

6.4. Измерение сигнала пьезоэлектрических индикаторов.
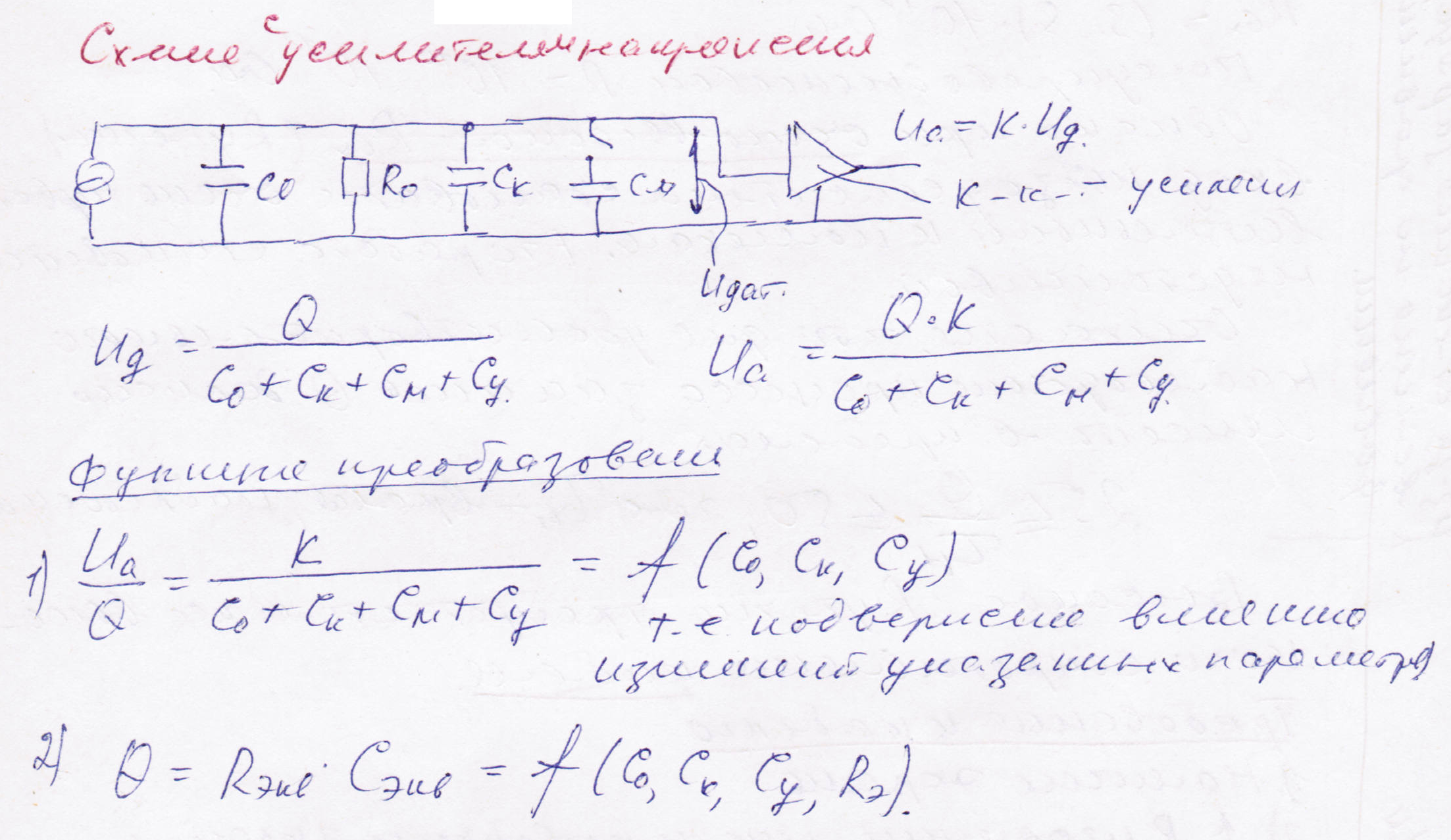
Схема с усилителем напряжения: принципиальная схема включения пьезодатчика; функция преобразования и постоянная времени; влияющие факторы, основные недостатки. Каким способом в этом случае можно изменять масштаб регистрации? Каким требованиям должен отвечать входной каскад усилителя напряжения? Какими электронными элементами это обеспечивается?
