

17. Привод подачи. Требования, структура, диапазон регулирования.
Привод подачи реализует второе формообразующее движение, а также движение позиционирования и быстрых холостых ходов
Требования: должен иметь минимальные зазоры, высокую жесткость; обеспечивать плавность перемещения при малых скоростях и высокую скорость вспомогательных перемещений; обладать малым временем разгона и торможения, небольшими силами трения, уменьшенным нагревом его элементов, большим диапазоном регулирования.
По структуре приводы подач делятся на разомкнутые и замкнутые. Приводы состоят из двигателя, редуктора, силовой передачи винт- гайки, датчика обратной связи и т. д. В качестве двигателей подачи применяют: электрогидравлические шаговые двигатели вращающего и поступательного движения; высокомоментные электродвигатели постоянного тока с постоянными магнитами и с тиристорным управлением.
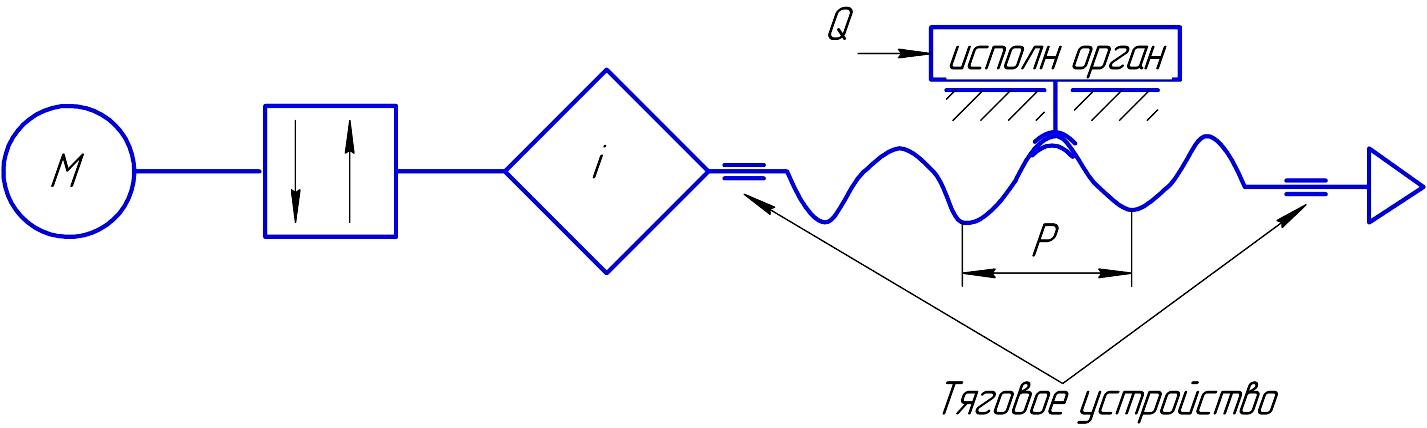
В кинематической схеме привода подач движ-t от эл двигателя, через редуктор i, передается на ходовой винт и далее на исполн орган станка.
Параметры кинематической цепи i, p определяются диапазоном регулирования передачи и возможностями эл двигателя.
D1=Vmax/Vpmin, D2=Vpmax/Vpmin,
D=D1 D2
D2
При управлении током цепи якоря ДПТ скорость вращения регулируется, при T=const
D1’=wном/wmin – T=const;D2’=wmax/wnom=2…2,5
D’= D1’ D2’
D’> D
Возможно
2 способа вписывания диапазона привода
(D)
в диапазон д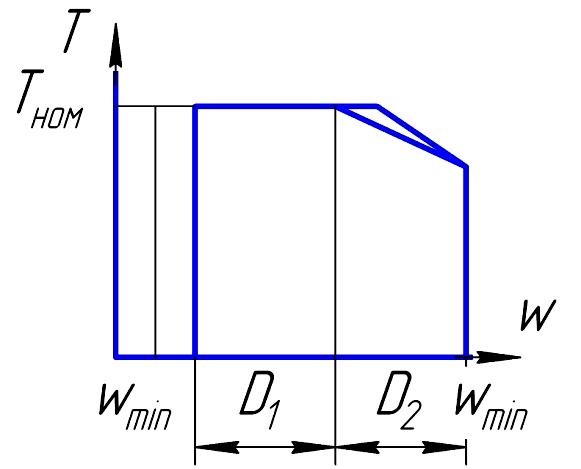
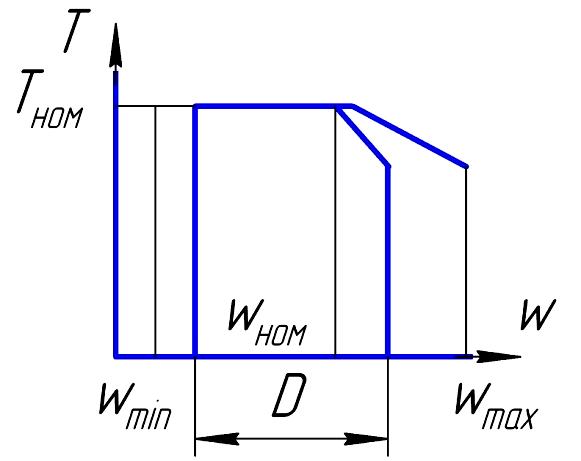 вигателя(D’)
вигателя(D’)
Соединение проводим по верхней границе диапазона, т.к. на малых v имеется пульсация крутящего момента.
I= nmax p/Vmax
Где nmax – макс частота вращения двигателя, Vmax – макс скорость вспомаг перемещений, p – шаг Х.В., в мм
Для высокомоментных двигателей приравниваем i=1, определяем p и соединяем вал двигателя через муфту с Х.В.
18. Тяговые устройства привода подач. Назначение, виды.
ТУ служат для перемещения подвижных органов станка по направляющим прямолин или вращ движения.
Требования к ТУ:
- Обеспечить заданный з-н перемещения
- Иметь высокий КПД
- обладать высокой жесткостью
- иметь малый момент инерции
- Обеспечивать малые перемещения по пути и скорости
- Быть беззазорными
- обладать высокой износостойкостью
Для прямолинейного перемещения используются: механизмы( х.в./гайка, з.к./рейка, червяк/рейка, кулачковые, шатунные, рычажные), гидро-пневмо двигатели (цилиндр/поршень), электромагнитные устройства (линейные эл. двигатели, бесконтактные электромагнитные передачи, соленоиды, магнитные жидкости)
Для вращательного движения используются зубчатые, червячные, ременные, цепные, фрикционные и др передачи.
19. Пара винт-гайка скольжения: характеристика, конструкция, материалы, методика расчета.
-малый шаг
- высокая редукция
-
малый крутящий момент

