

1)Кинематика поступательного движения. Системы отсчёта. Траектория, длина пути, перемещение. Скорость и ускорение, средняя и мгновенная скорость. Нормальное, тангенсальное, полное ускорение.
Кинематика – изучает движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время.
Поступательное движение — это механическое движение системы точек (тела), при котором любой отрезок прямой, связанный с движущимся телом, форма и размеры которого во время движения не меняются, остается параллельным своему положению в любой предыдущий момент времени.
Материальная точка – тело, размерами которого можно пренебречь в условиях данной задачи.
Траектория – линия, которая описывает тело или материальная точка во время движения.
Путь – расстояние, которое проходит тело, двигаясь по траектории.
Перемещение – кратчайший путь.
Скорость - векторная физическая величина, характеризующая быстроту перемещения и направления движения материальной точки в пространстве относительно выбранной системы отсчёта (например, угловая скорость). Этим же словом может называться скалярная величина, точнее модуль производной радиус-вектора.
Мгновенная скорость – первая производная пути по времени.
Мгновенная скорость – касательная к данной точке.
![]()
Ускоренье - производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
![]()
![]()
![]()
Ускорение точки при движении по окружности
Вектор
ускорения![]() при движении точки по окружности можно
разложить на два слагаемых (компоненты):
при движении точки по окружности можно
разложить на два слагаемых (компоненты):
![]()
Тангенциальное
ускорение —
![]() направлено
по касательной к траектории. Является
составляющей вектора ускорения a.
Характеризует изменение скорости по
модулю, соноправлено по вектору со
скоростью.
направлено
по касательной к траектории. Является
составляющей вектора ускорения a.
Характеризует изменение скорости по
модулю, соноправлено по вектору со
скоростью.
![]() ,
,

Центростремительное
или Нормальное
ускорение
![]() —
возникает (не равно нулю) всегда при
движении точки по окружности (конечного
радиуса. Является составляющей вектора
ускорения a,
перпендикулярной вектору мгновенной
скорости. Вектор нормального ускорения
всегда направлен к центру окружности,
а модуль равен:
—
возникает (не равно нулю) всегда при
движении точки по окружности (конечного
радиуса. Является составляющей вектора
ускорения a,
перпендикулярной вектору мгновенной
скорости. Вектор нормального ускорения
всегда направлен к центру окружности,
а модуль равен:
![]()
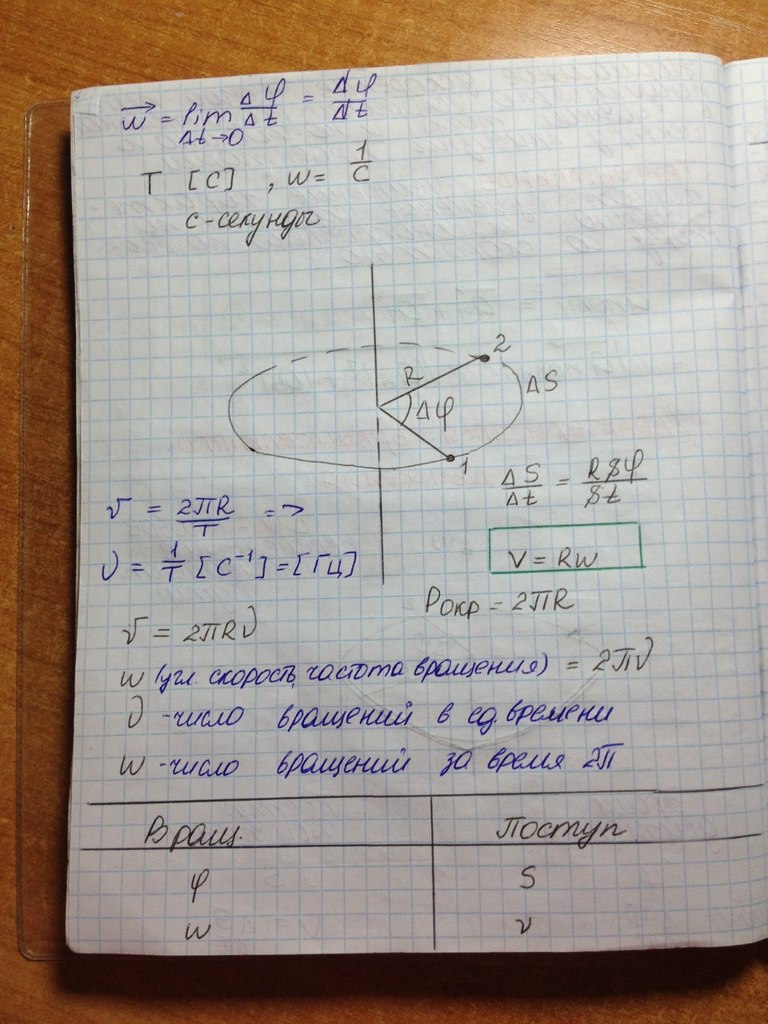
2)Кинематические характеристики вращательного движения вокруг неподвижной оси: угловая скорость, угловое ускорение. Связь кинематических величин для поступательного и вращательного движения.
Вращательно движение – движение, при котором все точки тела совершают движение по концентрической окружности, центры корой лежат на одной прямой, называемой осью вращения.
Угловая скорость— векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
, (1)

