

2.3. Электрические тормоза на базе машин постоянного тока (мпт).
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
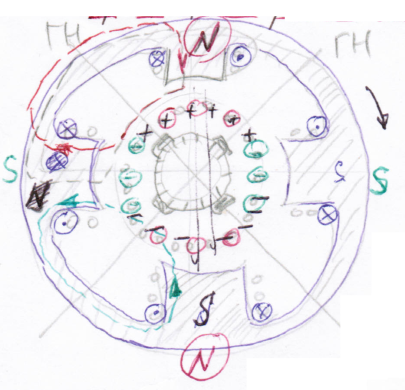
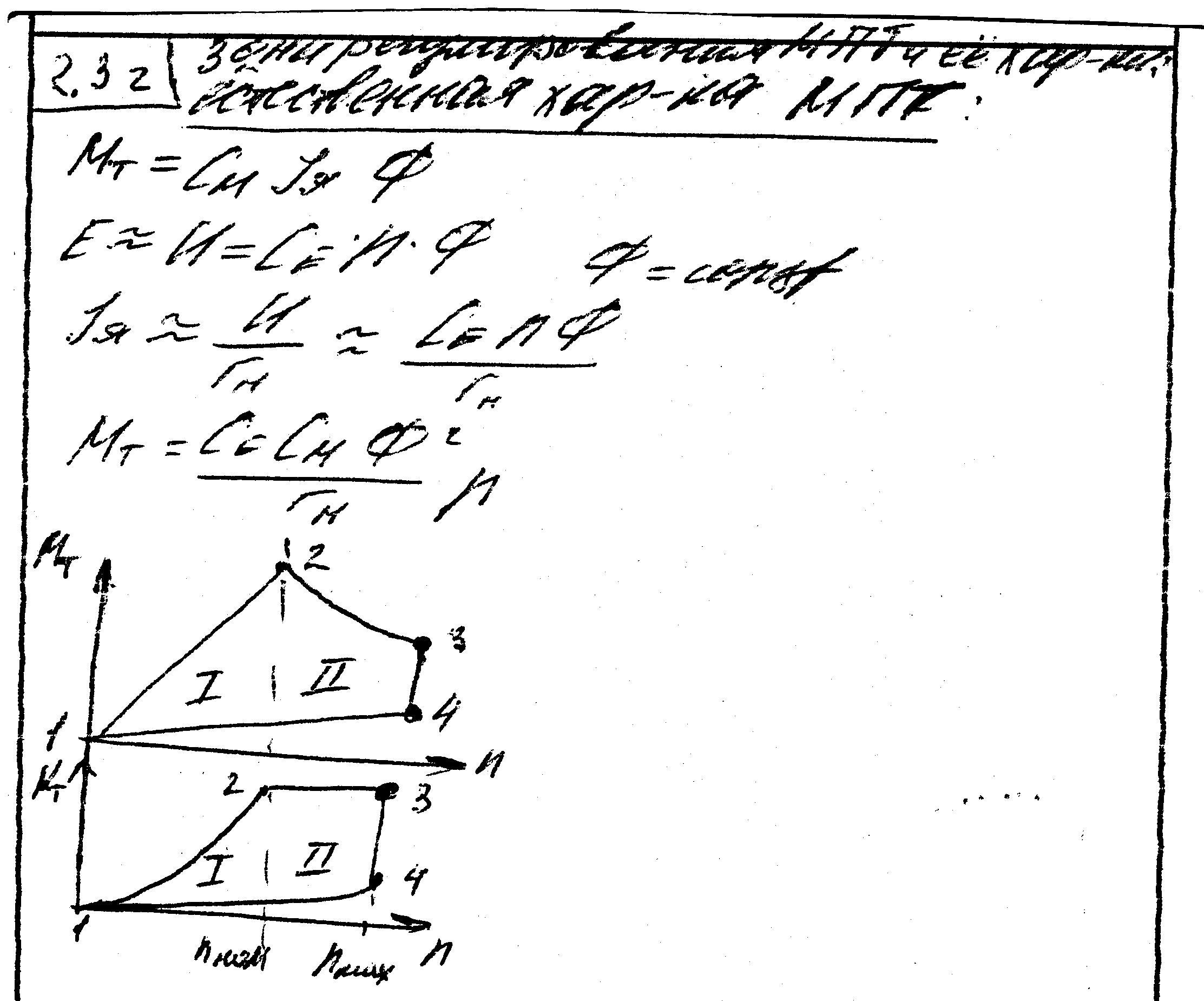
Принцип работы МПТ. Основные элементы МПТ, их назначение.
![]()
На неподвижной части МПТ расположены полосы и обмотки возбуждения (ОВ). Обмотки соединены так, чтобы при прохождении по ним тока полосы приобретали чередующуюся полярность. На вращающейся части расположена обмотка, в которой индуцируется ЭДС. Поэтому вращающаяся часть называется якорем. От обмотки якоря идут ответвления к коллектору, который представляет собой цилиндрическое тело, состоящее из изолированных медных пластин. Обмотка имеет большое число секций, каждая из которых ответвляется и следующим друг за другом коллекторным пластинкам.
Электродвижущая сила (ЭДС) обмотки якоря.
При вращении якоря в проводниках его обмотки наводится ЭДС (точнее в проводниках, лежащих на внешней поверхности сердечника) e = B*l*V, [B] Тл (Тесла). В обмотке якоря наводится переменное ЭДС, т.к. каждый проводник проходит полосы разной полярности. Для выпрямления ЭДС используется коллектор, с которым соприкасаются щётки. Последние устанавливаются в тех местах, где ЭДС меняет направление, т.е. в середине межполюсного промежутка.

