

34. Радиомаячные системы посадки (рмс) метрового диапазона; назначение, решаемы ими задачи, классификация, размещение относительно впп, основные характеристики.
РМС позволяют создавать прямолинейную пространственную траекторию захода на посадку, определять текущее положение самолёта относительно неё, а также прохода двух или трёх точек расположенных на определённом удалении относительно ВПП.
Решает задачу захода на посадку по приборам. В режиме посадка МП-70 решает задачу приёма, преобразования и сравнение сигналов по лепесткам диаграмм направленности антенных систем КРМ и ГРМ, получение на этой основе сигналов постоянного тока Eк и Eг, велечина и полярность котрых зависят от угла и стороны отклонения самолёта от равносигнальных зон курса и глиссады посадки. Задачей МРП является приём и преобразование сигналов посадочных маркерных радиомаяков с целью их выдачи в САС и СПГУ для световой и звуковой сигнализации
РМС классифицируются по возможности захода на посадку при определённых метоеусловиях, различают РМС 1,2 и 3 категории. 1 категория до высоты 60м (это значит что на этой высоте небхидимо принимать решение на уход на второй круг если нет установленнного визуального контакта с ВПП) при видимости ВПП неменее 800м, 2 категория, до высоты 30м и видимости не менее 400м, 3 категория при заначительном ухудшении видимости, или её полного отсутствия.( существует 3 группы ILS 3 категории.
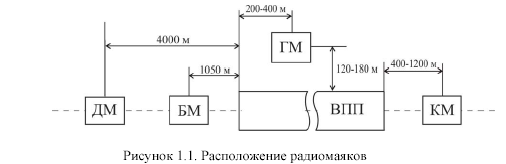
Система посадки включает курсовой маяк (КМ), глиссадный маяк (ГМ), дальний маркерный маяк (ДМ) и ближний маркерный маяк (НМ). Расположение радиомаяков относительно взлетно-посадочной полосы (BIIII) показано на рис. 1.1.
Курсовые радиомаяки РМС метрового работают в диапазоне 108…112 МГц (длина волны около 3м), глиссадные – в диапазоне 328,6…335,4 МГц (длина волны 1м) и маркерные – на частоте 75МГц(длина 4м)
Несущая частота маркерных маяков: дальний-400Гц, средний-1300, ближний 3000Гц.
35. Бортовая аппаратура навигации и посадки: принцип работы в режиме посадки по системе ils (канал курса)
В режиме посадка МП-70 решает задачу приёма, преобразования и сравнение сигналов по лепесткам диаграмм направленности антенных систем КРМ и ГРМ, получение на этой основе сигналов постоянного тока Eк и Eг, велечина и полярность котрых зависят от угла и стороны отклонения самолёта от равносигнальных зон курса и глиссады посадки. Задачей МРП является приём и преобразование сигналов посадочных маркерных радиомаяков с целью их выдачи в САС и СПГУ для световой и звуковой сигнализации
Приемные устройства курсового и глиссадного канала построены по одинаковым схемам и содержат вибраторную антенну, супергетеродинный приемник с двойным преобразованием частоты, амплитудный детектор, разделительные фильтры на 150 и 90 Гц и схему сравнения с выходом на гальванометр с центральным нулевым положением стрелки. Маркерный радиоприемник также собран по супергетеродинной схеме. После демодуляции сигнал разделяется тремя полосовыми низкочастотными фильтрами и подается на различные сигнальные лампочки, общий звонок и головные телефоны
Курсовой радиомаяк имеет антенное устройство, создающее две пересекающиеся диаграммы направленности, излучение по которым отличается частотой модулирующего сигнала. Равносигнальный уровень совмещается с направлением курса посадки. Частота модулирующего сигнала равна 150 Гц справа от курса по направлению захода на посадку и 90 I ц слева. Применена амплитудная модуляция несущей. При отклонении самолёта в лево или право, происходит усилении соответствующего сигнала (становиться преобладающим) что в свою очередь откланяет планку курса.
