

Искусственные нейронные сети
Основные проблемы, решаемые искусственными нейронными сетями
Искусственные нейронные сети (ИНС) строятся по принципам организации и функционирования их биологических аналогов. Они способны решать широкий круг задач распознавания образов, идентификации, прогнозирования, оптимизации, управление сложными объектами. Дальнейшее повышение производительности компьютеров все в большей мере связывают с ИНС, в частности, с нейрокомпьютерами (НК), основу которых составляет искусственная нейронная сеть.
Глубокое изучение ИНС требует знания нейрофизиологии, науки о познании, психологии, физики (статистической механики), теории управления, теории вычислений, проблем искусственного интеллекта, статистики, математики, распознавания образов, компьютерного знания, параллельных вычислений и аппаратных средств (цифровых и аналоговых). С другой стороны, ИНС также стимулируют эти дисциплины, обеспечивая их новыми
инструментами и представлениями. Этот симбиоз жизненно необходим для исследования нейронных сетей.
Представим некоторые проблемы, решаемые искусственными нейронными сетями.
Классификация образов. Задача классификации состоит в указании принадлежности некоторого входного образа, представленного вектором признаков, одному или нескольким предварительно определенным классам. К известным приложениям относятся распознавание букв, распознавание речи, классификация сигнала электрокардиограммы, классификация клеток крови.
Кластеризация/категоризация. При решении задачи кластеризации, которая известна также как классификация образов без учителя, отсутствует обучающая выборка с метками классов. Алгоритм кластеризации основан на подобии образов и размещает близкие образы в один кластер. Известны случаи применения кластеризации для извлечения знаний, сжатия данных и исследования свойств данных.
Аппроксимация функции. Предположим, что имеется обучающая выборка, которая генерируется неизвестной функцией, искаженной шумом. Задача аппроксимации состоит в нахождении оценки этой функции.
Прогнозирование. Пусть в последовательные моменты времени t]_,t2,..., tN заданы N дискретных отсчетов {y(t1),... ,y(tN)}. Задача состоит в предсказании значения y(tN +i) в момент tN +1. Прогноз имеет значительное влияние на принятие решений в бизнесе, науке и технике.
Оптимизация. Многочисленные проблемы в математике, статистике, технике, науке, медицине и экономике могут рассматриваться как проблемы оптимизации. Задачей оптимизации является нахождение решения, которое удовлетворяет системе ограничений и максимизирует или минимизирует целевую функцию.
Память, адресуемая по содержанию. В модели вычислений фон Неймана обращение к памяти доступно только посредством адреса, который не зависит от содержания памяти. Более того, если допущена ошибка в вычислении адреса, то может быть найдена совершенно иная информация. Память, адресуемая по содержанию, или ассоциативная память, доступна по указанию заданного содержания. Содержимое памяти может быть вызвано даже по частичному или искаженному содержанию. Ассоциативная память чрезвычайно желательна при создании перспективных информационно-вычислительных систем.
Управление. Рассмотрим динамическую систему, заданную {u(t),y(t)}, где u(t) является входным управляющим воздействием, a y(t) — выходом системы в момент времени t. В системах управления с эталонной моделью целью управления является расчет такого входного воздействия u(t), при котором система следует по желаемой траектории, диктуемой эталонной моделью.
Классификация ИНС
Нейронная сеть представляет собой совокупность нейроподобных элементов, определенным образом соединенных друг с другом и с внешней средой с помощью связей, определяемых весовыми коэффициентами.
С точки зрения топологии можно выделить три основных типа нейронных сетей.
Полносвязные сети, в которых каждый нейрон передает свой выходной сигнал остальным нейронам, в том числе и самому себе.
Слабосвязные (с локальными связями) сети, где нейроны располагаются в узлах прямоугольной и гексагональной решетки.
Многослойные нейронные сети — в данных сетях нейроны объединяют в слои.