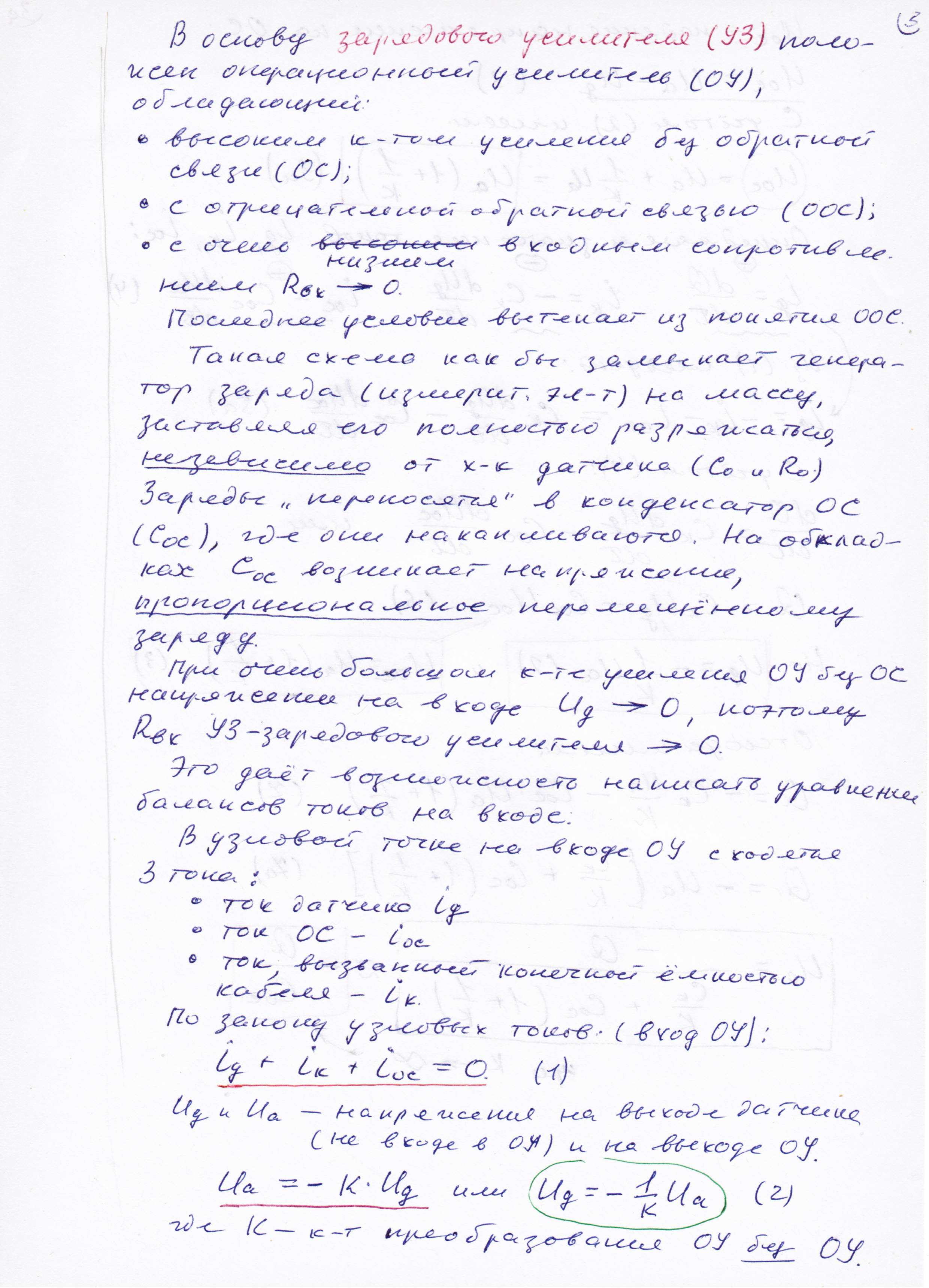
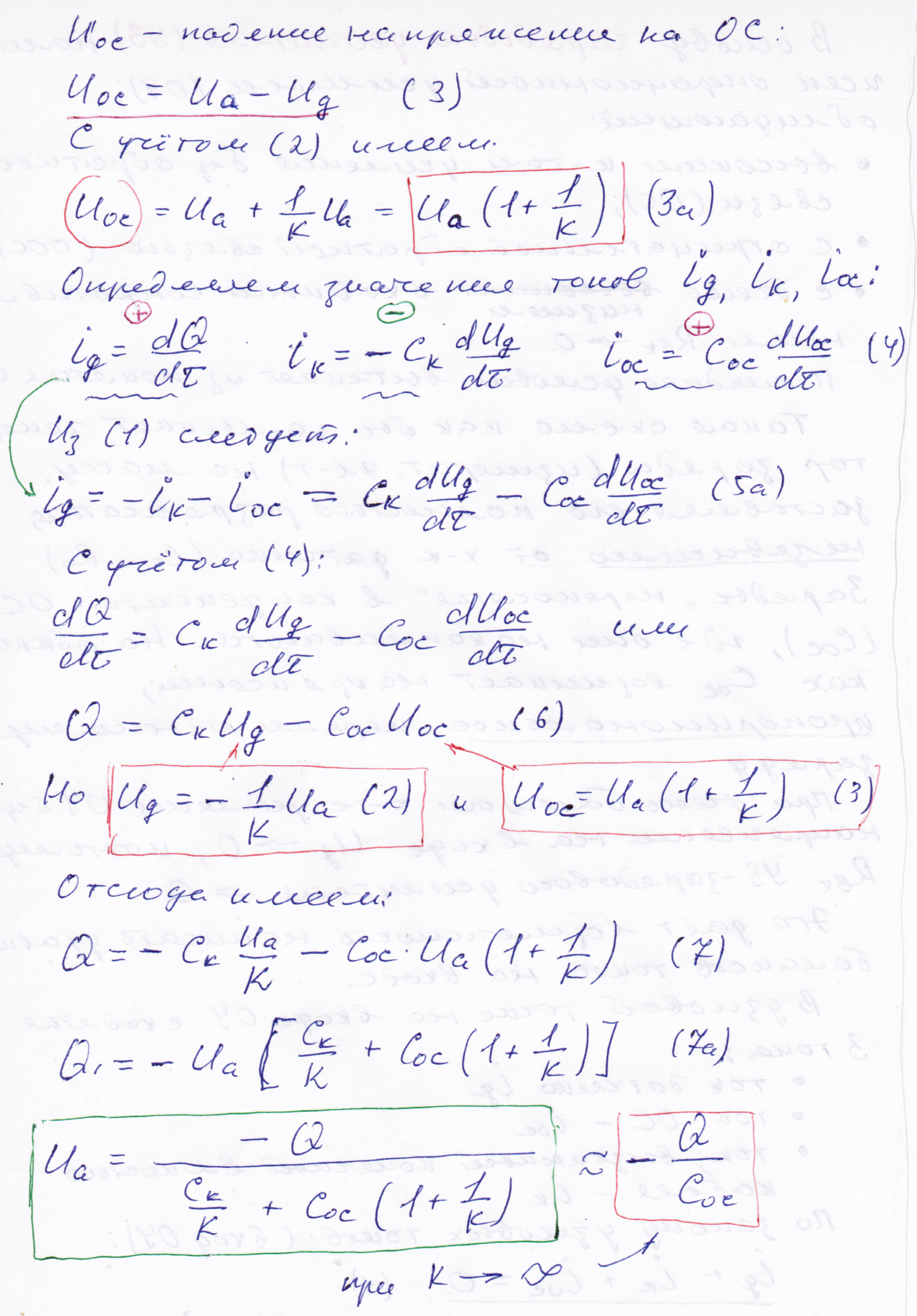
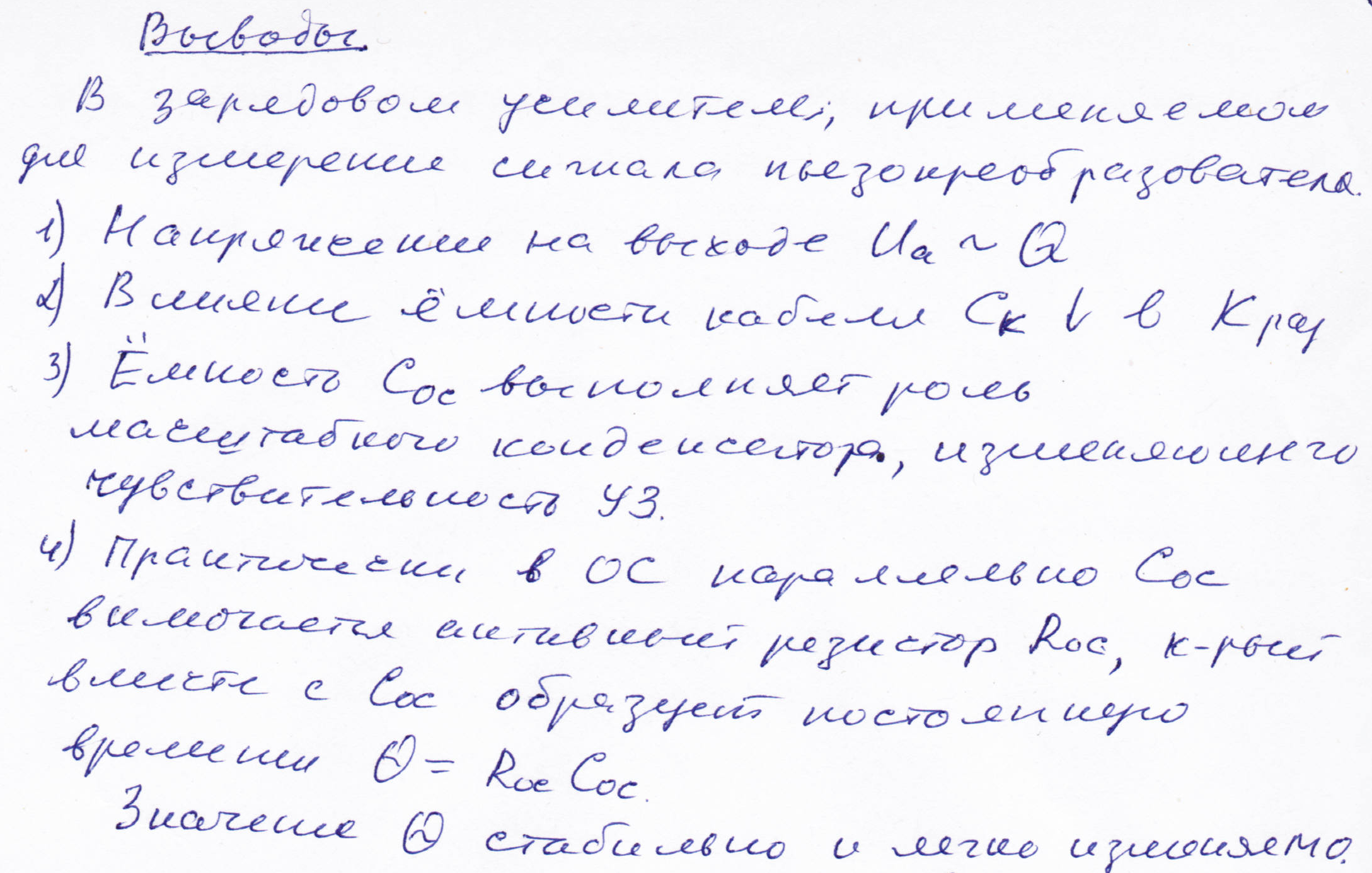
