

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Чайковский филиал
федерального государственного бюджетного
образовательного учреждения высшего профессионального образования
«Пермский национальный исследовательский политехнический университет»
(ЧФ ПНИПУ)
Кафедра автоматизации, информационных и инженерных технологий
КОНТРОЛЬНАЯ РАБОТА
по дисциплине: Теория автоматического управления
Тема: «Анализ и моделирование системы автоматического управления и ее оптимизация по одному из параметров»
Вариант №2
Выполнил студент группы БА-10дн |
|
Прямилов Д.А. |
Проверил к.ф.-м.н., доцент кафедры АИИТ
|
|
Селиванов К.М. |
2012
Содержание
Цель 2
Задачи 2
Исходные данные 3
Анализ элементов гидроусилителя 4
Анализ системы управления 8
Выбор параметра системы управления 12
Частотный анализ гидроусилителя 16
Моделирование работы системы управления 19
Заключение 23
Список литературы 23
Цель: Оптимизация качества функционирования системы управления во всех режимах и получить некоторые ее характеристики.
Задачи:
Необходимо провести анализ системы управления и ее элементов.
Определить тип элементов системы управления и построить их переходные и статические характеристики, а также статическую характеристику всей системы управления и описать ее работу
Определить диапазон значений параметра который неизвестен (нужно найти), в котором система управления устойчива
Определить влияние передаточного коэффициента на качество переходного и установившегося режимов.
Найти оптимальное значение передаточного коэффициента, обеспечивающее наилучшее качество переходного процесса и (или) наилучшее качество установившегося режима системы управления
Определить порядок астатизма (погрешность не зависит от внешнего воздействия) системы управления и значение установившейся ошибки
Получить частотные характеристики системы управления.
Необходимо смоделировать работу системы управления.
Получить переходную характеристику системы управления и определить время разгона системы
Подтвердить правильность определенного диапазона значений передаточного коэффициента, в котором система устойчива
Подтвердить правильность установленного влияния передаточного коэффициента на качество переходного и установившегося режимов и правильность выбора оптимального значения этого параметра
Получить вид переходного и установившегося частотного режима, подтверждающий правильность построенных частотных характеристик.
Следящая система гидроусилителя руля
1 Исходные данные
1.1 Принципиальная схема гидроусилителя руля
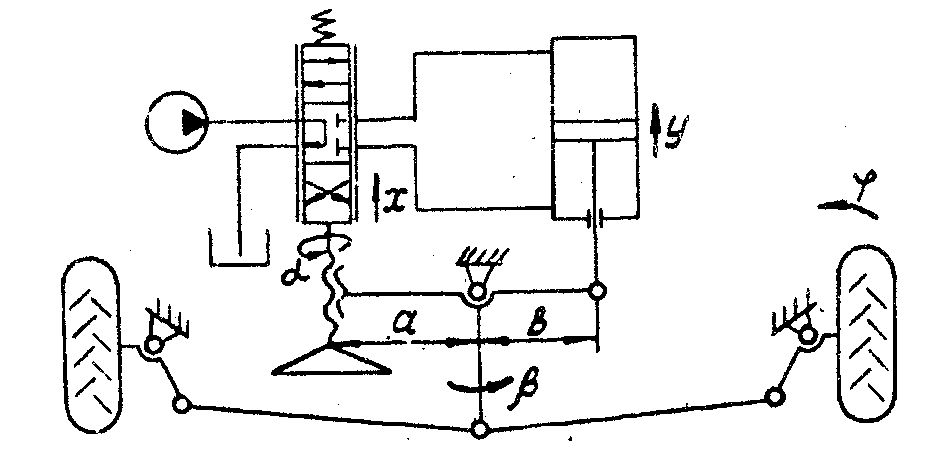