В свою очередь, среди многослойных нейронных сетей выделяют следующие типы:
сети без обратных связей (прямого распространения) — в таких сетях, называемых многослойным персептроном, нейроны входного слоя получают входные сигналы, преобразуют их и передают нейронам первого скрытого слоя, и так далее вплоть до выходного, который выдает сигналы для интерпретатора и пользователя;
сети с обратными связями (рекуррентные), в которых информация с последующих слоев передается на предыдущие.
Мы будем рассматривать и изучать далее многослойные сети прямого распространения.
Нейрон как составная часть ИНС
Нейрон является составной частью нейронной сети. Он состоит из элементов трех типов: умножителей (синапсов), сумматора и нелинейного преобразователя. Синапсы осуществляют связь между нейронами, умножают входной сигнал на число, характеризующее силу связи (вес синапса). Сумматор выполняет сложение сигналов, поступающих по синаптическим связям от других нейронов, и внешних входных сигналов. Нелинейный преобразователь реализует нелинейную функцию одного аргумента — выхода сумматора. Эта функция называется функцией активации или передаточной функцией. На рис. 10 приведено строение одного нейрона.
Нейрон в целом реализует скалярную функцию векторного аргумента. Математическая модель нейрона:
n
s = ^ ад + b,
i=i
где Wi — вес синапса; i = 1,..., n; b — значение смещения; s — результат суммирования; xi есть i-й компонент входного вектора (входной сигнал), i = = 1,..., n; y — выходной сигнал нейрона; n — число входов нейрона,; f (s) — нелинейное преобразование (функция активации).

Рис. 10. Нейрон
В общем случае входной сигнал, весовые коэффициенты и смещение могут принимать действительные значения, а во многих практических задачах—лишь некоторые фиксированные значения. Выход определяется видом функции активации и может быть как действительным, так и целым.
В качестве функции активации нейронов берут обычно одну из следующих:
пороговая функция активации;
экспоненциальная сигмоида;
рациональная сигмоида;
гиперболический тангенс.
Вид этих функций будет описан в следующем разделе.
Данные функции активации обладают таким важным свойством как нелинейность. Нелинейность функции активации принципиальна для построения нейронных сетей. Если бы нейроны были линейными элементами, то любая последовательность нейронов также производила бы линейное преобразование и вся нейронная сеть была бы эквивалентна одному нейрону (или одному слою нейронов в случае нескольких выходов). Нелинейность разрушает суперпозицию и приводит к тому, что возможности нейросети существенно выше возможностей отдельных нейронов.
Архитектура многослойной сети прямого распространения
Опишем самую популярную архитектуру — многослойный персептрон с последовательными связями и сигмоидальной функцией активации (Feedforward Artifitial Neural Network, FANN).
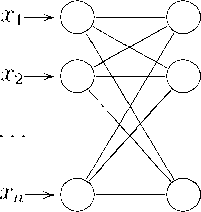
В многослойных нейронных сетях с последовательными связями нейроны делятся на группы с общим входным сигналом — слои. Стандартная сеть
состоит из L слоев, пронумерованных слева направо. Каждый слой содержит совокупность нейронов с едиными входными сигналами. Внешние входные сигналы подаются на входы нейронов входного слоя (его часто нумеруют как нулевой), а выходами сети являются выходные сигналы последнего слоя. Кроме входного и выходного слоев в многослойной нейронной сети есть один или несколько скрытых слоев, соединенных последовательно в прямом направлении и не содержащих связей между элементами внутри слоя и обратных связей между слоями. Число нейронов в слое может быть любым и не зависит от количества нейронов в других слоях. Архитектура нейронной сети прямого распространения сигнала приведена на рис. 11.
O^V2
О^Уп
Рис. 11. Архитектура многослойной сети
На каждый нейрон первого слоя подаются все элементы внешнего входного сигнала. Все выходы нейронов i-го слоя подаются на каждый нейрон слоя i + 1.
Нейроны выполняют взвешенное суммирование элементов входных сигналов. К сумме прибавляется смещение нейрона. Над результатом суммирования выполняется нелинейное преобразование — функция активации (передаточная функция). Значение функции активации есть выход нейрона. Приведем схему многослойного персептрона. Нейроны представлены кружками, связи между нейронами — линиями со стрелками.