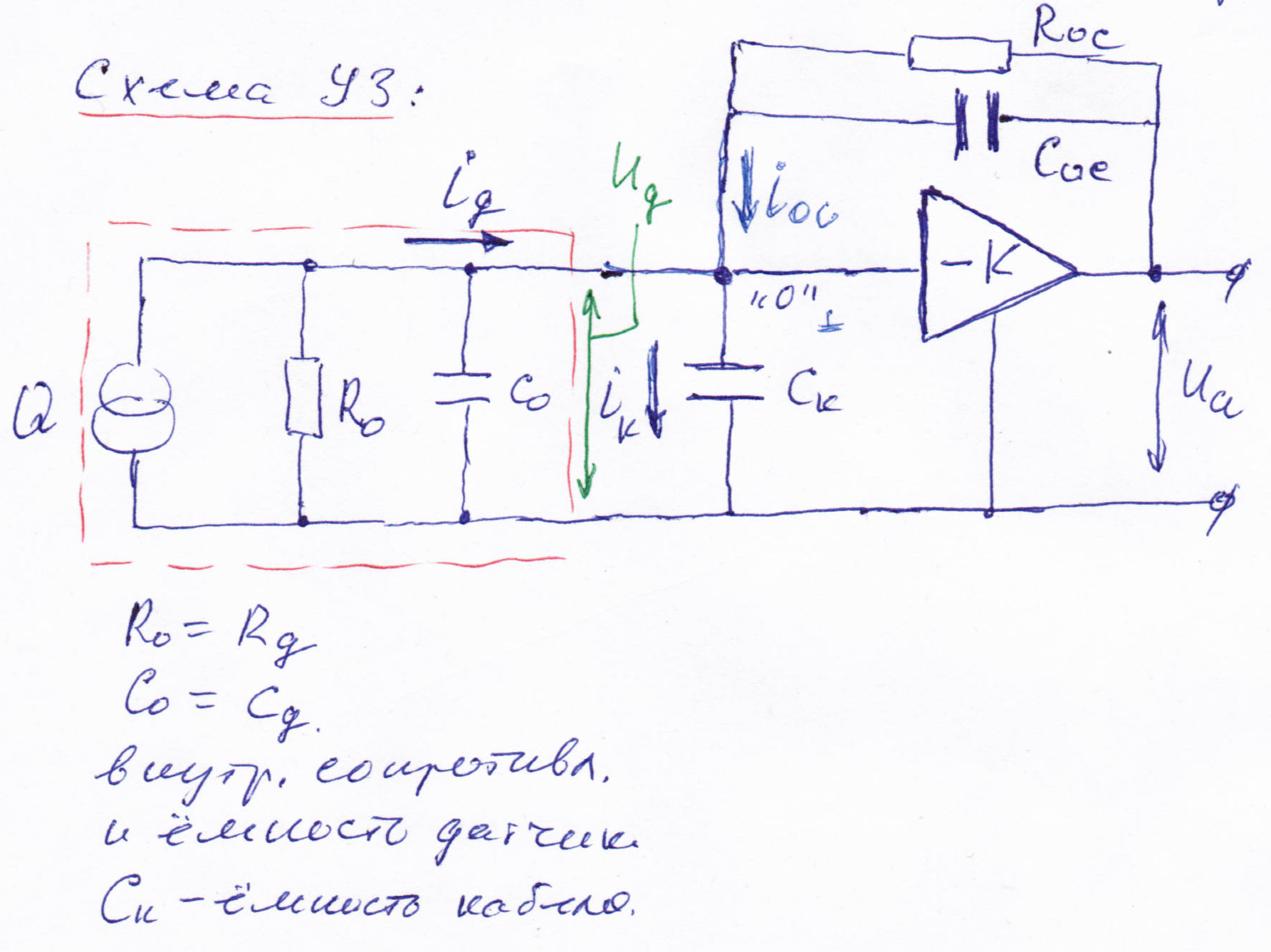
Схема с усилителем заряда: принципиальная схема включения пьезодатчика. Каким требованиям в этом случае должен удовлетворять усилитель? Каким должно быть его входное сопротивление? Основные уравнения, описывающие поведение этой схемы(3)? Функция преобразования и постоянная времени. Каким способом в этом случае можно изменять масштаб регистрации? Основные преимущества данной схемы.
