

4.4 Оптимальное значение параметра гидроусилителя
![]() (54)
(54)
Графически зависимость качества системы от параметра «D» в диапазоне устойчивости выглядит так:

Рисунок 4.3 – Зависимость качества системы от параметра D
Оптимальное значение параметра для наилучшей работы системы в обоих режимах определяется по графику примерно:
D=0,66
При оптимальном значении параметра интегральная квадратичная оценка равна:
 (55)
(55)
А установившаяся ошибка равна:
![]() (56)
(56)
5 Частотный анализ гидроусилителя
5.1 Частотная передаточная функция
 (57)
(57)
![]() (58)
(58)
![]() (59)
(59)
5.2 Амплитудно-фазовая частотная характеристика
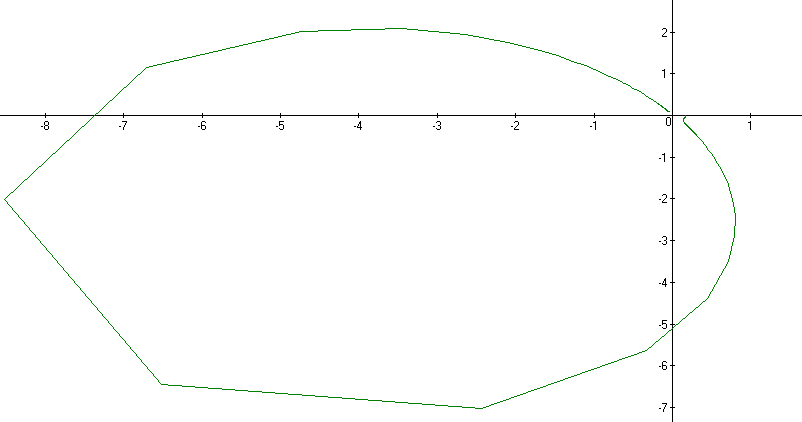
Рисунок 5.1 – График АФЧХ.
5.3 Амплитудно-частотная характеристика
АЧХ определяется вещественной и мнимой составляющими АФЧХ по формуле:
![]() (60)
(60)
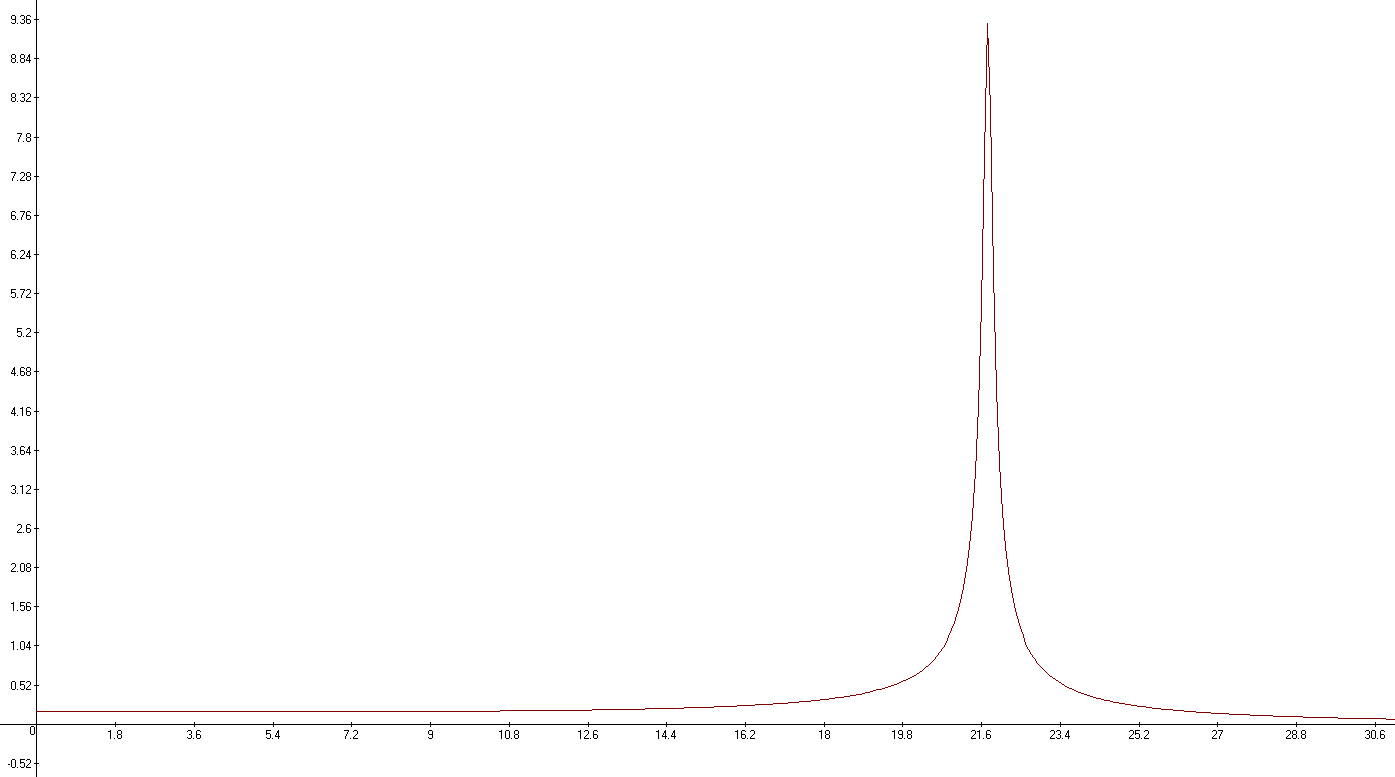
Рисунок 5.2 – График АЧХ
По этому графику примерно находятся следующие показатели:
Резонансная
частота:
![]() (61)
(61)
Частота среза:
![]() (62)
(62)
Полоса пропускания:
![]() (63)
(63)
Колебательность:
![]() (64)
(64)
5.4 Фазово-частотная характеристика
ФЧХ определяется вещественной и мнимой составляющими АФЧХ по такой формуле:
![]() (65)