Функционирование сети выполняется в соответствии с формулами:
Nk-
L;
s[k] _ sj _
Е wjk]y'k—1] + j], j _1,...,Nk, k _1,..
i = 1
j _ f j, j _1,...,Nk, k _ 1,... ,L — 1,
[L] [L]
где
yj _ sj ,
yf 1] — выходной сигнал i-го нейрона (k — 1)-го слоя;
wji —вес связи между j-м нейроном слоя (k — 1) и i-м нейроном k-го слоя;
bjk] — значение смещения j-го нейрона k-го слоя;
y = f (s) — функция активации;
[k] „ , yj — выходной сигнал j-го нейрона k-го слоя;
Nk — число узлов слоя k;
L — общее число основных слоев;
n = N0 — размерность входного вектора;
m = Nl — размерность выходного вектора сети.
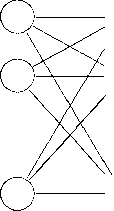
На рис. 12 представлена сеть прямого распространения сигнала с пятью входами, тремя нейронами в скрытом слое и двумя нейронами в выходном слое.
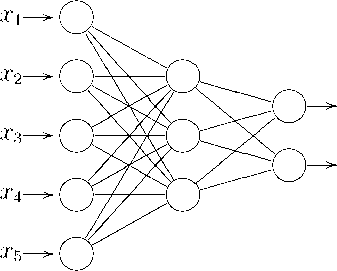
Рис. 12. Пример нейронной сети
Функции активации
В качестве функции активации нейронов берут обычно одну из следующих.
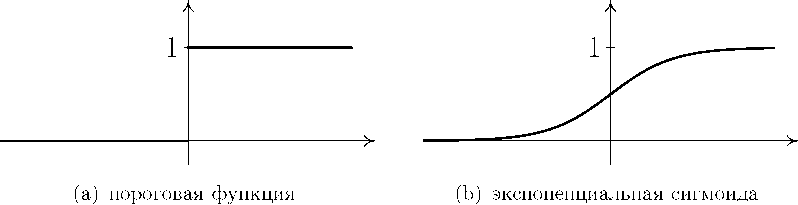
Пороговая функция активации
f (s) = lh s 1 0
w [0, s< 0.
Эта функция имеет разрыв первого рода в точке x = 0. График этой функции приведен на рис. 13(a).
Экспоненциальная сигмоида f (s) =
1+(1-as(рис. 13(b)). При уменьшении
параметра а сигмоида становится более пологой, вырождаясь в горизонтальную линию на уровне 0.5 при а = 0. При увеличении а сигмоида все больше приближается к функции единичного скачка.
Рациональная сигмоида f (s) = -щ+а. График этой функции приведен на рис. 13(c).
S _ S
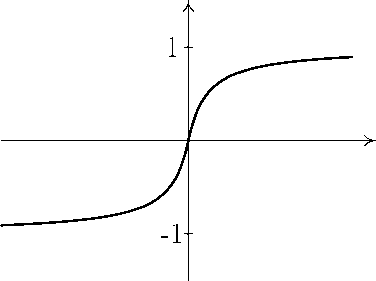
(c) рациональная сигмоида
Рис. 13. Графики различных функций активации
Гиперболический тангенс f (s) = ths =
e°S-e_1.
1 j \ / a e a +e a
Здесь a — некоторый параметр.
В отличие от пороговой функции активации, три последние функции являются непрерывными, и более того, бесконечно дифференцируемыми. При решении практических задач чаще используют экспоненциальную сигмоиДу, и реже — гиперболический тангенс, так как для его реализации требуется большее число тактов работы ЭВМ. Кроме того, сигмоидальные функции обладают таким важным свойством как нелинейность.
Обучение многослойной сети прямого распространения
Если все параметры многослойной сети прямого распространения зафиксированы, то есть W = {wj}, B = j — заданы, то многослойная сеть
прямого распространения осуществляет отображение пространства Rn в пространство Rm. Обозначим это отображение:
y = N(x, W, B),
где W, B — параметры отображения; x Е Rn — аргумент отображения; у Е Rm — образ отображения.