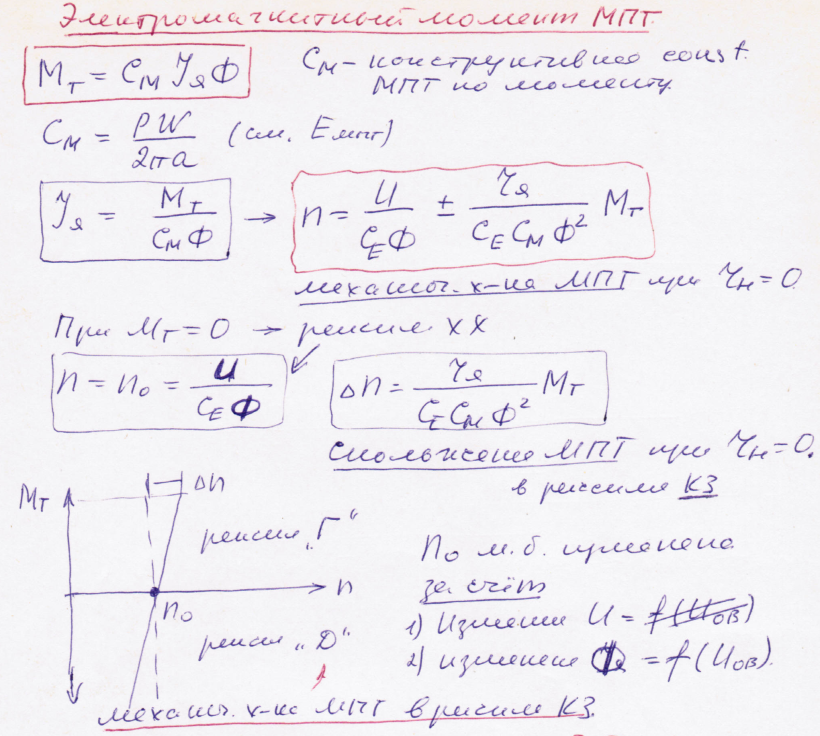
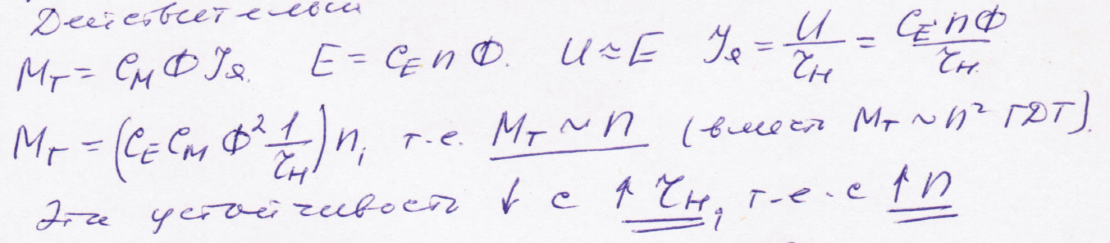
ЭДС обмотки якоря: 1. E = cE*n*Ф, где сЕ – конструктивная постоянная МПТ. 2. сЕ = Р*W/(60a), где Р – число нар полюсов, W – общее число активных проводников якоря, а – число параллельно работающих витков якоря, Ф – поток полюса якоря. 3. n = E/(cE*Ф).
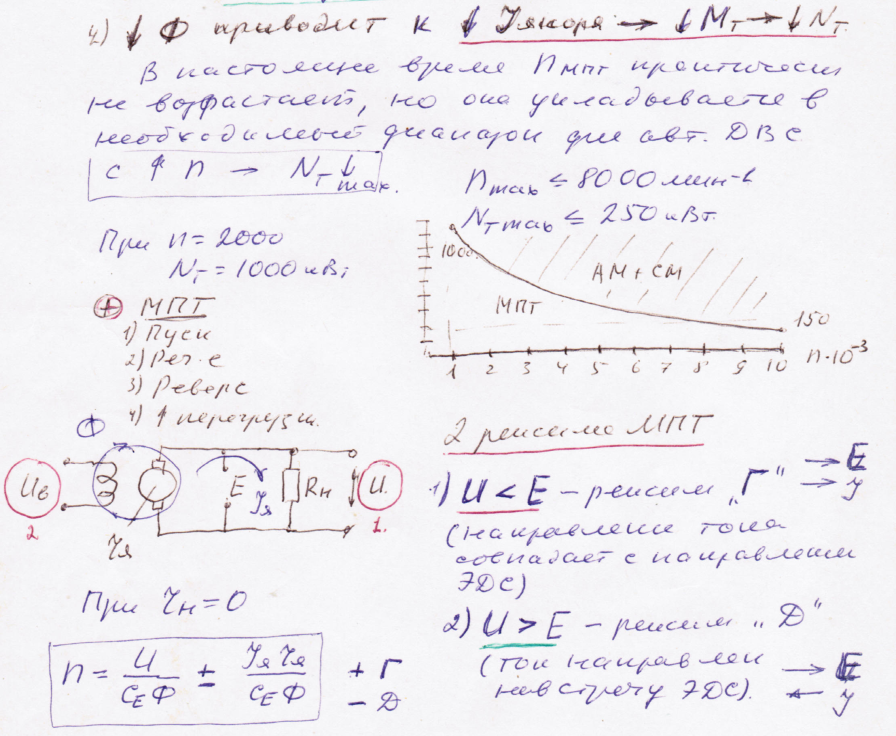
От чего зависит быстроходность МПТ (3)? Чем она ограничивается (3)? Электромагнитный момент МПТ. «Скольжение» МПТ при изменении внешней нагрузки. Частота вращения МПТ в режиме генератора и в режиме двигателя: Соотношение ЭДС и напряжения на этих режимах. Механическая характеристика МПТ при работе с внешней активной нагрузкой: возможности регулирования и способ регулирования. Возможно ли при этом промежуточные нагрузочные режимы?
Из выражения для Е следует: 1. для увеличения быстроходности машины, надо увеличить Е (увеличить разность напряжений между коллектором и щётками) (Е = 500В – граница… увеличение Е до 800В). 2. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения Р, но увеличивается нагрузка на каждую щётку. 3. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения U (число витков), но увеличиваются коммутационные явления между ламелями коллекторов.
Недостатки (3) и область использования данного метода.
Выводы: 1. Необратимые потери энергии, её преобразование в тепло и рассеивание её в окружающую среду. 2. Более низкая, как правило, устойчивость режима по сравнению с ГДТ.
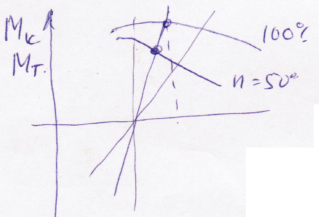
3. Неудобства при снятии НХ ДВС: любое изменение нагрузки приводит к значительным изменениям скоростного режима системы МПТ-ДВС. Это изменение тем больше, чем выше n, что требует перенастройки тормоза.
Область применения: 1. обкатка ДВС после ремонта; 2. приёмо-сдаточные испытания.
