

3.3. Измерение крутящего момента на валу, соединяющем двигатель с тормозом (динамометрические муфты).
Общие сведения.Область применения.Типы динамометрических муфт в зависимости от основных физических величин, изменяющихся при закручивании вала (3). Как разделяются торсионные динамометры в зависимости от способа измерения угла закручивания вала (4)?

Методы измерения углового смещения могут быть различными: 1. индуктивные. 2. емкостные. 3. фотометрические. 4. фазометрические.
Требования к динамометрическим муфтам. Что необходимо учитывать при использовании динамометрических муфт при измерении крутящего момента в процессе разгона двигателя (покажите, как это реализовать практически)?
Необходимая точность измерения (0,5% для традиционных испытаний ДВС и 2,0% для измерений на транспортном средстве (на объекте) или на неустановившихся режимах.
Возможность работы в требуемом диапазоне частот вращения (надёжность и инвариантность показаний к частоте вращения).
Линейность характеристики и требуемый диапазон измерений.
Надёжность передачи сигнала с вращающегося вала.
Возможность работы при повышенных температурах (надёжность и инвариантность показаний к температуре).
Возможность работы в условиях вибраций вала и осевых смещений валов (надёжность и инвариантность показаний к вибрациям и осевым смещениям валов).
Минимальные размеры из-за ограниченных возможностей размещения.
Возможность работы в условиях загрязнений окружающей среды (нечувствительность к загрязнениям среды).
Достаточная мощность выходного сигнала.
Отработанность вторичной измерительной аппаратуры.
Минимальное влияние наводок и внешних электрических полей.
Фазочувствительность, т.е. изменение знака выходного сигнала при изменении направления действия крутящего момента.
Возможность или простота реализации градуировки при неподвижном вале.
Стабильность характеристик в процессе эксплуатации и в процессе производства.
Тензорезистивные динамометры: принцип действия, мера (измеряемая величина, формула), размещение тензорезисторов на валу, схема включения. Влияющие факторы.
В
тензорезистивных динамометрах мерой
Мк
является деформация поверхности УЭ,
вызванная наличием касательных напряжений
τ. С помощью тензорезисторов (ТР) эта
деформация ε преобразуется в изменение
активного сопротивления ТР R
и далее в электрический сигнал.
Максимальная величина касательных
напряжений τ, возникающих при закручивании
вала, составляет
![]() ,
где W
– момент сопротивления при кручении
вала, м3.
Наибольшая чувствительность достигается
при использовании полного моста, в
котором ТР, образующие противоположные
плечи моста, имеют одинаковые деформации.
Для этого на одной стороне вала под
углом 450
к образующей и 900
друг к другу размещаются ТР. Аналогичным
образом размещаются ТР на другой стороне
мерного участка вала.
,
где W
– момент сопротивления при кручении
вала, м3.
Наибольшая чувствительность достигается
при использовании полного моста, в
котором ТР, образующие противоположные
плечи моста, имеют одинаковые деформации.
Для этого на одной стороне вала под
углом 450
к образующей и 900
друг к другу размещаются ТР. Аналогичным
образом размещаются ТР на другой стороне
мерного участка вала.
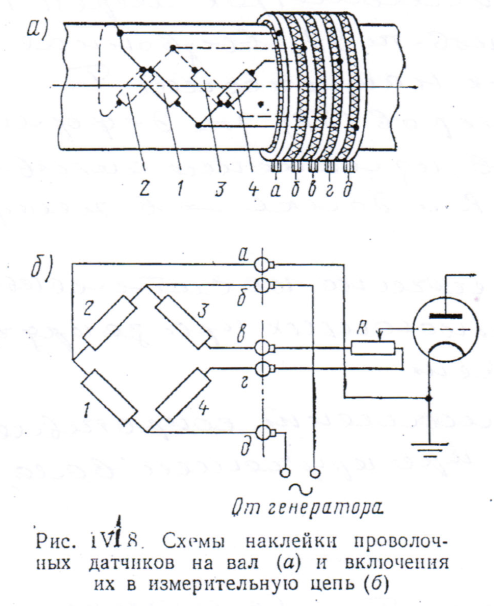
Наибольшая чувствительность достигается при использовании полного моста, в котором ТР, образующие противоположные плечи моста, имеют одинаковые деформации (1 и 4). Для этого на одной стороне вала под углом 450 к образующей и 900 друг другу размещаются ТР. Аналогичным образом размещаются ТР на другой стороне мерного участка вала (2 и 3). Схема полного моста (наиболее часто применяемая в настоящее время) обеспечивает: 1. увеличение чувствительности (в 4 раза по сравнению с полумостом). 2. Уменьшение влияния деформаций изгиба вала. 3. Уменьшение влияния деформаций растяжения – сжатия в осевом направлении. 4. Обеспечивает схемную температурную компенсацию. 5. В значительной мере (например по сравнению с полумостом) уменьшение влияния переходного сопротивления скользящих контактов токосъёмника (в предположении идентичности переходных сопротивлений а,б,в,г).