Назовем пару (x,y), X Е Rn, у Е Rm, обучающим примером.
В различных практических задачах обучающими примерами могут быть:
в задачах классификации: X — набор значений параметров, у — номер класса, которому соответствует данный набор;
в задачах прогнозирования: X — набор значений некоторой величины за последние n замеров, у — прогнозируемое значение этой величины;
в задачах аппроксимации: X — аргумент функции, у — значение аппроксимируемой (приближаемой) функции в точке X;
в задачах управления: X — входное управляющее воздействие некоторой динамической системы, у — выход системы.
Обозначим все множество обучающих пар (X,y) для данной задачи M. В практических задачах множество M состоит обычно из конечного числа пар: M = {(X1 ,у1)} i=i...p.
Если в необученную сеть ввести входной сигнал X одного из обучающих примеров выборки M, то выходной сигнал у = N(X, W, B) будет отличаться от требуемого у, определенного в обучающем примере.
Обучить многослойную сеть прямого распространения — это значит найти такие параметры W, B, чтобы ошибка сети на всем множестве обучающих примеров была как можно меньше.
К обучению сети возможны три подхода:
обучение на всем множестве примеров;
одиночное предъявление обучающих примеров;
постраничное обучение.
Обучение на всем множестве примеров
Рассмотрим более подробно метод обучения на всем множестве примеров.
Составим функцию ошибки, которая определяет степень близости входных сигналов к требуемым при решении всей совокупности примеров обучающей выборки:
pm
V = 2 ЕЕ (у1 - у)2’ (8)
1=1 i=1
где yi — i-я компонента вектора N(X1, W, B).
Функция (8) представляет собой сумму ошибок по всем обучающим примерам.
Таким образом, обучение сети эквивалентно задаче нахождения глобального минимума функции V многих переменных.
Для многослойной сети прямого распространения, состоящей из L основных слоев, где k-й слой содержит Nk нейронов, число переменных функции LL
будет равно ^ NkNk-1 + ^2 Nk, то есть сумме общего числа связей и об- k=1 k=1 щего числа смещений.
Для решения задачи минимизации V ^ min может быть использован весь арсенал известных методов оптимизации:
алгоритмы локальной оптимизации с вычислением частных производных первого порядка;
алгоритмы локальной оптимизации с вычислением частных производных первого и второго порядков;
стохастические алгоритмы;
методы глобальной оптимизации.
Алгоритм обратного распространения ошибки
Наиболее используемым алгоритмом обучения многослойной сети прямого распространения является алгоритм обратного распространения ошибки (back propagation). Это рекурсивный алгоритм, который сначала применяется к выходным нейронам сети, а затем проходит сеть в обратном направлении до первого слоя. В его основе лежит градиентный метод поиска минимума функции многих переменных. Синаптические веса настраиваются в соответствии с формулами
j + 1) = j) + £ £ дМ.' (t)yifc-1]''(t);
l=1 г = 1..., Nk—1; j = 1..., Nk; k = ^ L — 1..., 2;
p
(t + 1) = (t) + ££ д1](t)xi; г = 1,... ,No; j = 1... ,N1; '=1
j.' = (yj — yjL’ .')/.'); j = 1,..., Nl; Nl = m;
Nfc+i
дМ.' = £ д!к+1].'w.jk|+1]/'(sjk].'); j = 1,..., Nk; k = L — 1, L — 2,..., 1;
i=1
bjk] (t + 1) = + £ £ д»'(t); j = 1,..., Nk; k = L, L — 1,..., 1. '=1
Индекс l сверху означает, что данная величина вычислена для l-го обучающего примера.
Обучение на всем множестве примеров связано с определенными трудностями:
все примеры могут не уместиться в оперативной памяти;
сразу всех примеров может и не быть;
есть шанс попадания в локальный минимум.
