

10.2. Радіолокація неперервним сигналом
Найперші РЛС були
саме доплерівськими станціями неперервного
випромінювання.
Спрощену структурну схему такої станції
показано на рис. 10.2. Станція складається
з генератора високочастотних коливань
ГВК, антен для випромінювання Авипр
i приймання Апр сигналів, змішувача
та підсилювача звукових частот ПЗЧ, до
якого приєднано навушники
або вимірювач частоти. Доплерівська
РЛС не виявляє нерухомі предмети,
тобто вона одночасно є селектором
рухомих об'єктів на фоні місцевих
предметів. Для вcix об'єктів, що рухаються,
частота відбитого сигналу залежить
від значення i напрямку радіальної
складової їхньої швидкості
![]() .
Визначається вона за формулою (знак
«+» застосовується для об'єктів, які
наближаються до спостерігача)
.
Визначається вона за формулою (знак
«+» застосовується для об'єктів, які
наближаються до спостерігача)
![]() (10.10)
(10.10)
де с = 3•108 м/с – швидкість поширення сигналу
Відбитий сигнал приймається антеною i підводиться до змішувача. Через паразитні зв'язки сюди ж надходить частина потужного сигналу випромінювання. Відбувається нелінійне перетворення двох сигналів, унаслідок чого ФНЧ виділяє сигнал різницевої частоти, яка є доплерівською частотою. Цей сигнал підсилюється i подається на вимірювач частоти, проградуйований в одиницях швидкості. Якщо, наприклад, f0 = 10 ГГц (λ. = Зсм), а швидкість автомобіля 15 м/с, то доплерівська частота
![]()
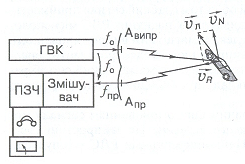
Рис. 10.2. Спрощена структурна схема
РЛС неперервного випромінювання
Допплерівський метод вимірювання швидкості використовують у сучасних радарах. Вимірювач частоти в цьому разі дає цифровий код, який за допомогою формувача літерно-цифрової інформації виводять на
основний екран РЛС поруч iз позначкою об'єкта, що спостерігається.
Рис. 10.3. Ілюстрація принципу вимірювання РЛС неперервного випромінення
Для того щоб такий
радар вимірював віддаль, у нього треба
ввести ЧМ
сигналу, який випромінюється. Нехай
частота генератора  змінюється
пилкоподібно
(рис. 10.3). Частота сигналу, що відбивається,
теж буде змінюватись,
але iз запізненням на час τ поширення
хвилі до об'єкта i назад.
Якщо в деякий момент t1
частота сигналу передавача дорівнює
f1
то відбитий
сигнал має майже ту саму частоту (з
урахуванням частоти
Доплера). Проте частота генератора на
момент часу t1+
τ
вже зміниться до значення f1
+ Δf
і на виході змішувача буде виділятися
сигнал із частотою Δf,
який містить
інформацію про віддаль. Ця частота буде
тим вищою, чим далі знаходиться
об'єкт.
змінюється
пилкоподібно
(рис. 10.3). Частота сигналу, що відбивається,
теж буде змінюватись,
але iз запізненням на час τ поширення
хвилі до об'єкта i назад.
Якщо в деякий момент t1
частота сигналу передавача дорівнює
f1
то відбитий
сигнал має майже ту саму частоту (з
урахуванням частоти
Доплера). Проте частота генератора на
момент часу t1+
τ
вже зміниться до значення f1
+ Δf
і на виході змішувача буде виділятися
сигнал із частотою Δf,
який містить
інформацію про віддаль. Ця частота буде
тим вищою, чим далі знаходиться
об'єкт.
Радіолокатори з неперервним сигналом, на відміну від імпульсних, не мають «мертвої зони», тобто вони здатні вимірювати віддаль від нульового її значення. Тому вони широко використовуються в авіації для вимірювання висоти. Kpiм того, такі радари забезпечують дуже високу точністъ вимірювання віддалі та відносної швидкості. Через це до появи оптичної i рентгенівської локації ix застосовували для забезпечення автоматичного стикування космічних об'єктів. Однак для радолокації на великі віддалі (сотні кілометрів) РЛС з неперервним сигналом потребують дуже великої середньої потужності генератора. Зважаючи на це найпоширенішим став імпульсний cnoci6 радіолокації.