

7.Оптимизация графиков частот. Сложенные и исправленные структуры
Условие оптимизации структур:



Ограничения при построении графиков и структурных сеток. Для прямозубых колес
1/4 ;
;

 =2/(1/4)=8
=2/(1/4)=8
коробка |
Вид предачи |
|
||||||
1,06 |
1,12 |
1,25 |
1,41 |
1,58 |
1,78 |
2,0 |
||
Скор. |
+m |
12 |
6 |
3 |
2 |
1 |
1 |
1 |
-m |
24 |
16 |
6 |
4 |
3 |
2 |
2 |
|
подач |
+m |
18 |
9 |
4 |
3 |
2 |
1 |
1 |
-m |
27 |
14 |
7 |
4 |
3 |
3 |
2 |
|
 при
𝝋
при
𝝋П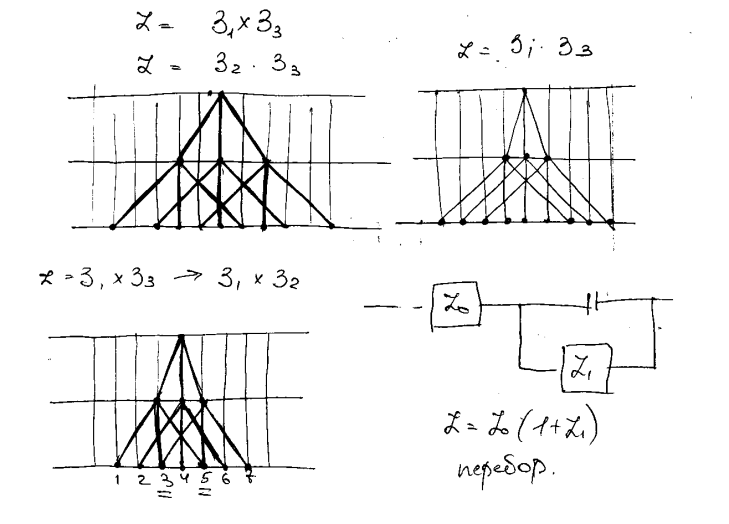 о
структурной формуле и приведенным
правилам строятся нормальные структуры
без наложений и пропусков частот. Иногда
хар-ки групп изменяют с учетом огранич.
Приведенных в табл. И получают исправленные
структуры.
о
структурной формуле и приведенным
правилам строятся нормальные структуры
без наложений и пропусков частот. Иногда
хар-ки групп изменяют с учетом огранич.
Приведенных в табл. И получают исправленные
структуры.
Z= Для
расширения диапазона Rn:
Z=
Для
расширения диапазона Rn:
Z=

8. Привод с бесступенчатым и смешанным регулированием
1)Механическое регулирование примен. в виде фрикционных вариаторов