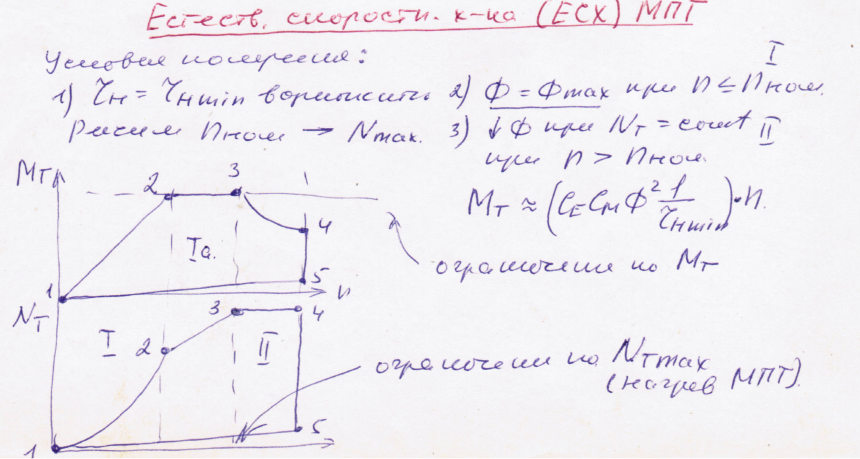
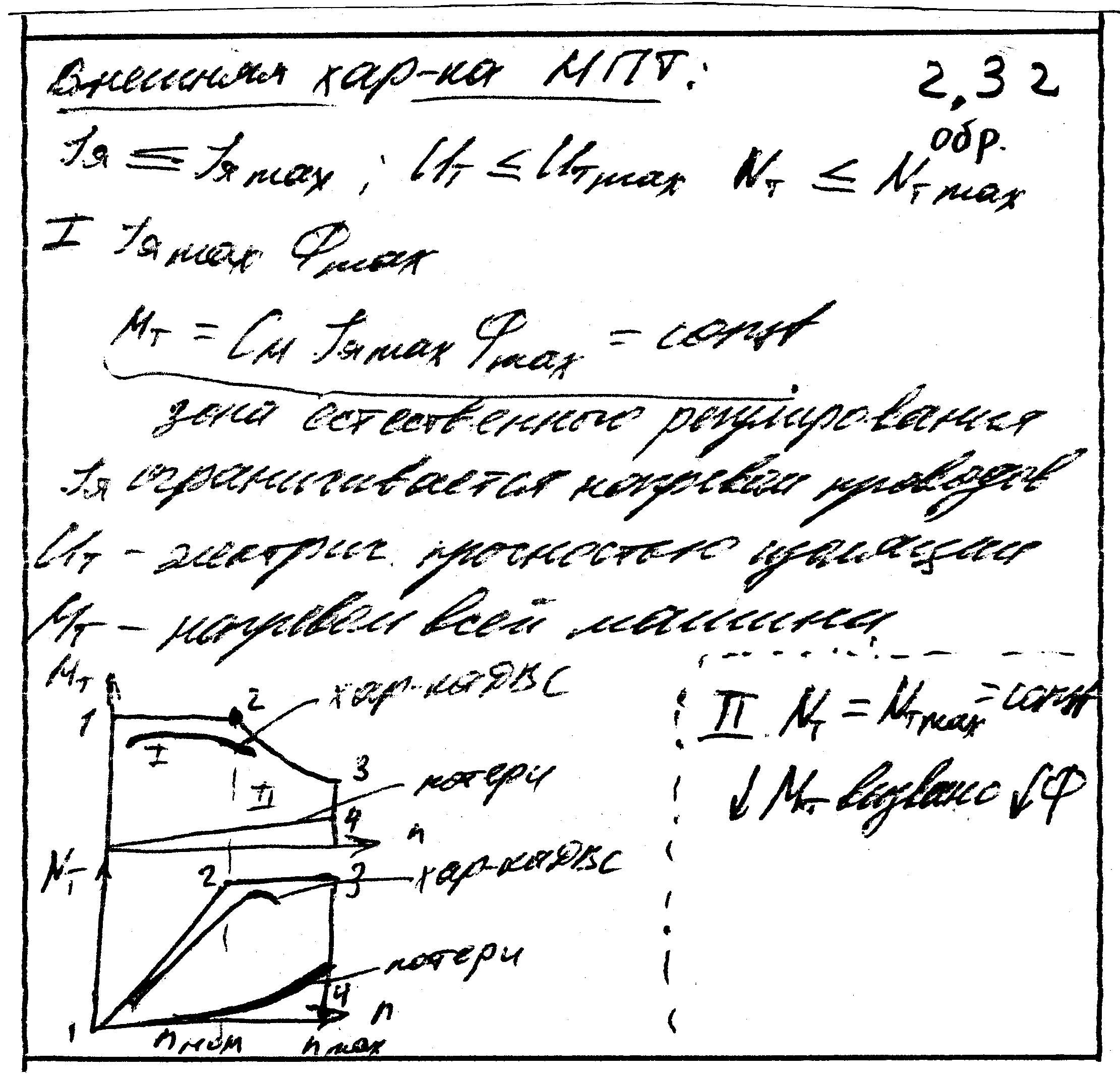
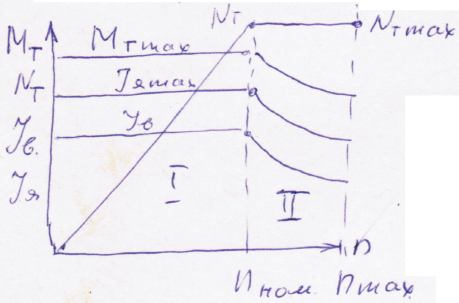
Естественная характеристика МПТ: условия снятия, основные ограничения, зависимость тормозного момента (Мт) и поглощаемой мощности (Nт) от частоты вращения (n). Внешняя характеристика МПТ: условия снятия, основные ограничения, зависимость тормозного момента (Мт) и поглощаемой мощности (Nт) от частоты вращения (n).
Сравните естественную и внешнюю характеристики МПТ с точки зрения согласования характеристик ДВС и тормоза. Номинальная и максимальная частота вращения МПТ.
Зоны регулирования МПТ: и способы регулирования МПТ в каждой из них. Сравните между собой одно-и двухзонные МПТ с позиций соответствия их характеристик характеристике испытуемого ДВС и качества регулирования.
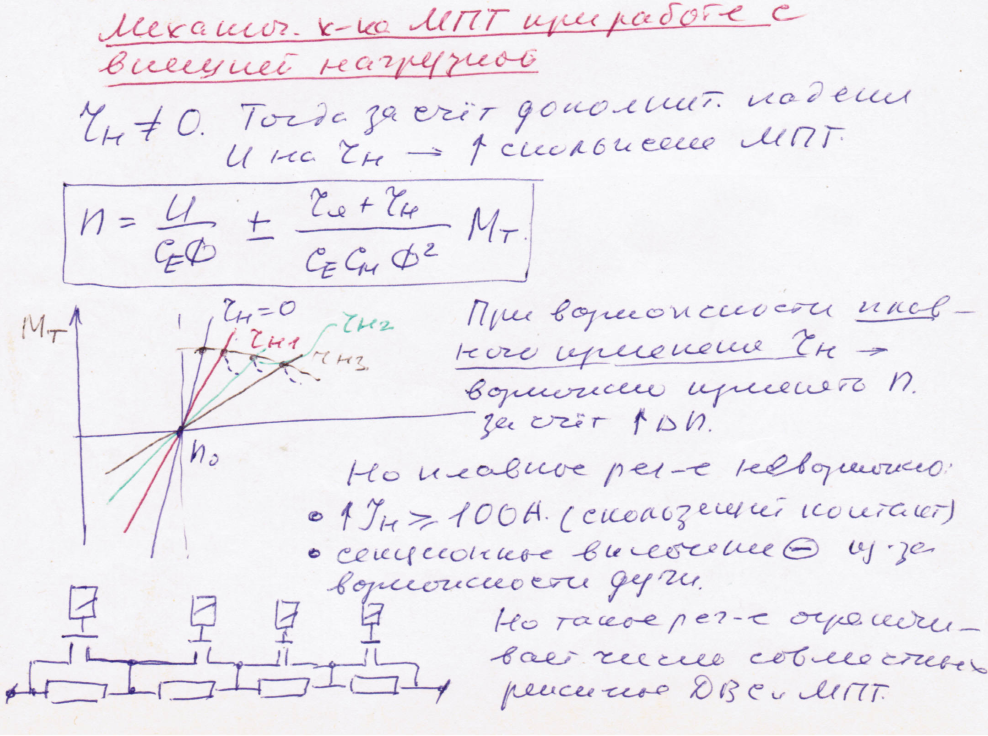
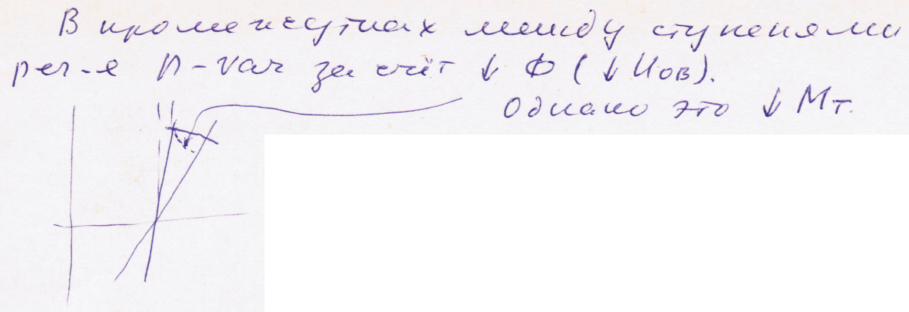
МПТ может регулироваться 2мя путями: 1. Изменением внешней нагрузки при max возбуждении (Ф = Фmax), что соответствует Мтmax, величина которого ограничивается max током якоря Iяmax.