6.5. Регистрация сигналов давления. Основные задачи регистрации.
В автоматическом режиме. 1. Собственно регистрация мгновенных значений давления в цилиндре в зависимости от угла ПКВ. 2. Алгоритм обработки индикаторных диаграмм с целью получения рi или характеристик тепловыделения. 3. Коррекция возможных динамических погрешностей. 4. Возможность визуального отображения в режиме текущего времени. 5. Организации сбора и хранения информации.
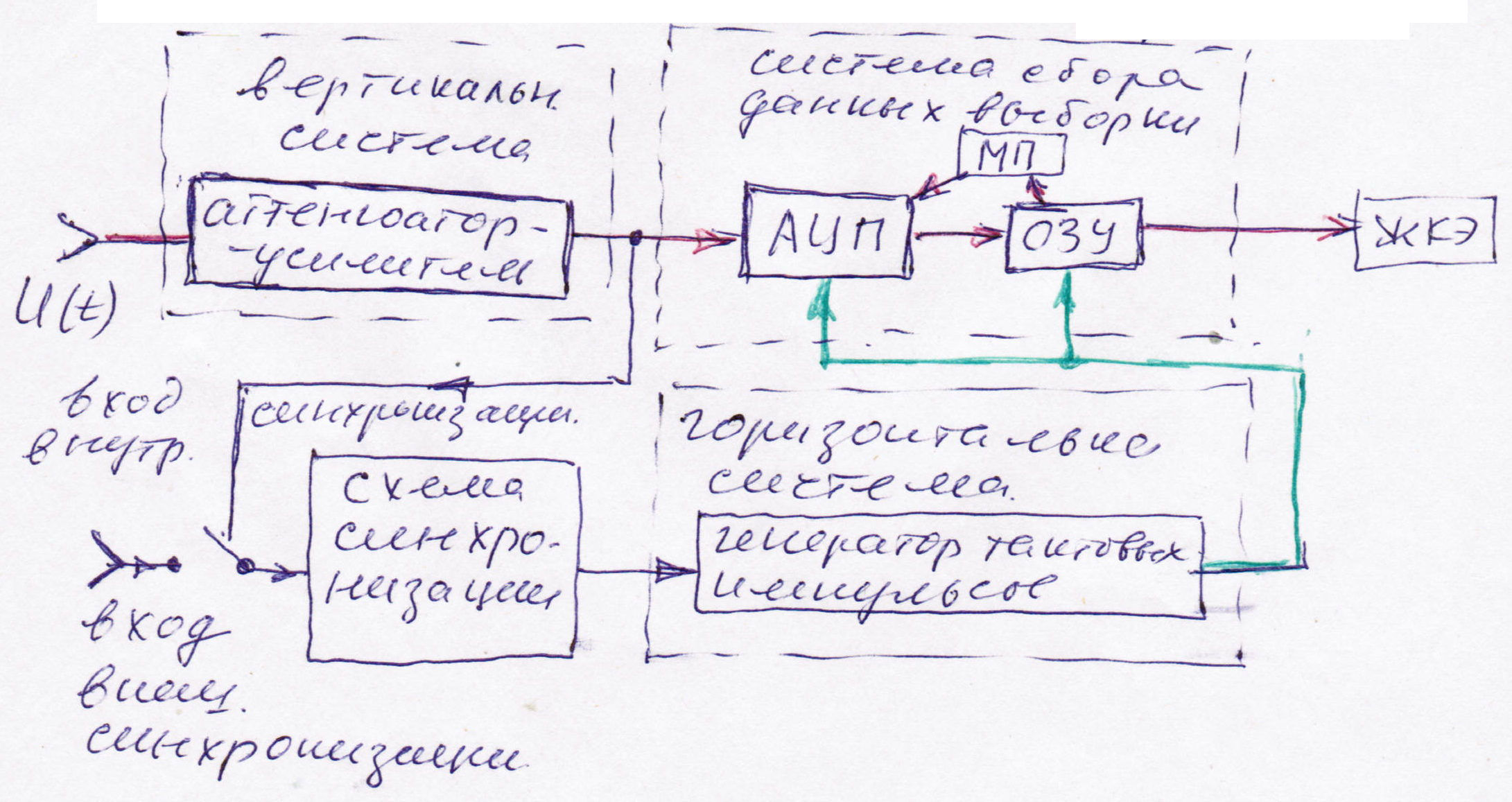
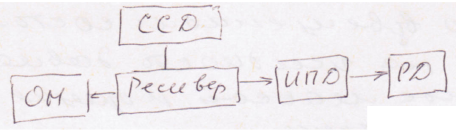
Понятие дискретной регистрации: её сущность и средства дискретизации непрерывного сигнала. Цифровой осциллограф (ЦО): блок-схема, основные элементы.
В основе ЦО лежит преобразование исследуемого аналогового сигнала в последовательность цифровых значений
![]()
Эту задачу выполняет АЦП. Числовой код мгновенных значений сигнала передаётся в ЗУ, где накапливается в виде последовательности чисел, которые могут длительно храниться. Цифровая форма делает удобной программную и графическую обработку сигнала (числовых данных) и их отображения на плоском экране.
Аттенюатор и его назначение.
Аттенюатор и усилитель предназначены для приведения уровня исследуемого сигнала (напряжения) к рабочему диапазону напряжений АЦП. Т.е. происходит согласование амплитудных характеристик сигнала с АЦП.
АЦП: назначение, разрядность, погрешность квантования.