Q- тяговая сила (Н);P- шаг винта (м);η- КПД винта

β- угол подьема виттовой линии резьбы на среднем диаметре
ρ- 3..110 угол трения в резьбе

μ-
коэф трения

Достоинства
- самоторможение
-возможность применения для установочных перемещений под нагрузкой и надежной фиксации в вертикальном направлении
Недостатки
- низки КПД;изнашивание в следствии смещенного трения
Материал винта должен иметь высокую поверхностную твердость
-40ХФА;18ХГТ
Применяют азотирование на глубину h=0,5 мм, закалка HRC 53..58, высоко углеродистые стали
-8ХФ; ХВГ;У10А
HRC 50…60
Для неответственных винтов сталь 45, 50.
Гайки для ходовых винтов:
-БрОФ10-0,5
-БрОЦС 6-6-3
Неответственные передачи: антифрикционный чугун.
Возможны биметаллические гайки, стали, бронза.
Резьба ходовых винтов стандартная трапецеидальная.
Прорезные станки α=10..200
Для повышения точности применяют центрирующие втулки. Регулирование зазора осуществляется 2-мя полугайками.
Длинные ходовые винты L=600-1500мм диаметры 20..60мм в тяжелых станках до 200мм.
Проверочный расчет передачи на износостойкость по среднему давлению на рабочей поверхности резьбы.

l- длинна гайки
z- число заходов