Каким образом и какие геометрические размеры мерного участка вала влияют на чувствительность тензодинамометров? Способы передачи сигнала с вращающегося вала: их преимущества и недостатки. Преимущества и недостатки тензодинамометров.
Индуктивные динамометры: принцип действия, мера (измеряемая величина, формула), размещение индуктивных преобразователей на валу, схема включения. Каким образом и какие геометрические размеры мерного участка вала влияют на чувствительность динамометров подобного типа? Передача сигнала с вращающегося вала. Влияющие факторы. Преимущества и недостатки.
Принцип действия основан на изменении индуктивности катушки при введении в неё (или частичного выведения из неё) ферромагнитного сердечника. Вал, через который осуществляется передача Мк, имеет мерных участок уменьшенного диаметра. Крайнее сечение вала образуют базу измерений. С одним концом базы измерения жёстко связаны катушки индуктивности, оси которых перпендикулярны оси вала. Вдоль оси катушек могут перемещаться ферромагнитные сердечники, которые жёстко связаны со вторым концом базы измерения.
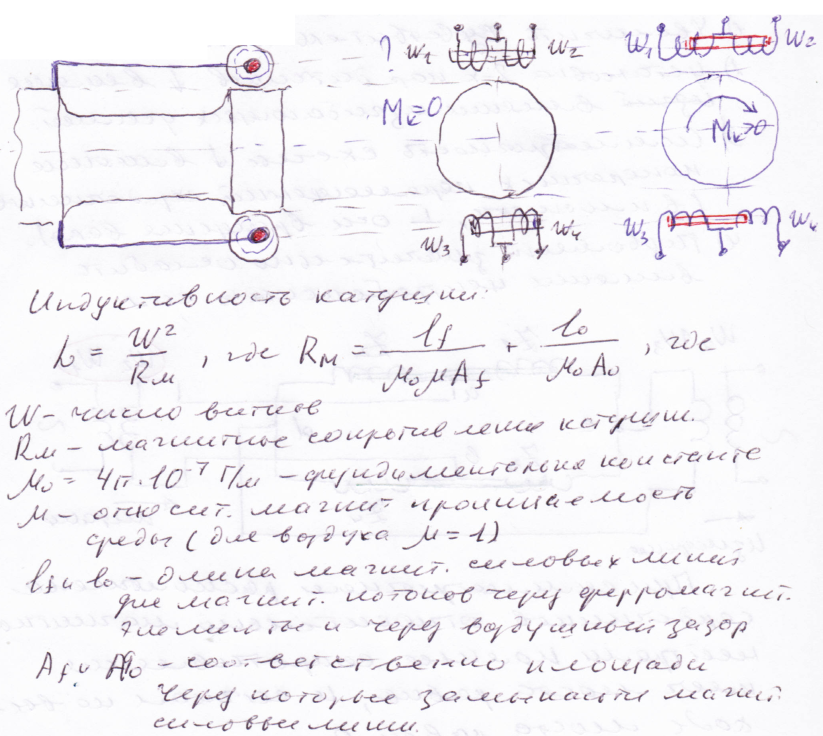
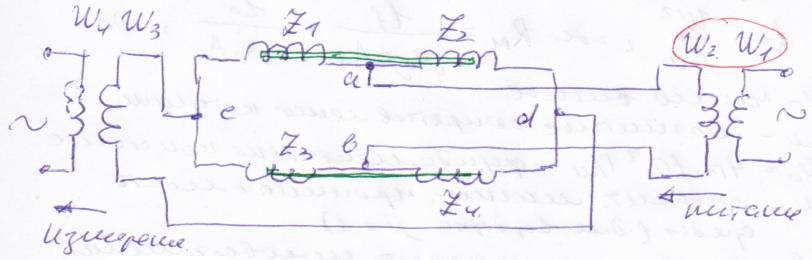
В данном случае, однако, индуктивный датчик является датчиком соленоидного типа. Его индуктивность зависит от соотношения длин катушек. Индуктивные датчики включены по дифференциальной схеме. Сам первичный преобразователь включает в себя две индуктивные катушки, имеющие общую точку. При симметричном расположении сердечника магнитные потоки в обеих катушках одинаковы. Как правило, устанавливаются 2 пары таких катушек, по углом 1800, образуя в конечном счёте полный индуктивный мост. Это позволяет увеличить чувствительность; установка двух пар датчиков уменьшает влияние изгибающих усилий; симметричность схемы уменьшает влияние поперечных перемещений сердечников (в плоскости, перпендикулярно оси вращения); позволяет значительно ослабить влияние центробежных сил.