2. при n > nном регулирование возможно только при сохранение NTmax = const, что возможно с уменьшением MT за счёт уменьшения Ф (что достигается уменьшением тока возбуждения в ОВ). Эта зона регулирования называется искусственной, а МПТ, работающими по такой схеме, называется двухзонными (в отличие от однозонной, когда n < nном). Во 2й зоне ухудшается качество регулирования.
Система “генератор-двигатель” (система Леонарда или система Г-Д). Принципиальная схема, основные элементы.
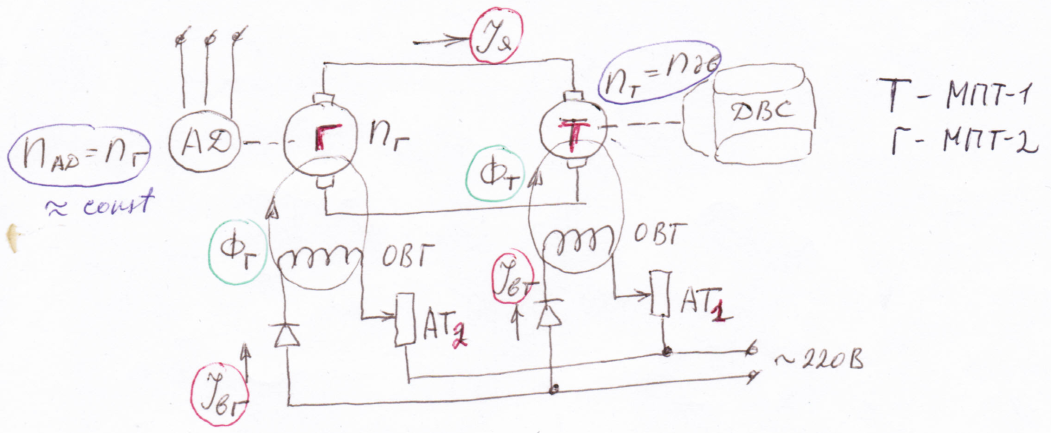
Эта схема включает 2 МПТ с независимым возбуждением. Одна из них (МПТ-1) жестко связана с КВ ДВС и условно названа тормозом Т. Тормоз электрически связан с машинным преобразователем энергии (умформер). Последняя состоит из МПТ-2, которая условно названа генератором Г, и асинхронного двигателя (АД), валы которых соединены друг с другом муфтой. Умформер (генератор, соединенный с АД) обеспечивает преобразование 3х фазного тока в постоянный и наоборот. Автотрансформаторы АТ-1 и АТ-2 предназначены для регулирования тока возбуждения в обмотках возбуждения генератора и тормоза (ОВГ и ОВТ). Практически это осуществляется одной рукояткой, связанной с АТ-1 и АТ-2 ОВГ и ОВТ, но последовательность управления этими АТ небезразлична.
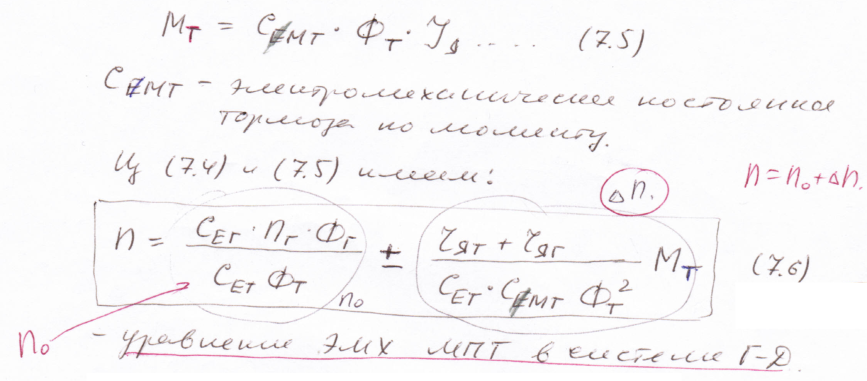
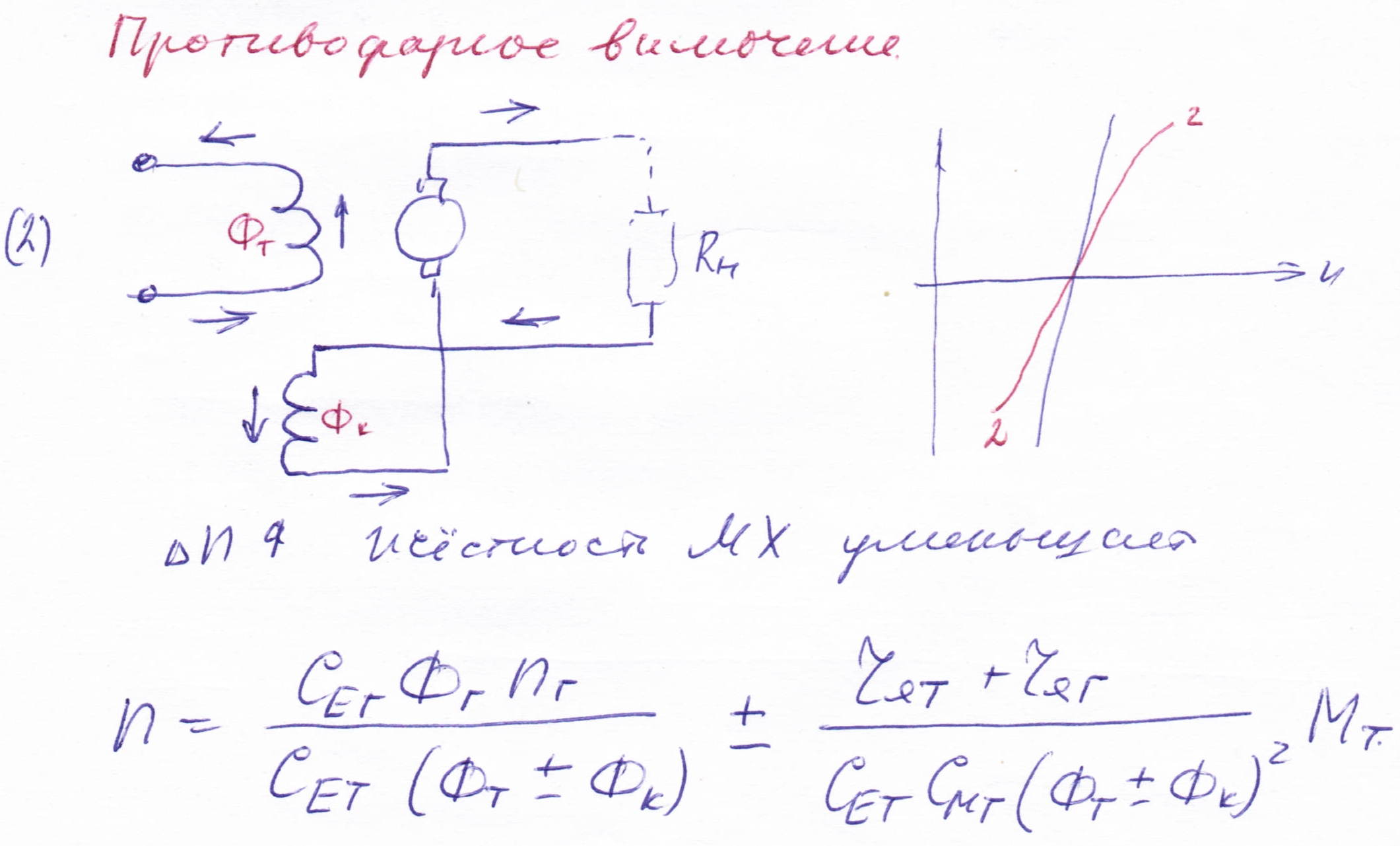
Уравнение механической характеристики МПТ в составе системы Г-Д (вывод формулы). Каким образом осуществляется запуск системы Г-Д?
МПТ-1 работает в работает в режиме генератора (Uт < Eт), а МПТ-2 в режиме электродвигателя (Uг > Eг). Напряжение на зажимах тормоза и генератора в этом случае определяются:
![]()