Обратим внимание на то, что, в то время как сам угол поворота φ является скаляром, бесконечно малый поворот dφ — векторная величина, направление которой определяется по правилу правой руки, или буравчика, и связано с осью вращения. Если вращение является равномерным, то ω=const и точка на окружности поворачивается на равные углы вокруг оси вращения за равные времена. Время, за которое она совершает полный оборот, т.е. поворачивается на угол 2π, называется периодом движения Т. Выражение (1) можно проинтегрировать в пределах от нуля до Т и получить угловую частоту
![]() .
(2)
.
(2)
Число оборотов в единицу времени есть величина, обратная периоду, — циклическая частота вращения
ν =1/T. (3)
Нетрудно получить связь между угловой и линейной скоростью точки. При движении по окружности элемент дуги связан с бесконечно малым поворотом соотношением dS = R·dφ. Подставив его в (1), находим
v = ωr. (4)
Формула (4) связывает величины угловой и линейной скоростей. Соотношение, связывающее векторы ω и v, следует из рис. А именно, вектор линейной скорости представляет собой векторное произведение вектора угловой скорости и радиуса-вектора точки r:
![]() .
(5)
.
(5)
Таким образом, вектор угловой скорости направлен по оси вращения точки и определяется по правилу правой руки или буравчика.
Угловое ускорение— псевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
При
вращении
тела вокруг неподвижной оси,
угловое ускорение по модулю равно:

Вектор
углового ускорения
![]() направлен
вдоль оси вращения (в сторону
направлен
вдоль оси вращения (в сторону
![]() при
ускоренном вращении и противоположно
—
при замедленном).
при
ускоренном вращении и противоположно
—
при замедленном).
При
вращении вокруг неподвижной точки
вектор углового ускорения определяется
как первая производная от вектора
угловой скорости
![]() по
времени[2],
то есть
по
времени[2],
то есть![]() и
направлен по касательной к годографу
вектора
в соответствующей его точке.
и
направлен по касательной к годографу
вектора
в соответствующей его точке.
Связь,
между линейным ускореньем и угловым:

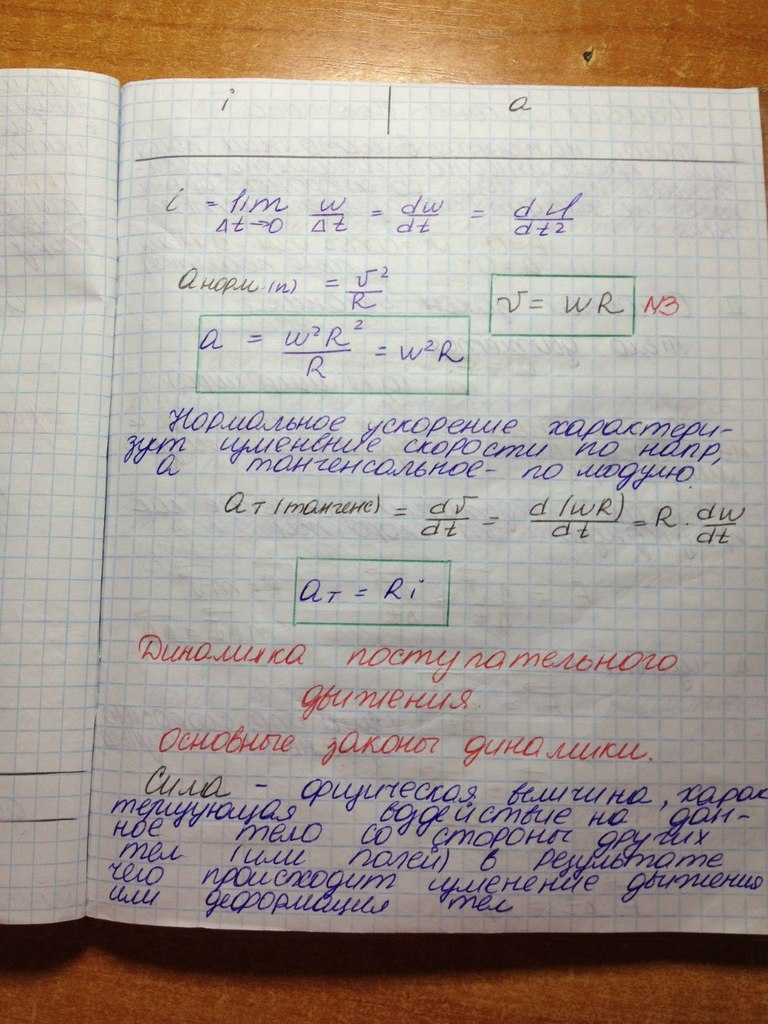
3)Динамика поступательного движения. Законы Ньютона: (Савельев И. В. Т1 § 7,9,11). Основные физические величины и их размерности: (Савельев И. В. Т1 § 10). Виды сил в механике (Савельев И. В. Т1 § 13-16)
Классическая динамика основана на трёх основных законах Ньютона:
1-й: Существуют такие системы отсчета, относительно которых поступательно движущееся тело сохраняет свою скорость постоянной, если на него не действуют другие тела или их действие скомпенсировано.
![]()
2-й: В инерциальной системе отсчета сумма всех сил, действующих на тело, равна произведению массы этого тела на векторное ускорение этого же тела (действие на тело силы, проявляется в сообщении ему ускорения).
![]()
![]()
В наиболее общем случае, который описывает также движение тела с изменяющейся массой (например, реактивное движение), 2-й закон Ньютона принято записывать следующим образом:
![]() ,
,
где
![]() —
импульс
тела. Таким образом, сила характеризует
быстроту изменения импульса.
—
импульс
тела. Таким образом, сила характеризует
быстроту изменения импульса.
3-й: Тела действуют друг на друга силами равными по модулю и противоположными по направлению
![]()
![]()
Если при этом рассматриваются взаимодействующие материальные точки, то обе эти силы действуют вдоль прямой, их соединяющей. Это приводит к тому, что суммарный момент импульса системы состоящей из двух материальных точек в процессе взаимодействия остается неизменным. Таким образом, из второго и третьего законов Ньютона могут быть получены законы сохранения импульса и момента импульса.
Сила - физическая величина, характеризующая воздействие на данное тело со стороны других тел (или полей), в результате чего происходит изменение движения или деформации тел.
Масса - количественная мера инертности тела. Чем более инертно тело, тем больше его масса.
Инертность тела – способность тела сопротивляться внешнему воздействию.
Свойства возникающих сил:
Силы всегда возникают попарно.
Возникающие силы всегда одной природы.
Силы никогда не уравновешиваются, т. к. приложены к разным телам.
Виды сил в механике:
Силы тяготения (гравитационного взаимодействия):


G – сила гравитационного взаимодействия.
Сила тяжести (всегда направлена вертикально вниз).
Fт=mg

R – радиус Земли.
Сила упругости

K – коэффициент упругости или жесткости. Зависит от формы и размеров материала.
Х – деформация.
Сила сопротивления среды.

r- коэффициент сопротивления сферы. Зависит от свойств среды, в частности плотности.
v - скорость. «-» означает, что сила и скорость направлены в противоположные стороны.
Сила трения.

N - сила нормального давления. Сила реакции опоры. Направлена всегда перпендикулярно поверхности.
M – коэффициент трения. Всегда меньше единицы, зависит от материала и состояния трущихся поверхностей.
Механическая система тел – группа тел, выделенных для рассмотрения.
Внутренние силы – силы, с которыми тела и системы взаимодействуют друг с другом.
Внешние силы- обусловлены воздействием на систему тел, не принадлежащих данной системе.
Замкнутая система – система, в которой отсутствует действие внешних сил.