

Вопрос 1:
Переходные – посадки при которых в соединениях возможно получение как зазора, так и натяга (поля допусков отверстия и вала перекрываются частично или полностью).
Посадки переходные: для посадок переходных основные отклонения – Js(js), J(j), K(k), M(m), N(n). Квалитеты IT5-IT12.
Посадка переходная в системе отверстия.
Ø20 H7/js6
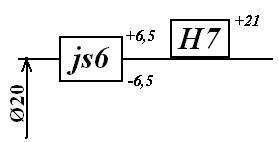
TSN=|Smax|+|Nmax|=TD+Td=27.5+6.5=34=21+13=34
Посадка переходная в системе вала.
Ø20 Js7/h6
TSN=|Smax|+|Nmax|=TD+Td=23.5+10.5=34=21+13=34
3 Вида обозначений на чертежах:
1) Ø20g6
2) Ø20-0,020-0,007(друг над другом)
Ø20g6(-0,020-0,007)
Применение переходных посадок.
Переходные посадки используют для неподвижных разъемных соединений при частой сборке и разборке.
H7/n6 для передач со значительными крутящими моментами с ударами и вибрациями;
H7/m6 – муфты;
H7/m6, H7/k6 – подшипника качения;
H7/js6 – подшипники качения, легкоразъемные соединения.
Вопрос 2:
Шероховатость – чередование микровыступов и впадин на рассматриваемой поверхности в пределах базовой длины l.
Профилограмма – кривая, описывающая характер поверхности.
Базовая длина l – участок, на котором оценивается шероховатость.
Средняя линия m-m – линия, проведенная так, что в пределах базовой длины l сумма выступов равна сумме впадин.
Группы микронеровностей (шероховатостей):
1) высотные параметры: Ra, Rz, Rmax;
2) шаговые параметры: Sm, S;
3) Параметр относительной опорной длины (профиля или формы): tp.
1) Ra – среднее арифметическое отклонение.
2) Rz – средняя высота неровностей по 10 точкам:
3) Rmax – разность между максимальным выступом и минимальной впадиной.
Rmax=himax-himin
4) Sm – среднее арифметическое шага неровностей.
5) S – среднее арифметическое шагов местных выступов.
6) tp – параметр относительной опорной длины.
tp=ηp/100%
ηp=Σbi
p – уровень сечения профиля от самой высокой точки.
Выбор параметров шероховатости.
1) Для трущихся поверхностей, подверженных износу назначается и контролируется Ra (Rz) и tp.
2) Для циклически нагруженных поверхностей подверженных вибрациям Sm, Rmax.
3) Для герметичных поверхностей, деталей испытывающих натяг Ra (Rz).
Контроль шероховатости:
1) Профилограф, профилометр: контактная игла идет по поверхности и выдает значение.
2) Окулярный микроскоп.
Обозначения на чертежах:
любой вид обработки
со снятием слоя
не обрабатывается
Вопрос 3:
Кинематическая погрешность передачи - разность между действительным и номинальным углами поворота ведомого зубчатого колеса передачи.
 Погрешность
передаточного отношения Fior
= (
2 действ
-
2 ном)
* r
[мкм] ;
Погрешность
передаточного отношения Fior
= (
2 действ
-
2 ном)
* r
[мкм] ;
2 ном = 1 * (Z1 / Z2)
Кинематическая погрешность колеса – разность между действительным и номинальным углами поворота зубчатого колеса на его рабочей оси.
|
|
|
|
|
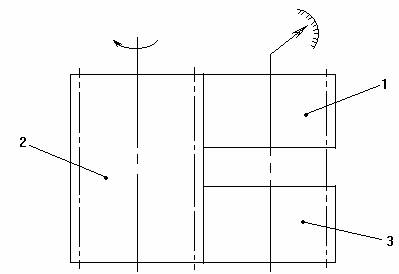
Колеса 1 и 3 находятся в однопрофильном зацеплении с ведущим колесом 2. Возможный поворот колеса 3 относительно 1 фиксируется. Вращение от 2 передается 1 и 3 колесами. Они будут вращаться синхронно, если 3 выполнено так же точно, как и 1, но вследствие погрешностей 3 будет проворачиваться относительно 1.
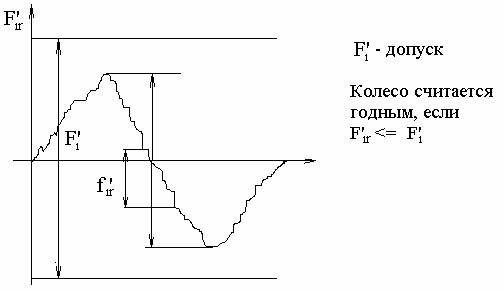
Наибольшая алгебраическая разность отклонений действительных угловых положений колеса 3 относительно номинального положения за оборот соответствует значению колебаний кинематической погрешности колеса F’ir и ограничивается допуском Fi .
Пример обозначения точности зубчатого колеса для отсчетных передач.
.
6-7-7 C, 5-6-6 С
№10
1 .Система отверстия. Схема расположения полей допусков трех типов посадок в системе отверстия. Примеры обозначения посадок в системе отверстия на чертеже.
Параметр формы шероховатости. Нормирование и примеры обозначения на чертежах шероховатости поверхности с использованием параметра формы.
Систематические погрешности измерения, способы их обнаружения и устранения.