Сет и Сег – электромеханические постоянные тормоза и генератора. nт (nдвс) и nг (nам) – частота вращения тормоза и генератора. Фт и Фг – магнитные потоки, возбуждаемые в ОВТ и ОВГ. Jя – ток якоря в цепи Г-Д. rят и rяг – внутренние сопротивления якоря тормоза и генератора. Используя очевидное равенство:

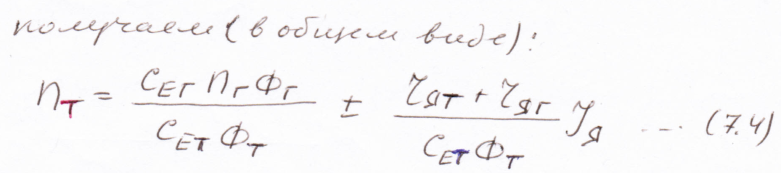
Знак + относится к случаю торможения ДВС (к работе тормоза в режиме генератора), а знак – к режиму работы тормоза в качестве электродвигателя. Ток в цепи якоря связан с величиной поглощаемого момента Мт
Каким образом осуществляется запуск ДВС с помощью МПТ в данной системе?
При запуске с помощью МПТ необходимо: создать max крутящий момент на тормозе, для чего необходимо создать максимальное возбуждение на ОВТ (Фт – max); обеспечить плавное трогание ДВС с места (плавное нарастание тока якоря), для чего следует создать минимальное напряжение на ОВГ. Т.о. проворачивание ДВС при запуске осуществляется увеличением напряжения на ОВГ и, следовательно, увеличением тока якоря и Мт.
Каким образом осуществляется переход с одного скоростного режима на другой (например, при снятии внешней ВСХ)?
Переход тормоза с режима проворачивания ДВС на режим его торможения (нагружения) происходит автоматически: достаточно включить подачу топлива (в дизелях) или зажигания (в ДсИЗ). Тогда тормоз (Т) переходит из двигательного режима в генераторный, а генератор (Г), наоборот, переходит в режим электродвигателя, вращая вал АМ.
Чем обеспечивается высокая жёсткость механической характеристики МПТ в системе Г-Д?
Применение
более мощных МПТ, которые при поглощении
меньшей мощности имеют меньшее скольжение.
Однако также МПТ имеют меньшую
быстроходность, из-за увеличенной массы.
Причём уменьшение
![]() приводит к уменьшению
приводит к уменьшению
![]() относительно сопротивления якоря.