Достоинства индуктивных преобразователей моментов: 1. Низкое выходное сопротивление и, как следствие этого, низкий уровень помех. 2. Высокая чувствительность. 3. Сравнительно высокая мощность выходного сигнала, что позволяет осуществлять передачу с вращающегося вала с помощью вращающихся трансформаторов. 4. Устойчивость к изгибу и поперечным смещениям. 5. Устойчивость к воздействию окружающей среды (загрязнённость, влажность, замасливание). 6. Сравнительная простота измерительной аппаратуры. 7. Фазочувствительность и возможность градуировки при неподвижном вале. 8. Возможность работы в широком диапазоне частот вращения. Недостатки: 1. Наличие вращающихся обмоток и сердечников, что уменьшает надёжность. 2. Влияние температуры.
Ёмкостные динамометры: преимущества и недостатки по сравнению с индуктивными.
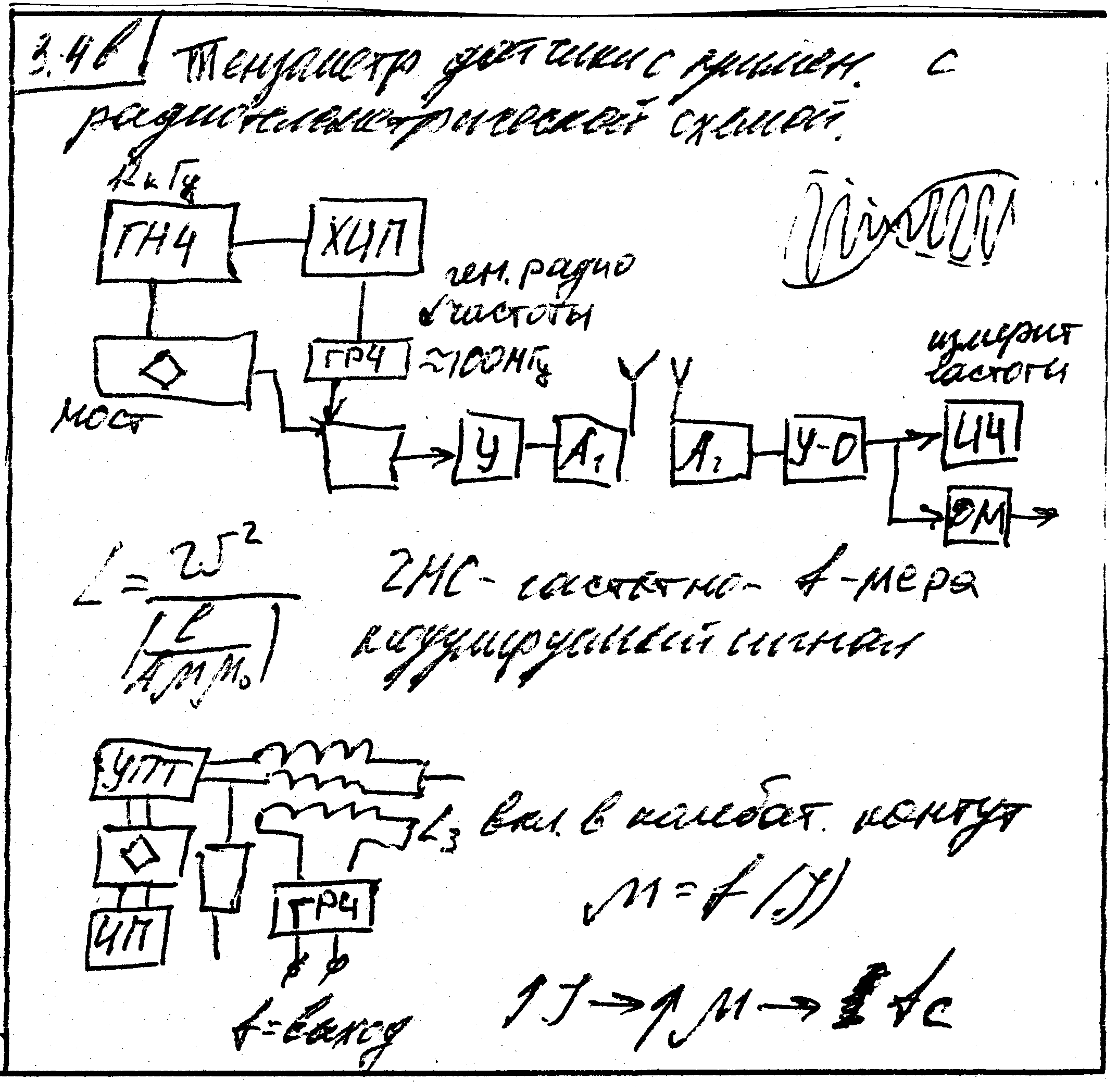
Частотный способ передачи сигнала предпочтителен, т.к. при высокой частоте колебаний контур (частоты генератора) порядка 500кГц переходное сопротивление при передаче сигнала не отражаются на результатах. Т.о. емкостные датчики фактически не имеют токосъёмников. Недостатки: 1. Сильное влияние на величину ёмкости внешних факторов (температура, влажность, запылённость). 