Поэтому полезно предварительное обучение на меньшем количестве примеров.
Метод одиночного предъявления примеров
Суть этого подхода состоит в том, что после предъявления обучающего примера параметры сети модифицируются так, чтобы улучшить решение одного примера. С этой целью используются формулы метода back propagation с числом обучающих примеров равным единице, при этом они примут вид
w[(t + 1) = wij(t) + гД[к| (%Г-1|(г); i = ^ . . . , Nk-1; j = 1, . . . , Nk; k = L, L — ~1, . . . , 2; wjj(t + 1) = wj1 (t) + гД^1](t)X!; i = 1,..., No; j = 1,..., N1; Д'4 = (yj — yjL)f'(sjL|); j = 1,..., Nl; Nl = m;
Nk+1
д[Ч = ^ дц-Чwjk+Чf'(sW); j = 1,..., Nk; k = L — 1, L — 2,..., 1;
i=1
b[](t + 1) = bjk|(t) + гД[к| (t); j = 1,..., Nk; k = L, L — 1,..., 1.
Недостатками этого подхода являются:
обучение происходит слишком медленно, так как величину г необходимо брать очень малой, иначе при обучении будет теряться навык к уже пройденным примерам;
неустойчивость сходимости.
Постраничное обучение
При постраничном методе сети предъявляются для обучения примеры сериями, то есть страницами. Страница — серия примеров, предъявляемая сети для обучения. Модификация параметров сети осуществляется исходя из всех примеров страницы. Первую страницу рекомендуется формировать из опорных примеров, характеризующих особенности функции, которую должна будет реализовать сеть (например, если сеть обучают классифицировать образы, то в первую страницу рекомендуется включить наиболее ярких представителей каждого класса).
В ходе обучения объем страницы и разнообразие примеров на ней можно увеличить (так как после начального образования появляется возможность для быстрого освоения все больших страниц).
Кроме того, важно, чтобы каждая страница была достаточно разнообразной, и на ней присутствовали представители разных классов
Для каждой страницы применяются формулы back propagation с той лишь разницей, что суммирование идет только по тем примерам, которые входят в данную страницу.
Использование многослойной сети прямого
распространения для решения задач аппроксимации
Фундаментальным фактом, лежащим в основе использования многослойной сети прямого распространения при решении многих практических задач, является способность такой сети аппроксимировать любое непрерывное отображение.
Постановка задачи
Пусть Rm означает m-мерное евклидово пространство с расстоянием pm(x, y) между векторами x = (x1,..., xm) и y = (y1,..., ym), задаваемое по формуле
m
![]()
В частности, при m = 1 будет p(x,y) = |x — y|.
Определение 1. Пусть заданы два отображения f : Q ^ Rm и g :
Q ^ Rm, где Q есть ограниченное замкнутое подмножество пространства Rn. Говорят, что функция g аппроксимирует (приближает) функцию f с ошибкой (точностью) е > 0 на множестве Q С Rn, если
Pm(f (x),g(x)) < е
для всех x Е Q.
Определение 2. Пусть Q есть ограниченное замкнутое подмножество пространства Rn. Обозначим Cq^r™ множество всех непрерывных отображений из Q в Rm. Пусть G — некоторое множество отображений, определенных в Q, со значениями в Rm. Говорят, что множество G плотно в множестве Cq^r™, если для любого f Е Cq^r™ и любого е > 0 существует g Е G, которое аппроксимирует f с заданной точностью е на Q.
В качестве G (то есть множества, всюду плотного в Cq^r™ ), желательно брать такое, элементы которого бы имели простую структуру и допускали легкую реализацию на ЭВМ. В качестве G можно взять множество отображений, реализуемых многослойными сетями прямого распространения.
Теорема 2 (теорема о полноте). Пусть Q есть ограниченное замкнутое подмножество пространства Rn. Множество всех отображений, осуществляемых многослойными сетями прямого распространения с n входами, m выходами, является плотным в Cq^r™ тогда и только тогда, когда функция активации а является непрерывной и не является многочленом.
