feedback(sys1,sys2,sign), замкнутая модель sys имеет вх. и выход, обе LTI-модели должны быть непрерывными или дискретными с одинаковыми передаточными….Чтобы замкнуть систему ПОС исп след.: sys=feedback(sys1,sys2,+1)
объединение LTI-моделей
sys-append(sys1,sys2….sysN)
Модели sys1,sys2 итд до sysN находятся в рабочей области matlab как самост. модель. Функция append объединяет эти модели и формирует многомерную модель.
построение LTI-моделей на основе структурной схемы:
sys=connect(sys,Q,inputs,outputs)
Предварительно применена функция append для формирования блочной диагональной модели sys без учета перекрестных связей, затем с использованием функции connect формируется SS-модель в пространстве состояний с учетом соеденения блоков, Q-матрица связей, предн. для описания связей и блоков на структурной схеме; любая строка этой матрицы соответствует одному входу (первый элемент строки – номер входа, последние элементы – номер выходов, которые алгебраически суммируются по этому входу;
“-“элемент означает суммирование со знаком минус.
Например, если на вход подаются сигналы с выходов 2,6,15, причем сигнал с выхода 15 имеет отрицательный знак, то соотв. строка матрицы Q имеет вид [7 2 -15, 6].
Векторы inputs и outputs определяют какие вх. и вых. агригир-й системы являются внешними.