2. Сильное влияние ёмкости соединительного кабеля. 3. Сложность измерительной схемы. 4. В простейшем случае они не являются фазочувствительными.
Фазометрические динамометры с индукционными, ёмкостными или фотоэлектрическими преобразователями. Конструкция: основные элементы и их назначение.
Принципиальная схема включения с аналоговым выходом: основные элементы и их назначение. Временные диаграммы работы (принцип формирования выходного сигнала). Измеряемая величина (мера) и способ измерения её значения. Докажите, что значение выходного параметра прямо пропорционально крутящему моменту. Источники погрешностей.
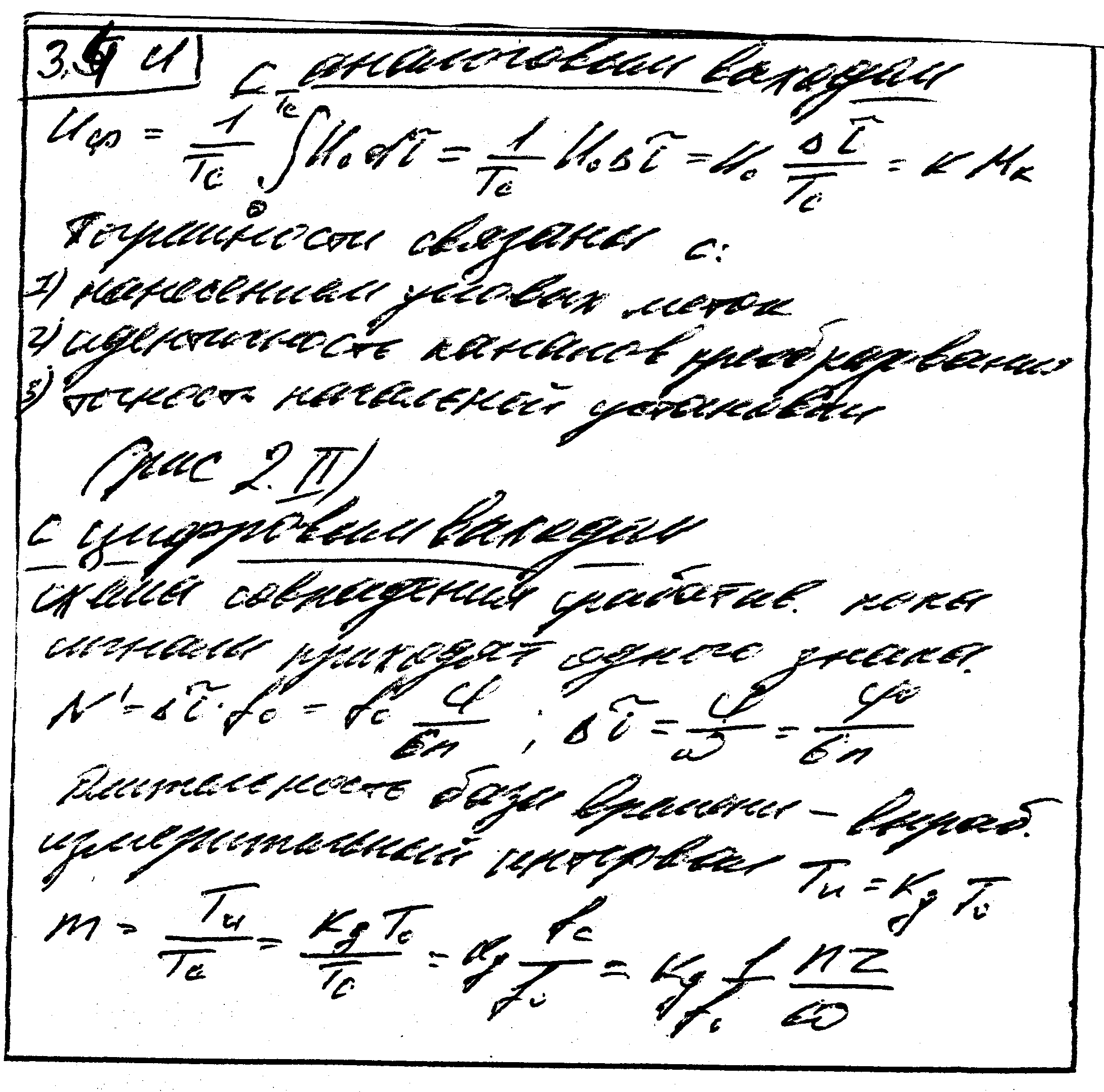
Сигналы U1 и U2 с ДУМ-1 и ДУМ-2 поступают на вход усилителей-ограничителей УО-1 и УО-2. Последние усиливают и ограничивают сигналы кодовых меток с целью более точного определения моментов перехода этих сигналов через нулевые значения. Напряжение U3 и U4 на выходе УО близки к прямоугольникам и имеют крутые передние и задние фронты. Эти сигналы дифференцируются с помощью дифференцирующих устройств (ДУ-1 и ДУ-2) и превращаются в остроконечные импульсы U5 и U6. Выпрямительные (вентильные) элементы пропускают только положительные импульсы. С помощью триггеров Т-1 и Т-2 остроконечные импульсы превращаются в прямоугольные импульсы (U7 и U8) с постоянной амплитудой и длительностью. Эти импульсы поступают в смеситель или триггер временного сдвига (ТВС), который формирует на выходе (U9) прямоугольные импульсы с напряжением (амплитудой U0) и длительностью Δτ, равной длительности временного сдвига сигналов кодирующих меток с обоих сечений базы времени. Эти импульсы имеют период Тс, равный периоду следования импульсов кодовых меток. После интегрирования сигнала U9 с помощью интегратора (U) на выходе появляется напряжение U10 пропорциональное отношению фазового сдвига Δτ к периоду следования импульсов Тс, т.о. получаем информативный сигнал пропорциональный углу закручивания вала φ и числу кодовых меток Z, что полностью отражает величину Мк.
Источники погрешностей: 1. Неточность первоначальной (НУ) установки меток углов на концах базы измерения. 2. Неидентичность нанесения кодовых меток (неточность деления) (НИ ДПУ). 3. Неидентичность каналов преобразования (ДУМ-УО-ДУ-Т) (НИКП). 4. Нестабильность крутизны фронтов запускающих импульсов (U7, U8).