Таким образом, нейронные сети являются универсальными структурами, позволяющими реализовать любой вычислительный алгоритм. Для представления многомерных функций многих переменных может быть использована однородная двухслойная нейронная сеть с сигмоидальными передаточными функциями.
![]()
m
N
+ 1 I (n + m + 1) + m,
Для оценки числа нейронов в скрытых слоях однородных нейронных сетей можно воспользоваться формулой для оценки необходимого числа синаптических весов Lw в многослойной сети с сигмоидальными передаточными функциями:
где n — размерность входного сигнала, m — размерность выходного сигнала, N — число элементов обучающей выборки.
Использование нейронных сетей
для решения задач прогнозирования
Прогнозирование экономических процессов
Задача прогнозирования состоит в вычислении и предсказании некоторых деталей будущего. Затем эта информация используется менеджерами для принятия стратегического решения. Для создания прогноза обычно используются данные исторического тренда, а также статистические методы или модели линейного программирования. Существуют:
качественные методы прогноза, например, мнение экспертов (Delphi method), или отчеты об исследовании потребительских предпочтений;
методы анализа временных рядов (Time Series Analysis Methods), например, метод изменчивого среднего (moving average), метод Бокса —Дженкинса;
причинные методы (causal methods), например, анализ статистических требований (Statistical demand analysis), или экономические модели.
Задача прогнозирования продаж
Прогнозирование продаж играет видную роль в системах принятия решений. Эффективное и заблаговременное предсказание продаж может помочь ЛПР вычислить стоимость продукции, материальных затрат, и даже определить цену продаж. Большинство методов, применяемых для предсказания продаж, используют те или иные факторы или данные временных рядов. Однако зависимость между этими факторами или данными временных рядов (независимые переменные) и величиной продаж (зависимая переменная) всегда слишком сложная. Получение результата посредством вышеуказанного подхода слишком трудоемко. Поэтому многие ЛПР используют свою интуицию, а не подходы, связанные с построением моделей.
Задача прогнозирования курса акций
В настоящее время имеется много методов для определения тенденции курса акций. В соответствие со своими специфическими свойствами они могут быть классифицированы следующим образом.
Технический анализ — проводится анализ тенденции курс акции в соответствие со стоимостью и транзакциями в прошлом. Основой технического анализа является математическая статистика и теория математического прогнозирования. При этом могут быть использованы:
линейная регрессионная модель Y = f (xi,... ,xn) для определения прогноза, где Y — прогнозируемая величина, xi,...,xn — независимые переменные (факторы), f — линейная функция;
нелинейная регрессионная модель, f — нелинейная функция, (пример—функция Кобба—Дугласа Y = XKaLi-a);
авторегрессионная модель (при анализе данных временных рядов);
другие методы прогнозирования случайных процессов.
Элементарный анализ — анализ внутренней информации, появляющейся на рынке. Например, формы финансовых отчетов, отчеты о прибылях и убытках, экономические статьи и т.д. Примером может служить падение курса акций Microsoft после решения суда о признании компании виновной в нарушении антимонопольного законодательства.
Информационный анализ — в его основе лежит анализ финансовой и индустриальной политики правительства, выход государства на рынок акций, война и т.п.
Следует отметить, что имеется много примеров как успешного, так и неудачного применения этих трех подходов к прогнозированию тенденции курса акций.
Отметим также, что в основе современного подхода к решению задачи прогнозирования лежит концепция детерминизма. Каждый из трех вышеупомянутых методов основан на этой концепции. Основная ее идея состоит в том, что для фиксированных начальных условий будущее является строго определенным, детерминированным. И даже если начальные условия имеют небольшую ошибку, будущее может быть определено приближенно.
Вместе с тем тенденция движения курса акций связана с потребностью акций со стороны населения. Это как раз та причина, по которой прогнозирование тенденции движения курса акций есть чрезвычайно трудная проблема.
Кроме того, современная экономическая наука утверждает, что прогноз рынка принципиально невозможен.