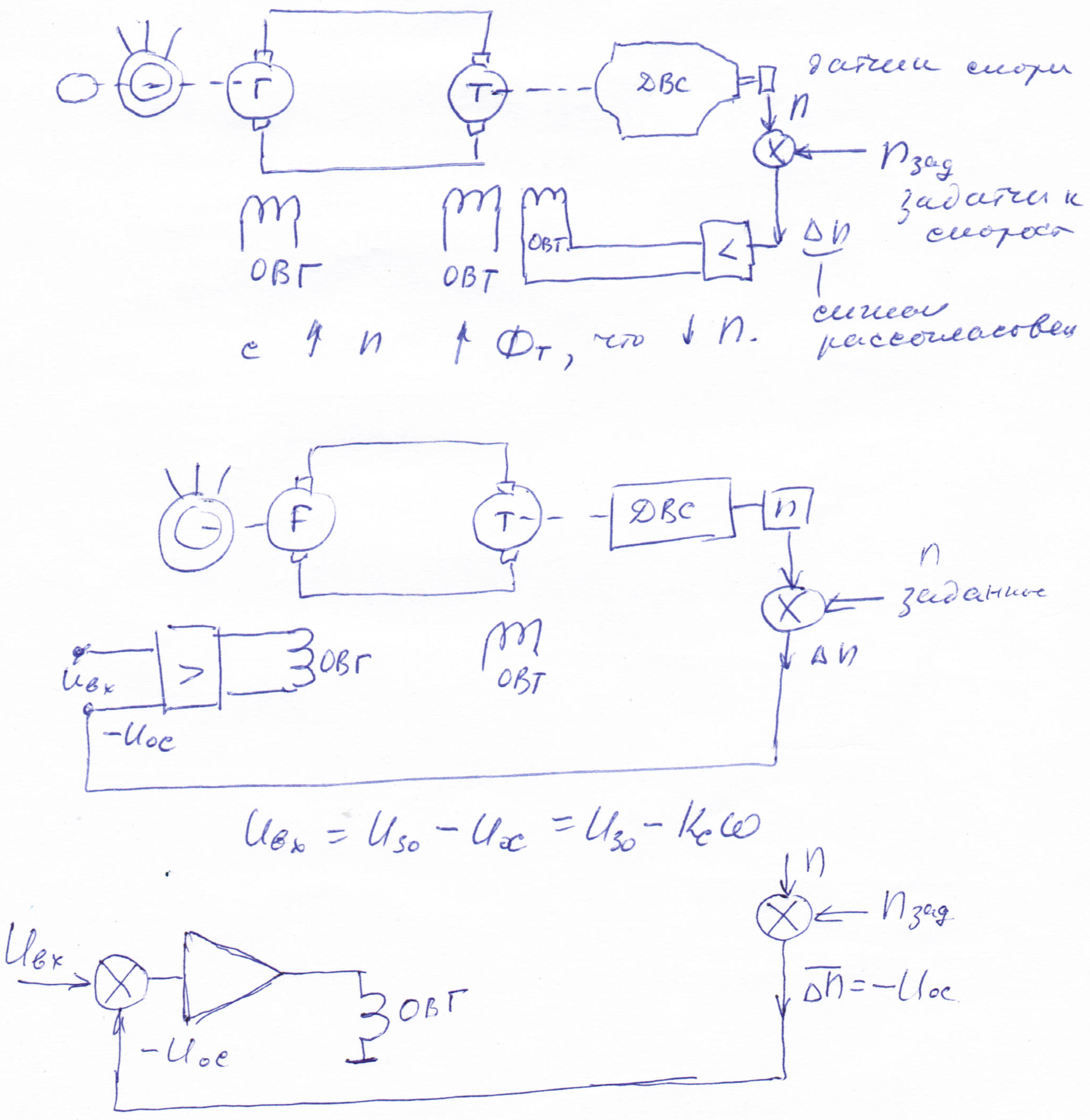
Применение САР с ООС по частоте вращения.
относительно сопротивления якоря.
Применение САР с ООС по частоте вращения.
Как происходит рекуперация энергии (при какой частоте вращения вала генератора)? КПД рекуперации?
На стадии, когда частота вращения вала АД совпадает с его синхронной частотой вращения переменного магнитного поля 3х фазного АД, момент на его валу становится равным 0. Ввиду жёсткой характеристики Ад для увеличения его частоты вращения требуется резко увеличить М, что обусловливает малое изменение n АД при резком возрастании энергии, отдаваемой в сеть переменного тока. Для этого надо увеличить Мг (момент генератора), который зависит от силы тока якоря и возбуждения статора. Но ток якоря возрастает автоматически при повышении мощности испытуемого ДВС. КПД МПТ < КПД АД (η = 85…90%). Для 2х МПТ η ≤ 0,75. Т.е. 75% мощности испытуемого ДВС отдаётся в сеть.
Зоны регулирования МПТ в системе Г-Д:
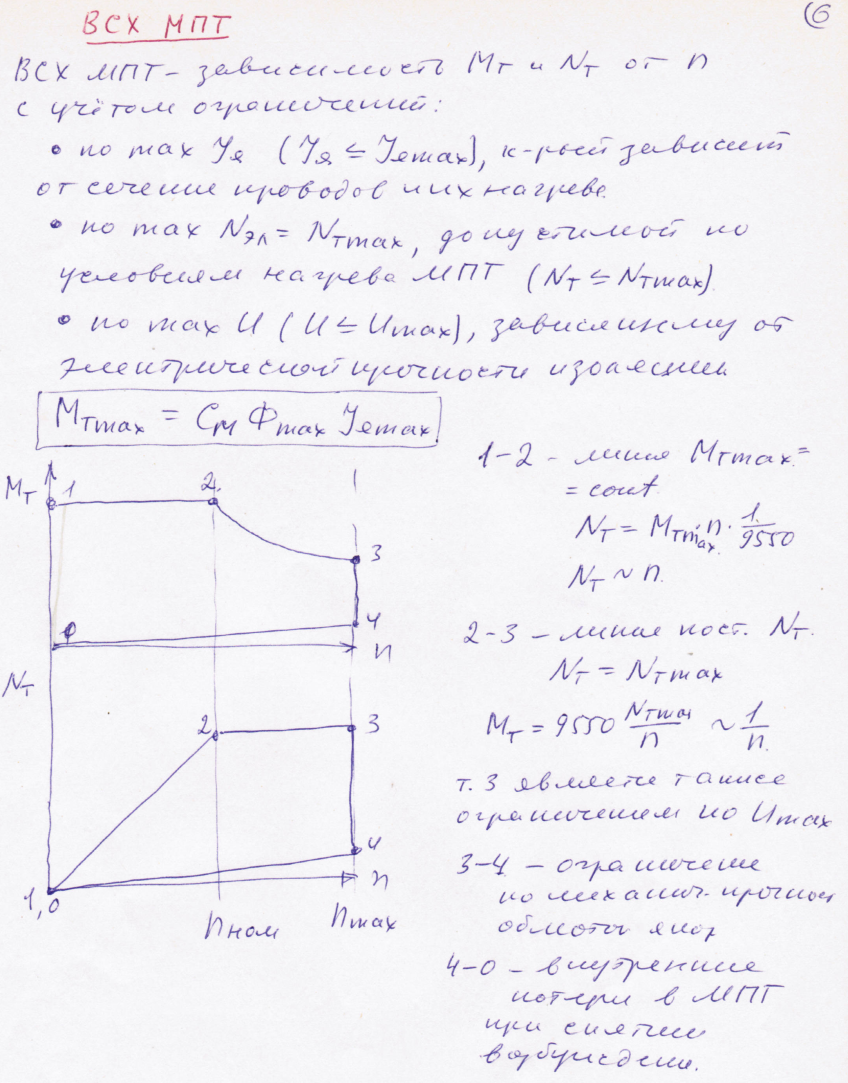
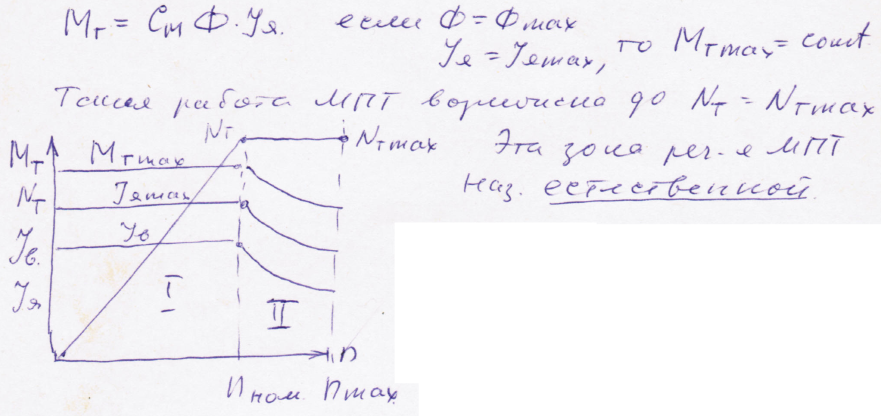
МПТ может регулироваться двумя путями: 1. Изменением внешней нагрузки при максимальном возбуждении Ф = Фmax, что соответствует Мт max. Такая работа МПТ возможна до Nт = Nт max (естественная зона). 2. Регулирование возможно только при сохранении Nт max = const, что возможно с уменьшением Мт за счёт уменьшения Ф (искусственная зона)
скольжение МПТ, ток генератора, напряжение в цепи якоря и тока возбуждения тормоза от частоты вращения в 1-й и во 2-й зонах регулирования?