![]()
Принципиальная схема включения с цифровым выходом: основные элементы и их назначение. Временные диаграммы работы (принцип формирования выходного сигнала). Измеряемая величина (мера) и способ измерения её значения. Докажите, что значение выходного параметра прямо пропорционально крутящему моменту. Основные источники погрешностей цифровой схемы регистрации крутящего момента фазометрическим методом.
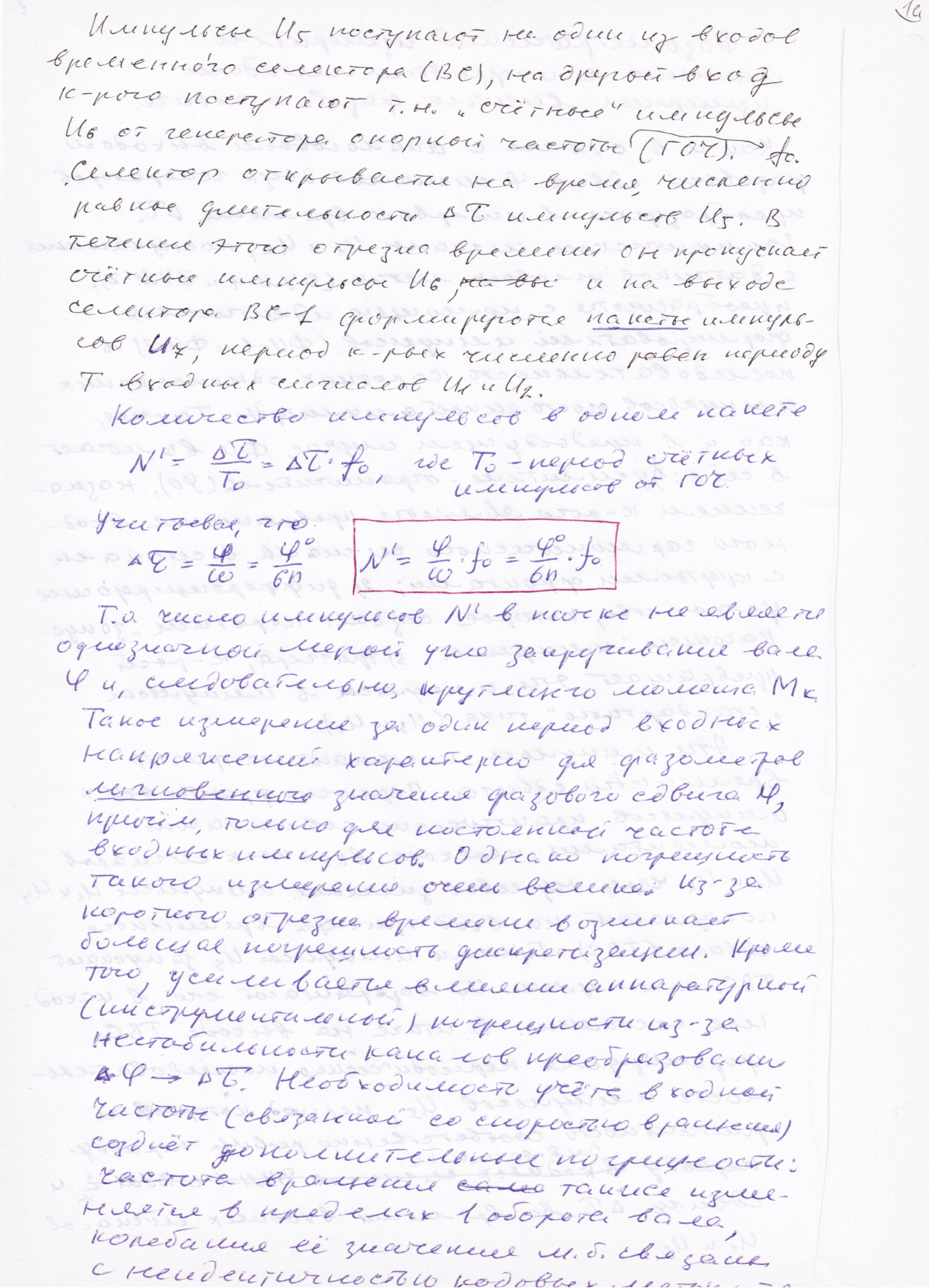
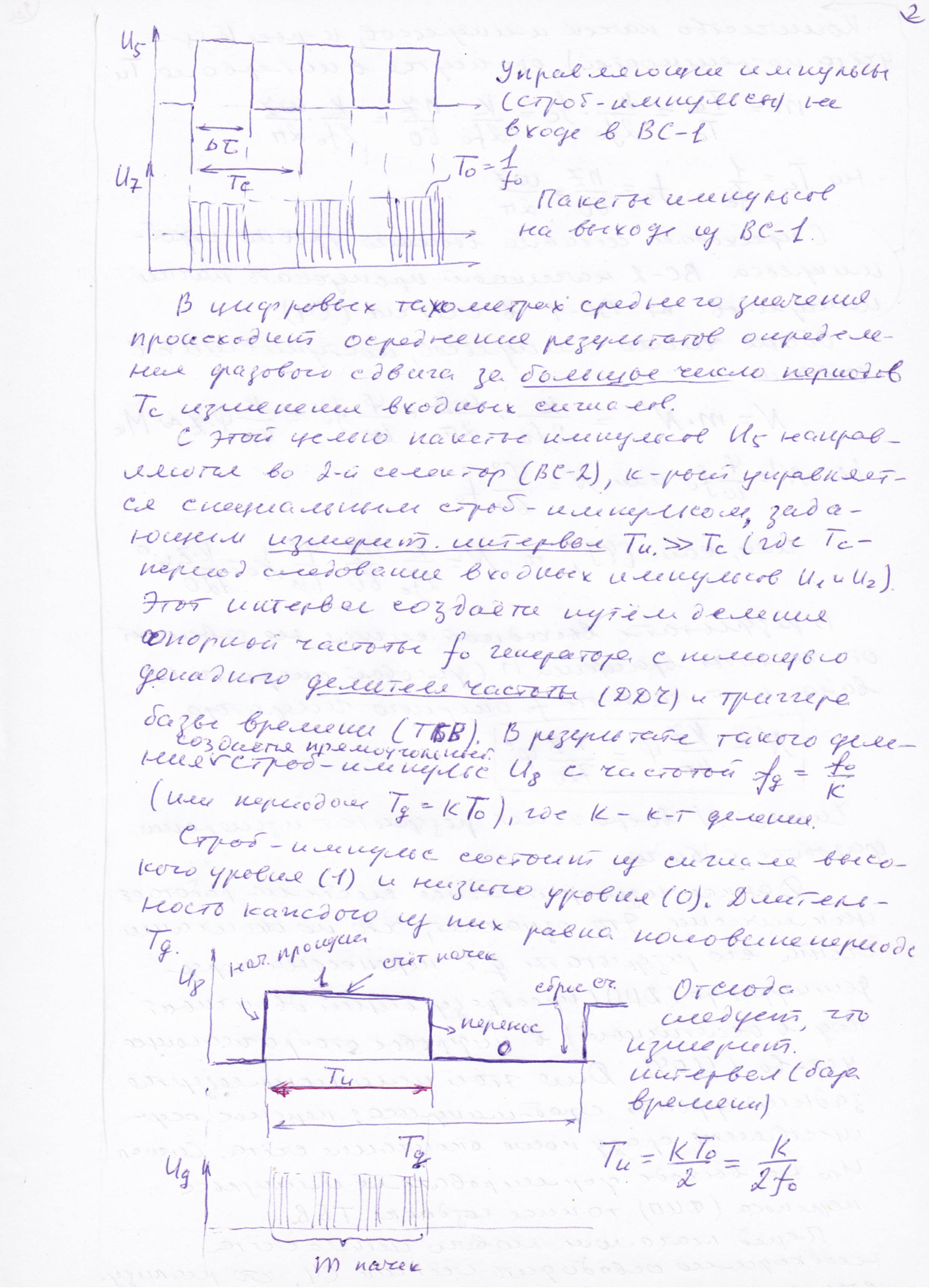
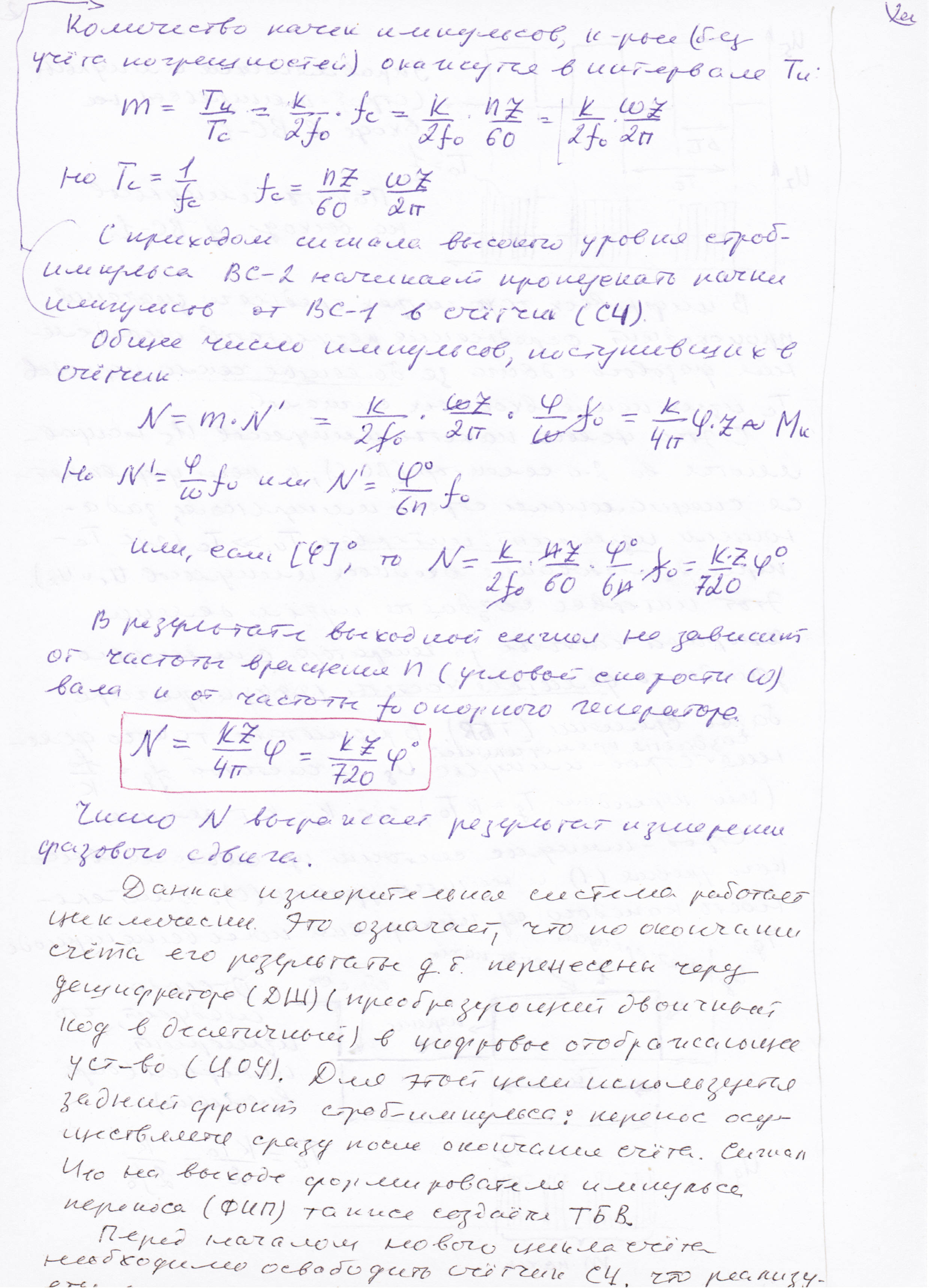
Погрешности измерения фазового сдвига могут быть разделены на две группы: 1. погрешность квантования, 2. инструментальная погрешность. Погрешность квантования имеет две составляющие: 1. Погрешность квантования измерительного интервала Δτ, пропорционального фазовому сдвигу сигналов, квантованными импульсами ГОЧ с частотой f0. 2. Погрешность квантования измерительного интервала Ти (базы времени) пачками импульсов длительностью Δτ.
Особенности конструктивного исполнения. Реализация возможности градуировки при неподвижном вале или проведения измерений на малых частотах вращения. Преимущества и недостатки.