(65)
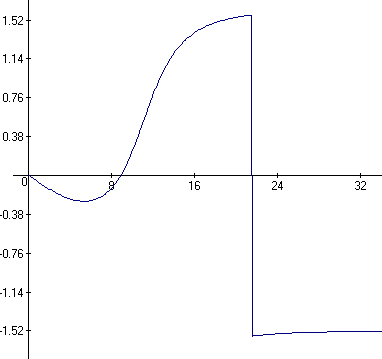
Рисунок 5.3 – График ФЧХ.
5.5 Установившийся частотный режим работы гидроусилителя
Входной частотный сигнал задается функцией вида:
![]() (66)
(66)
Примем такие его параметры:
Амплитуда входного сигнала
![]() (67)
(67)
Фаза входного сигнала
![]() (68)
(68)
Частота сигнала соответствует резонансной частоте:
![]() (69)
(69)
С учётом принятых параметров:
![]() (70)
(70)
Выходной сигнал определяется функцией вида:
![]() (71)
(71)
АЧХ при резонансной частоте имеет максимум и примерно равна:
![]() (72)
(72)
Амплитуда выходного сигнала:
![]() (73)
(73)
ФЧХ при резонансной
частоте
![]() примерно равна:
примерно равна:
![]() (74)
(74)
Фаза выходного сигнала:
![]() (75)
(75)
С учётом вычисленных параметров:
![]() (76)
(76)
График установившегося частотного режима имеет такой вид:
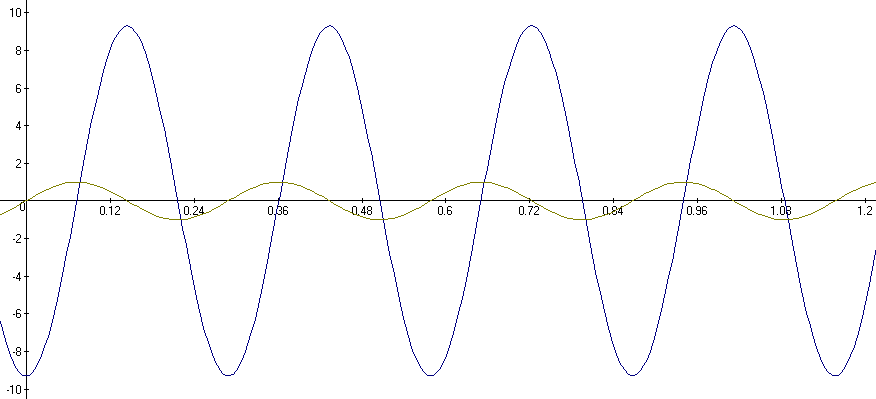
Рисунок 5.5 – График установившегося частотного режима
6. Моделирование работы системы управления
6.1 Переходная характеристика системы управления
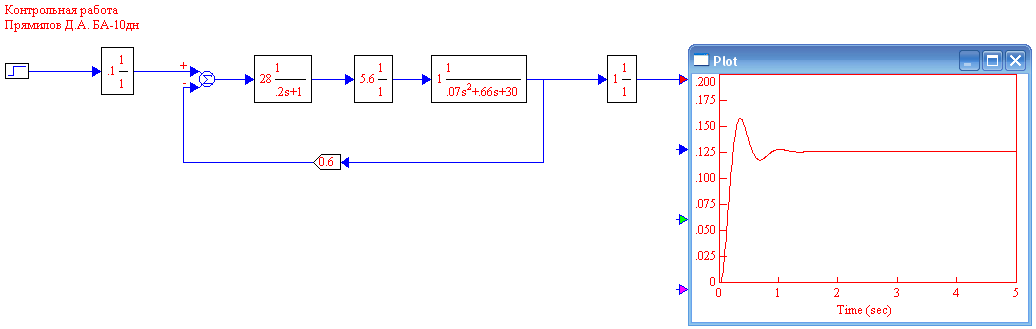
Рисунок 6.1 - Переходная характеристика системы управления
Переходная характеристика получена устойчивой при оптимальном значении параметра D = 0.66.