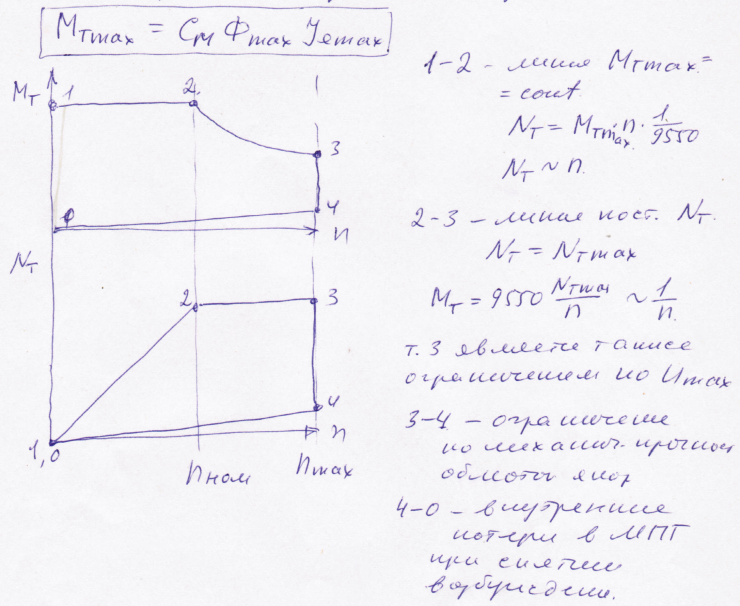
ВСХ МПТ – зависимость Мт и Nт от n с учётом ограничений. 1. По max Jя (Jя ≤ Jя max), который зависит от сечения проводов и их нагрева. 2. По max Nэл ≤ Nт max, допускаемой по условиям нагрева МПТ (Nт ≤ Nт max). 3. По max U (U ≤ Umax), зависящему от электрической прочности изоляции.
Реакция якоря. Её причины и последствия. Сдвиг физической нейтрали. Физическая сущность искажения магнитного поля, создаваемого обмоткой возбуждения, при наличии реакции якоря.
Воздействие поля якоря на поле возбуждения называется реакцией якоря. Реакция якоря искажает магнитное поле МПТ и делает его несимметричным относительно полюсов. Магнитное поле обмотки якоря изменяет свой знак при прохождении центра полюса. Однако оно ослаблено и в межполюсных промежутках из-за большого сопротивления магнитной цепи. Если МПТ работает в режиме «Г» (при вращении по часовой стрелке), то в результате реакции якоря результирующее магнитное поле будет ослаблено под «набегающим» полюсом и усилено над «сбегающим». Влияние реакции якоря усиливается при смещении щёток с ГН. Как следует из рисунка помимо поперечной составляющей МДС появляется и продольная составляющая, которая ослабляет суммарный поток МПТ в режиме «Г».
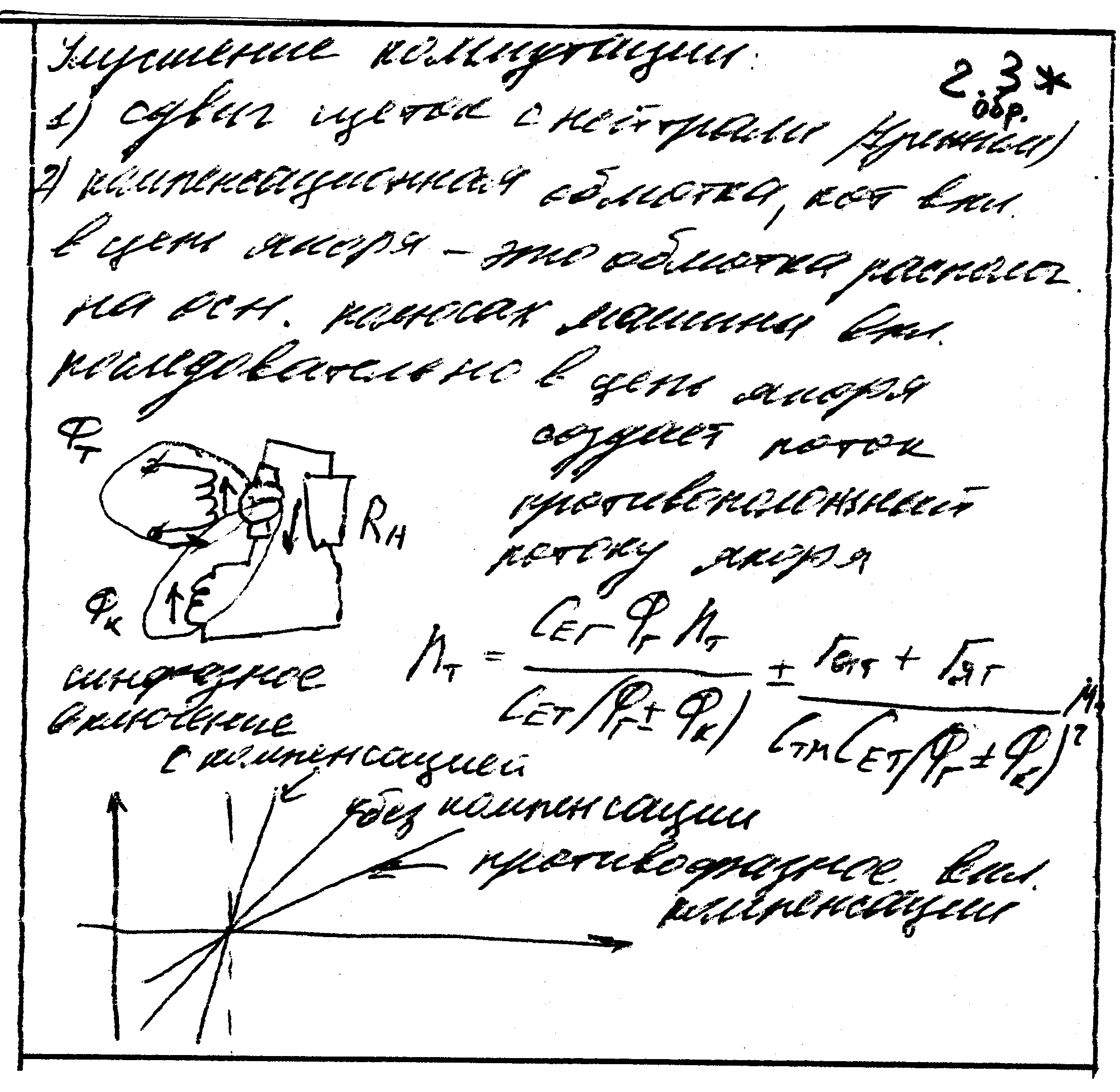
Улучшение коммутации с помощью дополнительной компенсационной обмотки (схема её включения).
