

41. Недостатки существующих рмс посадки метрового диапазона; микроволновые системы посадки (mls); назначение, состав, размещение, принципы
Недостатки систем метрового диапазона ILS и СП-50:
1.Мал сектор в пределах которого экипаж получает информацию об отклонении от линии курса и глиссады (2-4 град)
2. Неоптимальность траектории захода на посадку для различных типов самолёта
3. Влияние переотражений сигналов радиомаяков систем посадки на положение линии курса и посадки.
Радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными маяками MLS:
- определение самолета по азимуту, углу места и дальности относительно соответствующих маяков и определение положения самолета относительно заданной траектории с точностями и до высот, соответствующими посадочному минимуму, установленному для данного самолета;
- выдачу азимутальной, угломестной и дальномерной информации и информации об отказах для визуальной индикации экипажу и в виде электрических сигналов в другое бортовое оборудование, если эти сигналы используются;
- прием разовых команд (запрет перестройки, воздух — земля, взлет — посадка), выдаваемых другими бортовыми системами, необходимых для обеспечения выполнения оборудованием MLS требуемых функций;
Состав и размещение.
В состав MLS входят 5 маяков: 2 азимутальных (сканирование в горизонтальной плоскости), 1 радио маяк азимута (РМА) для захода на посадку, второй РМА для ухода на второй круг. 2 угломестных РМУМ ( от слов угол места), один формирует линию глиссады, другой линию снижения (радиомаяк выравнивания). дальномерный ДРМ (служет для определения удаления самолёта от торца ВПП.
РМА и РМУМ работают в диапазоне 5,03-5,09 ГГц. Работают по очереди
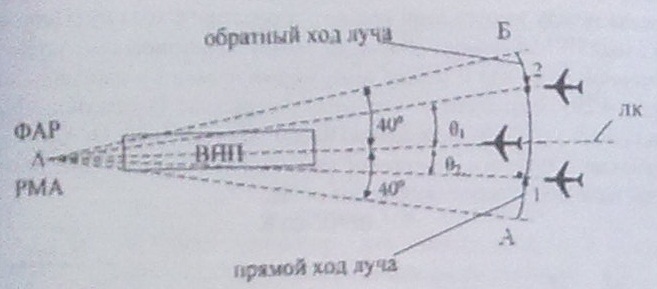
Принцип действия РМА (РМУМ аналогичен, только в вертикальной плоскости)
Антена РМА излучает узкий луч 1-4 град, который сканирует от A до Б (прямой ход луча) а затем от Б до А (обратный). Информация об угловом положении определяется велеченой временного интервала между импульсами прямого и обратного хода луча (они возникают на входе в ПРМ). Сравнивая угловое положение самолёта с угловым положением линии курса (ЛК) находи угловое положениее от ЛК. Также РМА и РМУМ передаёт на самолёт дополнительную закодированную информацию: о размерах ВПП, направления курса посадки, наклоне глиссады, комплектации MLS, размещении р\маяков относительно ВПП, сигналы настройки бортовой аппаратуры по временному интервалу
Система MLS, обладает повышенной точность.
Диапазон частот, МГц:
канал курса (азимута),канал глиссады (угла места) 5031…5090,7
канал дальности (маркерный) 960…1215

42 . Назначение, решаемы задачи, состав оборудования системы раннего предупреждения приближения к земле (egpws, taws), связь с бортовыми системами.
EGPWS,TAWS предназначены для предупреждения экипажа воздушного судна о столкновении с земной поверхностью. Система предупреждает экипаж световой и звуковой и аварийной сигнализацией после чего дает рекомендации экипажу вс при опасном сближении с поверхностью земли!
Для выполнения этой функции TAWS использует информацию о вертикальной скорости, путевой скорости, путевом угле, угле траектории, широте, долготе (по GPS), состоянии шасси, закрылок, температуре воздуха, угла крена, барической высоте и радиовысоте, встроенную базу данных рельефа. состав: 1)Вычислитель – предназначен для автоматического определения этапа полета ВС анализа его текущего и прогнозируемого расположения относительно подстилающей поверхности и препятствий, а также для выдачи предупреждения экипажу об опасных ситуациях, грозящих столкновения ВС с препятствием. Для режимов раннего предупреждения о близости земли вычислитель использует информацию о рельефе и препятствиях из цифровой базы данных о высотах.2)Панель или пульт управления 3) Панорамные индикаторы- Предназначены для отображения подстилающей поверхности земли и препятствий в режиме относительных или абсолютных высот. 4) Светосигнальное табло – Предназначены для представления экипажу ВС сигналов о возникновении таких условий полета, развитие которых может привести к непреднамеренному столкновению ВС с землей, искусственными препятствиями или водной поверхностью.
Связь с бортовыми системами
С радиовысотомером и барическим высотомерами
С системой воздушных сигналов по сигналам возд скорости, абсолют и относительной барической высоты, температуры наружного воздуха.
С центральной гировертикалью по сигналам крена
С Точной курсовой системой по сигналам курса
С системой курс МП-70 по сигналам отклонения от равносигнальных зон курса и глиссады.
С системой МСРП (сигнал аварийного предупреждения)
Датчиками положения шасси и закрылок
С системой управления двигателями
С системой СПУ для выдачи речевых сообщений.