Рисунок 1.1 – Принципиальная схема гидроусилителя руля
1.2 Структурная схема гидроусилителя руля
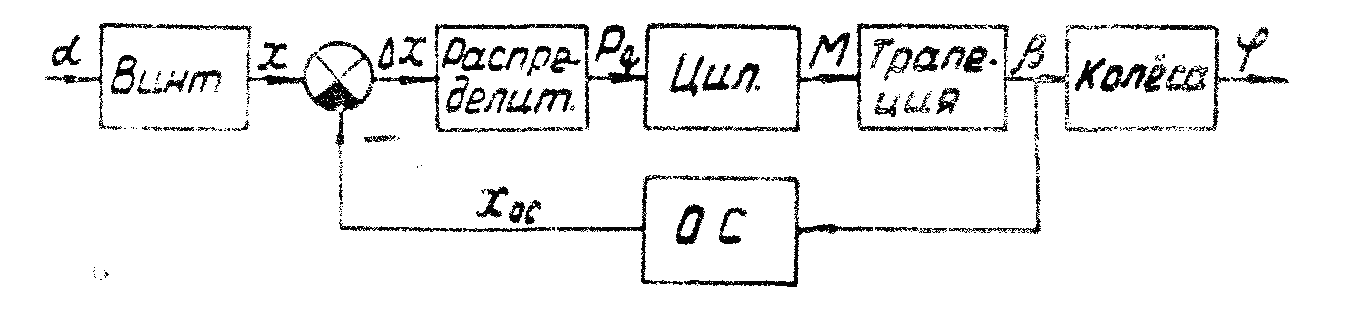
Рисунок 1.2 – структурная схема гидроусилителя руля
1.3 Уравнения динамики элементов гидроусилителя руля
Винт:
![]() (1)
(1)
где α – угол поворота руля;
х – смещение золотника распределителя;
К1 – коэффициент передачи винта.
Распределитель
(Р):
![]() (2)
(2)
где ∆х – результирующее смещение золотника распределителя
РД – давление рабочей жидкости в гидроцилиндре;
К2 – коэффициент передаточной характеристики распределителя;
Т – постоянная времени распределителя.
Гидроцилиндр
(ГЦ):
![]() (3)
(3)
где М – поворачивающий момент на трапеции;
S – активная площадь поршня гидроцилиндра;
b – плечо рычага гидроцилиндра.
Рулевая трапеция
(РТ):
![]()
(4)
где
![]() – угол поворота трапеции;
– угол поворота трапеции;
J – приведенный к трапеции момент инерции колес;
D – коэффициент динамического сопротивления;
С – приведенный к трапеции стабилизирующий момент колес.
Управляемые
колеса:
![]() (5)
(5)
где – угол поворота колес;
i – передаточное отношение рулевой трапеции.
Рычаг обратной
связи (ОС):
![]() (6)
(6)
где xОС – смещение золотника распределителя рычагом обратной связи;
a – плечо рычага обратной связи.
1.4 Значения параметров управления гидроусилителя
Таблица 1 – Исходные данные по вариантам БА-10дн по списку
Винт |
Распределитель |
ГЦ |
Рулевая трапеция |
Колеса |
ОС |
||||
К1 |
К2 |
Т |
S |
b |
J |
D |
C |
i |
a |
мм/град |
кг/(см2 мм) |
с |
см2 |
м |
кг м с2/град |
кг м с/град |
кг м/град |
- |
м |
0,1 |
28 |
0,2 |
80 |
0,07 |
0,07 |
? |
30 |
1 |
0,05 |
2 Анализ элементов гидроусилителя
2.1 Типы элементов гидроусилителя
Винт – пропорциональное идеальное звено;
Распределитель – пропорциональное инерционное звено;
Гидроцилиндр – пропорциональное идеальное звено;
Рулевая трапеция – пропорциональное колебательное звено;
Колеса – пропорциональное идеальное звено;
Рычаг обратной связи – пропорциональное идеальное звено.
2.2 Переходные характеристики элементов
Винт
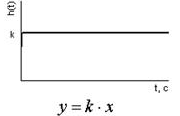
Рисунок 2.1 – Переходная характеристика винта
Распределитель
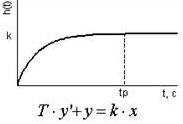
Рисунок 2.2 – Переходная характеристика распределителя
Гидроцилиндр
Рисунок 2.3 – Переходная характеристика гидроцилиндра
Рулевая трапеция
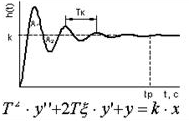
Рисунок 2.4 – Переходная характеристика рулевой трапеции
Колеса
Рисунок 2.5 – Переходная характеристика колес
Рычаг обратной связи
Рисунок 2.6 – Переходная характеристика рычага обратной связи