Действительно, классическая модель Эрроу — Дебре утверждает, что экономическая система имеет конечное число точек равновесия, причем в окрестности любого устойчивого равновесия поведение системы слабо зависит от ее истории. Современная модель Эрроу — Дебре описывает взаимодействие многих рынков. В модель включены неопределенность и рынок ценных бумаг. Доказано, что для такой модели число равновесий не просто бесконечно, но и континуально. Динамика такой системы принципиально не прогнозируема и существенно зависит от характера пусть даже небольших внешних воздействий.
Многослойная сеть прямого распространения как возможный инструмент прогноза
Отметим причины, по которым многослойная сеть прямого распространения может быть применена для решения задач прогноза.
Такая сеть обучается на примерах и «добывает» необходимую функциональную зависимость между зависимыми и независимыми переменными, даже если эта зависимость неизвестна и трудна для описания. Поэтому некоторые исследователи трактуют FANN как один из многопеременных нелинейных непараметрических статистических методов.
Многослойная сеть прямого распространения способна к обобщению. После обучения сеть может делать корректное заключение для примеров, не входящих в обобщающую выборку, даже если данные имеют «шум».
Многослойная сеть прямого распространения — универсальный аппрок- симатор.
Многослойная сеть прямого распространения — нелинейна, в то время как большинство традиционных методов прогноза предполагают, что рассматриваемые временные ряды порождены линейными процессами. На самом деле процессы реального мира часто нелинейные.
Существует два подхода к применению многослойной сети прямого распространения при решении задач прогнозирования.
Предсказание на основе независимых переменных-причин. В этом случае вход сети — независимые предикаторные переменные. Функциональная зависимость может быть представлена в виде у = f (x1,... ,xp), где X1, . . . , Xp есть p независимых переменных, а у является зависимой переменной. В этом случае многослойная сеть прямого распространения есть функциональный эквивалент нелинейной регрессионной модели.
Экстраполяция, или задача прогнозирования временных рядов. Вход сети есть предыдущие наблюдения рядов данных, а выход — будущее (прогнозируемое) значение. Сеть представляет следующую функциональную зависимость:
yt+1 = f (yt, yt-1,..., yt-p),
где yt — значение наблюдаемой величины в момент t.
В этом случае многослойная сеть прямого распространения есть эквивалент нелинейной авторегрессионой модели для задач прогнозирования на основе временных рядов.
Обучающий пример состоит из конечного набора предыдущих значений временного ряда. Предположим, мы имеем N значений у1,... ,yn в обучающем множестве и мы строим одношаговый прогноз. Тогда, используя FANN с n входами, мы получаем N — n обучающих примеров. Первый из них состоит из у1,..., yn и yn+1 — требуемый (желаемый) выход. Второй будет содержать у2,..., yn+1 и yn+2 — желаемый выход. Наконец, последний обучающий пример: yN—n, yN—n+1,..., yN—1 — на входе и yN — цель.
Процесс обучения сети состоит в минимизации функций ошибки
N
= 2 S (Уг - ai)2’
i=n+1
где ai — действительный выход сети для i-го обучающего примера.
Выводы по использованию нейронных сетей для решения различных задач прогнозирования
Оценке возможностей нейронных сетей прямого распространения для решения задач прогнозирования на основе временных рядов посвящено большое количество исследований. Однако их заключения часто противоречат друг другу. Часть из них заключают, что нейронные сетей прямого распространения лучше, чем общепринятые методы, другая часть утверждает обратное. При сравнении нейронных сетей прямого распространения и модели Бокса- Дженкинса (при этом использовались данные о графике пассажирских авиаперевозок, данные об объемах продаж в США автомобилей фирм США и автомобилей зарубежных производителей) эксперты пришли к выводу, что модель Бокса — Дженкинса дает лучший краткосрочный прогноз, в то время как модель на основе нейронных сетей предпочтительнее при долгосрочном прогнозе.
Вслед за успешным применением нейронных сетей прямого распространения в научных работах практически все системы для интеллектуального анализа данных используют нейронные сети в качестве инструмента прогноза.