Служит для компенсации поперечной реакции якоря. Назначение – сократить кривую индукции в воздушном зазоре такой же, как на режимах ХХ. Компенсационную обмотку располагают на основных полюсах МПТ и включают последовательно с обмоткой якоря. При последовательном соединении обмоток якоря и компенсационной обмотки через них проходит один и тот же ток, чем обеспечивается автоматизм компенсационной реакции якоря при любых нагрузках МПТ.
Уравнения механической характеристики МПТ в составе системы Г-Д с учётом её компенсационной обмотки при различных способах её включения.
Включение компенсационной обмотки существенно изменяет крутизну МХ МПТ. Уравнение МХ МПТ с учётом компенсационной обмотки:
![]()
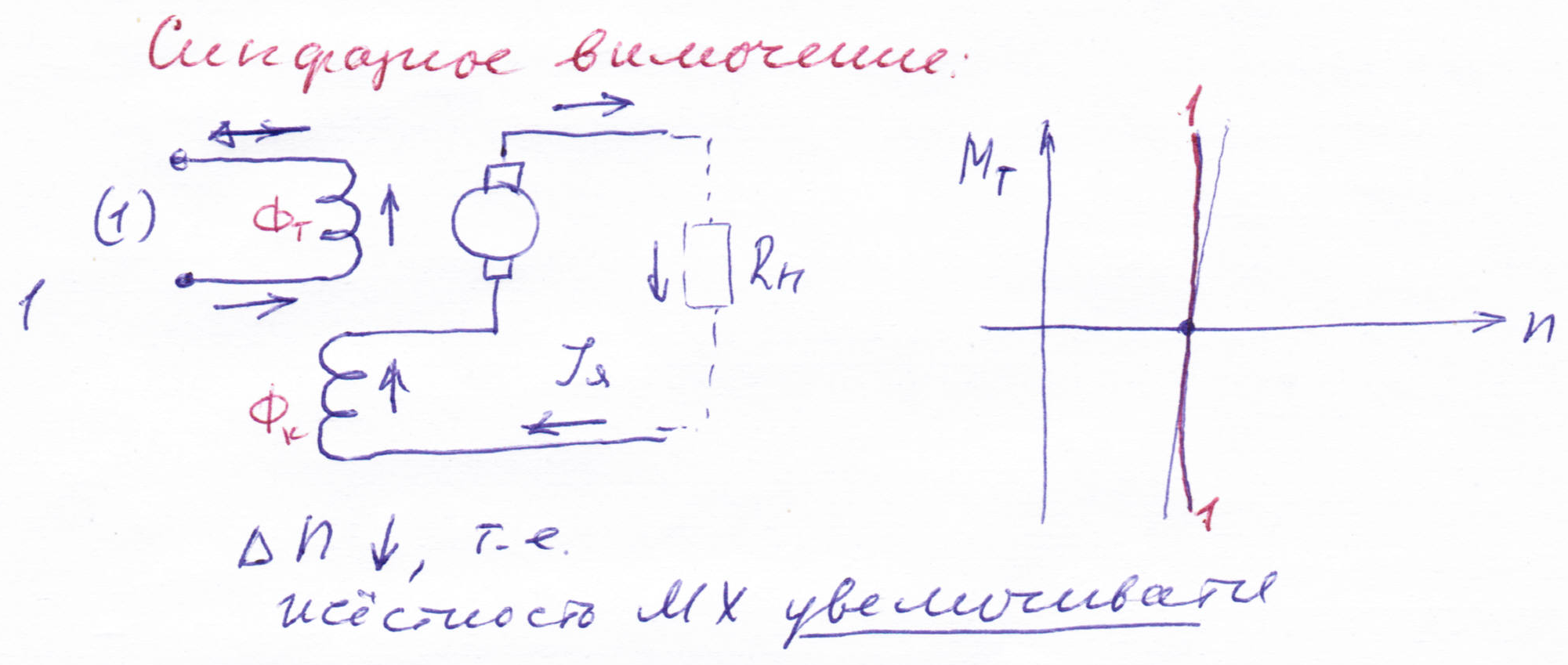
Способы повышения жёсткости механических характеристик МПТ (2).
1.
Применение более мощных МПТ, которые
при поглощении меньшей мощности имеют
меньшее скольжение. Причины
![]() относительно сопротивления якоря.
Однако также МПТ имеют меньшую
быстроходность из-за увеличенной массы.
2. Применение САР с ООС по частоте
вращения.
относительно сопротивления якоря.
Однако также МПТ имеют меньшую
быстроходность из-за увеличенной массы.
2. Применение САР с ООС по частоте
вращения.
Преимущества и недостатки МПТ в качестве нагружающих устройств ДВС.
Преимущества: 1. Возможность рекуперации энергии. 2. Возможность проворачивания ДВС. 3. Широкий диапазон регулирования по нагрузке. 4. Устойчивость и стабильность процесса управления МПТ. 5. Плавное и бесступенчатое регулирование. 6. Высокая «жёсткость» ЭМХ в режиме Г-Д, что позволяет снижать НХ ДВС практически не трогая органы управления тормозом. 7. Относительно небольшая мощность управления. 8.
Недостатки: 1. Высокая стоимость производства и эксплуатации (особенно системы Г-Д). 2. Ограниченный скоростной режим (n ≤ 8000 мин-1). 3. Резкое снижение максимальной мощности с увеличением скоростного режима. 4. Электромагнитная инерционность МПТ и практическая невозможность форсирования переходных процессов превышением номинального напряжения. Это ограничивает возможности использования МПТ в составе быстроходных САУ.
Область применения.
1. Исследовательские испытания ДВС. 2. доводочные работы ДВС. 3. возможность кратковременной нагрузки МПТ.
Тиристорное управление МПТ, как нагружающего устройства ДВС. Принцип работы тиристора. Преимущества и недостатки тиристора как управляющего прибора. Принцип управления тиристором? Поясните свой ответ соответствующим графиком. Приведите простейшую схему управления МПТ с помощью тиристора. С помощью какого устройства непрерывный управляющий сигнал преобразуется в фазовый сдвиг? Приведите блок-схему этого устройства. Преимущества и недостатки тиристорного управления МПТ.
НЕ БУДЕТ