2)Электрическое регулирование – часть использ. ДПТ с тиристорным управлением. Оснащаются станки с ЧПУ и многооперационными станками.
ЧПУ+ИМ=М0
Для ДПТ с тиристорным управлением диапазон регулирования с постоянной мощностью Rэр=3…6<Rпр.
Применяются также асинхронные частотнорегулировающие двигатели:
n=(60f /P)(1-S); f=0.5…200Гц; P=0.4…110 кВТ; Цена: 300…10000$
Т.к. Rэр<Rпр. примен. комбинированное регулирование добавляя к ДПТ степенчатую механическую коробку
Rn=Rэ∙Rм
Число
ступеней механической коробки Zк lg
Rпр/
lg
Rэр
lg
Rпр/
lg
Rэр
Rпр=
Rэр∙Rм=
Задано:
 =40
мин-1;
=40
мин-1;
 =2400
мин-1;
Rn=2400/40=60;
=2400
мин-1;
Rn=2400/40=60;
 =156=160;
=156=160;
 =15
=15
Двигатель из каталога: nном=1000 мин-1; nmax=3000 мин-1; Rnэ=3000/1000=3;
nmin=1 мин-1; Zк lg Rпр/ lg Rэр= lg 15/ lg 3 =2,47 → 3
Г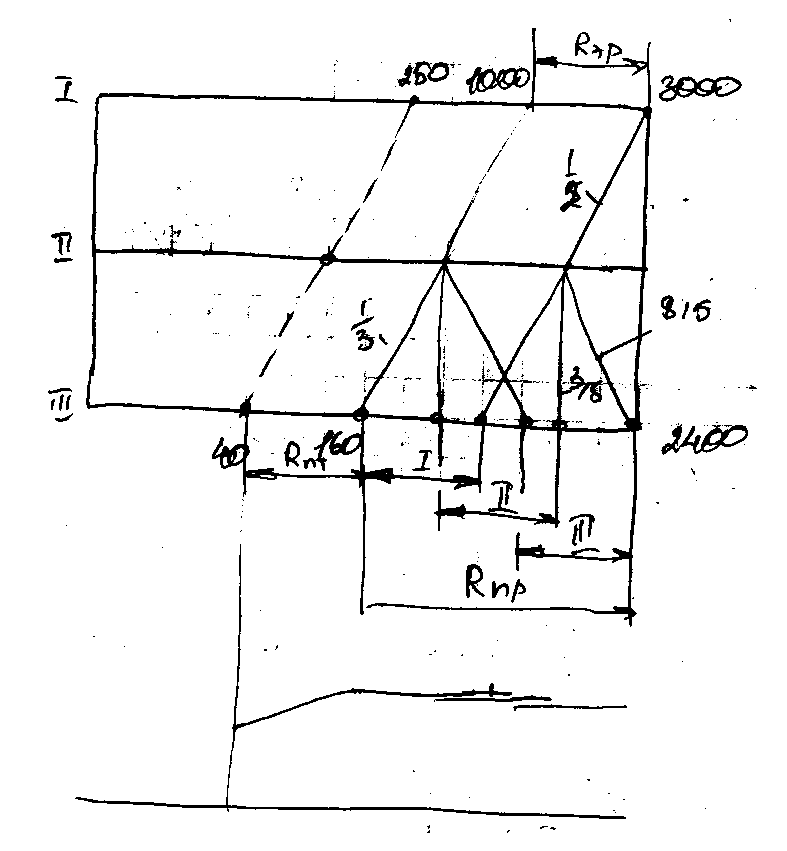 рафик
частот комбинированного регулирования:
рафик
частот комбинированного регулирования:
Перекрытие частот возникает из-за округления в большую сторону. Для упрощения и удешевления механической части можно применить Zk=2.
+ бусстепенч. приводов:
-повыш. производительности за счет точной установки оптимальной скорости
- простота автоматизации переключения частот и стыковка с ЧПУ
- возмож-ть плавного измен-я скорости во время работы
9. Особенности проектирования и расчета привода главного движения
Приводы ПГД различают по:
Виду двигателя
Способу переключения частот и регулировки
Компановки
1)Перспективы безрядукторные электромеханические узлы ротор-шпиндель
2)Ручное преключение для универсальных станков общего назначения:
Селентивное однорукояточное
Преселективные системы переключения (примен. в крупных станках)
Автоматическое переключение –на основе элктромуфт
3) Компановки приводов главного движения весьма разнообразны:
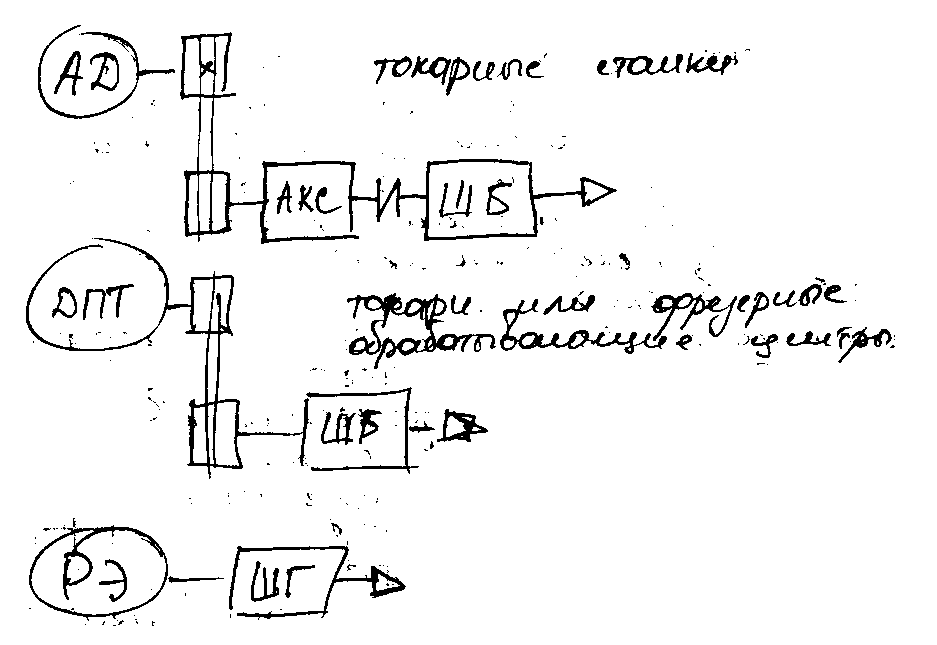
Компоновка привода главного движения определяется общей компоновкой станка, связанной с его служебным назначением и типоразмером, а также связями между отдельными элементами привода: двигателем, коробкой скоростей и шпиндельной бабкой. При раздельном приводе механическая часть состоит из двух узлов: коробки скоростей (редуктора) и шпиндельной бабки, соединяемых ременной передачей. Иногда в шпиндельную бабку помещают переборную группу. Для удобства надевания ремней применяют консольное расположение шкива на конце шпинделя. Следует учитывать, что в этом случае вибрации, возникающие в коробке скоростей, а также выделяющаяся в ней теплота влияют на положение шпинделя и на точность его вращения.