6.2 Проверка диапазона устойчивости
В вопросе устойчивости система может быть:
устойчива при D = 0.2
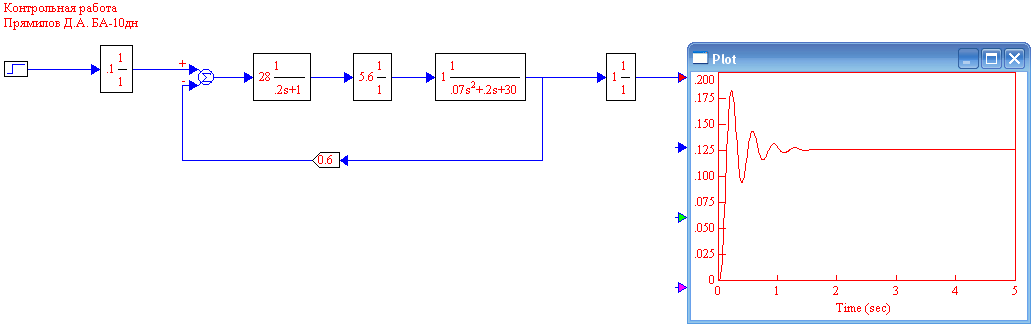
Рисунок 6.2 - Виртуальный стенд
неустойчива при D = -0.5
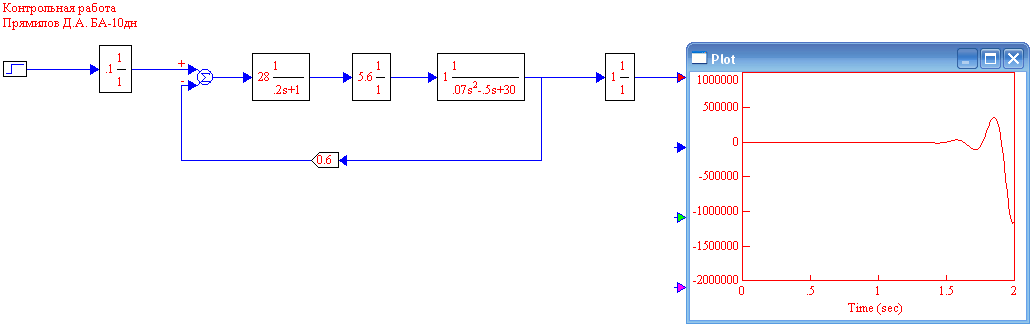
Рисунок 6.3 - Виртуальный стенд
нейтральна при D = 0.95
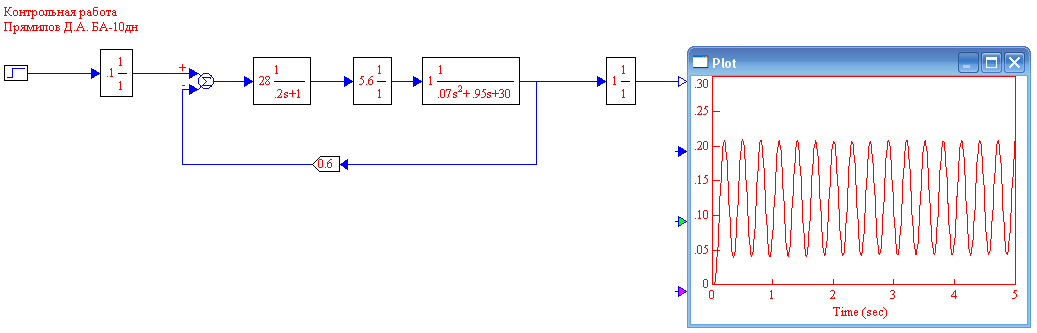
Рисунок 6.4 - Виртуальный стенд
Это подтверждает правильность найденного диапазона устойчивости (40) в пункте 4.1.
