

1.Этапы проектирования станочного оборудования.
Этапы проектирования : -техническое задание -предпроектная проработка
ТЗ содержит: сведение о назначении станка, обоснование целесообразности проектирования нового оборудования, анализ патентных источников, экологическое обоснование, основные технико экономические показатели станка.
Последовательность этапов проектирования:
1.Уточнение служебного назначения
2.определение технических характеристик
3.разработка кинематической схемы
4.выбор компоновки
5.конструирование узлов станка
6.рабочие чертежи деталей и спецификации
7.технологическая подготовка производства.
8.изготовление и испытание опытного образца.
9.выпуск серии
1,2-техническое предложение,1-4-эскизный проект,1-5-технический проект,1-6-рабочий проект.
Приветствуется применение агрегатно-модульного принципа проектирования на базе вычислительной техники.
2.Проектные критерии и проектные ограничения.
Цель проектирования станков-обеспечение обработки заданного множеством деталей на основе принятой технологии с минимальными затратами.
Обеспечение годового выпуска деталей при минимальных затратах –целевая функция,принимаемая при проектировании комплекта станков.
 N-годовой
выпуск деталей в штуках
N-годовой
выпуск деталей в штуках
 -приведённые
затраты,руб.
-приведённые
затраты,руб.
 ,Ф-текущие
затраты,Р-капитальные затраты,К-
нормативный коэффициент эффективности
,Ф-текущие
затраты,Р-капитальные затраты,К-
нормативный коэффициент эффективности
При реконструировании отдельных станков из комплекта на 1-м плане производительность
 T-среднее
время обработки 1-й детали на станке.
T-среднее
время обработки 1-й детали на станке.
При выборе проекта сравнивается варианты по значению целевой ф-ии,при обеспечении показателей проектных ограничений.
Проектные ограничения связаны:
1.абсолютная стоимость проекта.
2.функциональные требования-обеспечение точности обработки.
3.характеристика станкостроительного производства(металоёмкость,набор технологич. операций)
4.условия эксплуатации(гарантирован.срок сохранения точности и долговечности,удобство взаимодействия)
5.особое проектное ограничение(полная патентная чистота)
3.Предпосылки автоматизации проектирования станков.Структура сапр станочного оборудования.
Процесс проектирования-совокупность процедур переработки информации.Проект-информационный аналог реального технического объекта.Процедуры переработки делятся на:-формальные,-недоформальные.
1.Большой объём формальных процедур сбора инф-ии,типовые расчёты,разработка конструкторской докум-ии.
2.объединение формальных и неформальных процедур в диалоговых системах проектирования.
3.возможность внесения изменений в проект на любой стадии проектирования,без ограничения объёма.
4.возможность хранения,переработки огромного объёма справочной информации.
Принципы построения САПР станков:
1.Диалоговый характер.
2.Комплексный подход к автоматизации всех уровней проектирования и изготовления.
3.Возможность совершенствования САПР
4.Информационная согласованность частей САПР.
4. Привод главного движения. Требования. Выбор мощности электродвигателя.
Привод главного движения – привод станка сообщающий инструменту и заготовке необходимые скорости и передает силу требуемую для осуществления технологического процесса. Привод главного движения - Dv Привод подач - Ds
Для привода главного движения специфические требования о передаче силы, постоянстве скорости и ее регулировке, быстродействию, надежности, стоимости и габаритам. Тенденции конструирования: применяются в станках модульно компл. Регулирования электропривода для всех движений. Упрощается стыковка с ЧПУ и автоматизация.
Исходные данные для проектирования привода главного движения:
1 диапазон регулирования частоты вращения Rn
2 мощность привода P
 ;
; ;
; ;
; ;
;

При увеличении Rn и P увеличивается эффективность станка но растет стоимость. Оптимизируются Rn и Р по критерию минимума приведенных затрат с учетом конкретных технологических режимов.
Выбор мощности электродвигателя
Мощность
двигателя

 ,
кВТ
,
кВТ

P1 – постоянные потери холостого хода (определяется по эмпирическим формулам); Р2 – дополнительные потери при резании; Рz=(10..15%)Pд
Для передачи полной мощности Рд=РЭ/n, n-общий КПД привода.

 ,
для приводов гл. движения n=0,75,,,0,85
,
для приводов гл. движения n=0,75,,,0,85
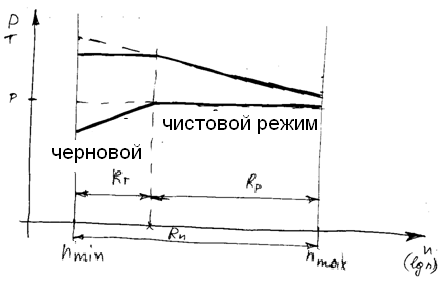
Для станков с повторно-кратковременной нагрузкой: сверлильные, токарно-револьверные принимают Рд=Рэ .В общем случае при обработке с различными v и Fz для главного привода желательно обеспечить постоянство передаваемой мощности Р по всему диапазону Rn
В
этом случае максимальное
Т будет при nmin
что приведет к увеличению габаритов и
стоимости. По статистике в нижней трети
диапазона полная мощность не используется.
В станкостроении принято для станков
общего назначения до условной частоты
.
 Регулирование ведется до np
с постоянным моментом Тconst
а выше с постоянной мощностью Pconst
Регулирование ведется до np
с постоянным моментом Тconst
а выше с постоянной мощностью Pconst
Rn=RT*RP. Для современных универсальных станков Rn=10…200