6.3 Проверка влияния параметра на качество переходного процесса
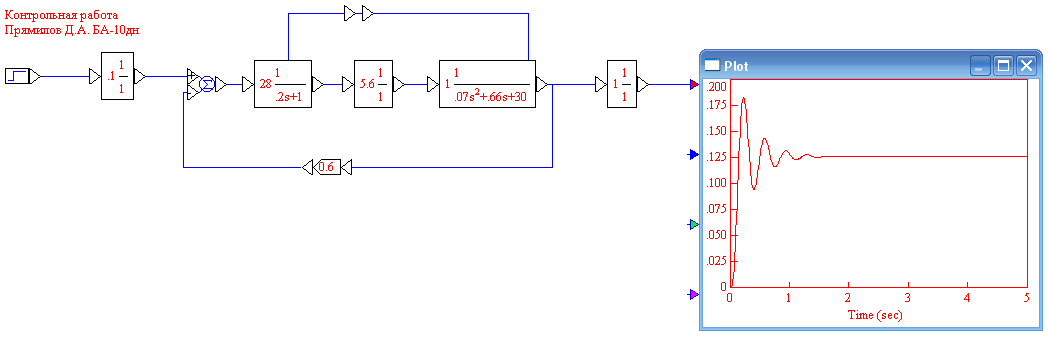
Рисунок 6.5 - Виртуальный стенд
При моделировании подтвердилось, что для оптимального значения параметра D = 0.66 интегральная квадратичная оценка накапливается до величины (55) примерно Qкв ≈ 0.139.
Это подтверждает правильность определения интегральной квадратичной оценки (48) в пункте 4.2.
6.4 Проверка влияния параметра на качество установившегося режима
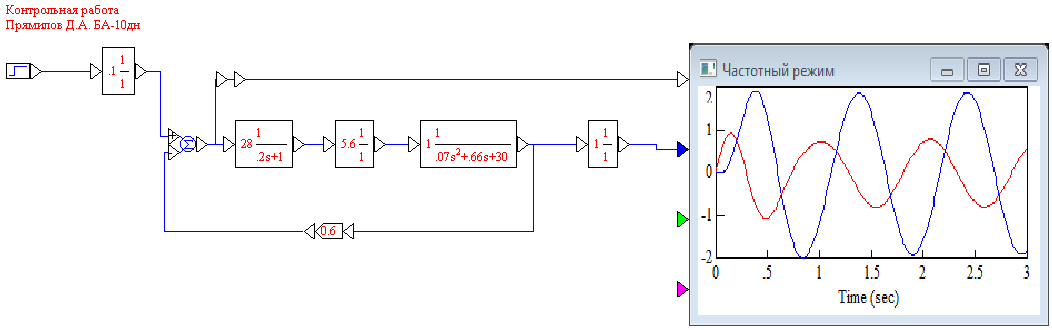
Рисунок 6.6 - Виртуальный стенд
При моделировании
подтвердилось, что для оптимального
значения параметра D
= 0.66 и при линейно растущем входном
сигнале
![]() ошибка управления устанавливается на
величине (53) примерно ey
≈ 0.02418.
ошибка управления устанавливается на
величине (53) примерно ey
≈ 0.02418.
Это подтверждает правильность определения установившейся ошибки (58) в пункте 4.3.
6.5 Частотные режимы работы системы управления
Рисунок 6.7 - Виртуальный стенд
При моделировании подтвердилось, что для оптимального значения параметра D = 0.66 при резонансной частоте (69) ω = 21.74 установившееся усиление амплитуды выходного сигнала (67), (72) равно примерно A ≈ 9.3.
Сдвиг фазы выходного сигнала относительно входного, как и усиление по амплитуде подтверждают расчётный график установившегося частотного режима из п. 5.5.
Это подтверждает правильность определения частотных характеристик в разделе 5.
Заключение
В результате проведенного анализа системы гидроусилителя решены следующие задачи:
Определен тип элементов системы управления и построены их переходные и статически характеристики.
Определен диапазон значений передаточного коэффициента рулевой трапеции в котором система управления устойчива: -6 … 0,9.
Определено влияние передаточного коэффициента рулевой трапеции на качество переходного и установившегося режимов.
Найдено оптимальное значение D обеспечивающее наилучшее качество переходного процесса системы: 0,66.
Получены частотные характеристики системы управления по которым установлено значение резонансной частоты системы равное 21,74 рад/с, частота среза равная 0 рад/с
По частотным характеристикам определен вид установившегося частотного режима соответствующий резонансной частоте при единичной амплитуде и нулевой фазе входного сигнала.
В ходе выполнения контрольной работы все поставленные задачи были успешно выполнены.
Список литературы
Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования, издание третье, исправленное. Москва, издательство «Наука», Главная редакция физико-математической литературы, 2007.
Егоров К.В. Основы теории автоматического регулирования, учебное пособие для вузов, изд. 2-е, перераб. и доп., - М.: "Энергия", 1967. - 648с., ил.
Зайцев Г. Ф. Теория автоматического управления и регулирования.— 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 2009.
Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы. - М.: ФИЗМАТЛИТ, 2008. - 288 с. - ISBN 5-9221-0379-2.
Ким Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. - М.: ФИЗМАТЛИТ, 2009. – 64 с. - ISBN 5-9221-0534-5.