АЦП – в дискретных точках выборки (моменты времени): преобразует аналоговый сигнал в цифровую форму; кодирует его; запоминает в ОЗУ. Т.о. в «вертикальном канале создаётся код мгновенных значений сигнала. АЦП формирует напряжение в 8-ми или 10-разрядном двоичном коде. Соответственно число уровней квантования составит или 256 или 1024. Т.о. относительные погрешности составят 0,4% или 0,1%.
Генератор тактов (таймер): назначение.
Вырабатывает импульсы выборки с периодом следования, равным шагу дискретизации для запуска АЦП (цифровой аналог генератора развёртки универсальных осциллографов). Таймер обеспечивает равномерное считывание мгновенных значений аналоговой величины сигнала во времени с заданным шагом дискретизации. Вместе с тем моменты временной выборки, частота и скорость выборки согласуются с длительностью и частотой следования исследуемого аналогового сигнала. Абсолютное значение временного интервала определяется счётом тактовых импульсов двоичным счётчиком. Номер импульса задаёт адрес ячейки ОЗУ, в которую записывается код АЦП.
Запоминающее устройство: его состав, запись данных в оперативное запоминающее устройство.
ЗУ состоит из: быстродействующего ОЗУ и ЗУ с меньшим быстродействием, но значительно большей памятью. Данные из АЦП для временного хранения записываются в быстродействующее ОЗУ по адресам ячеек.
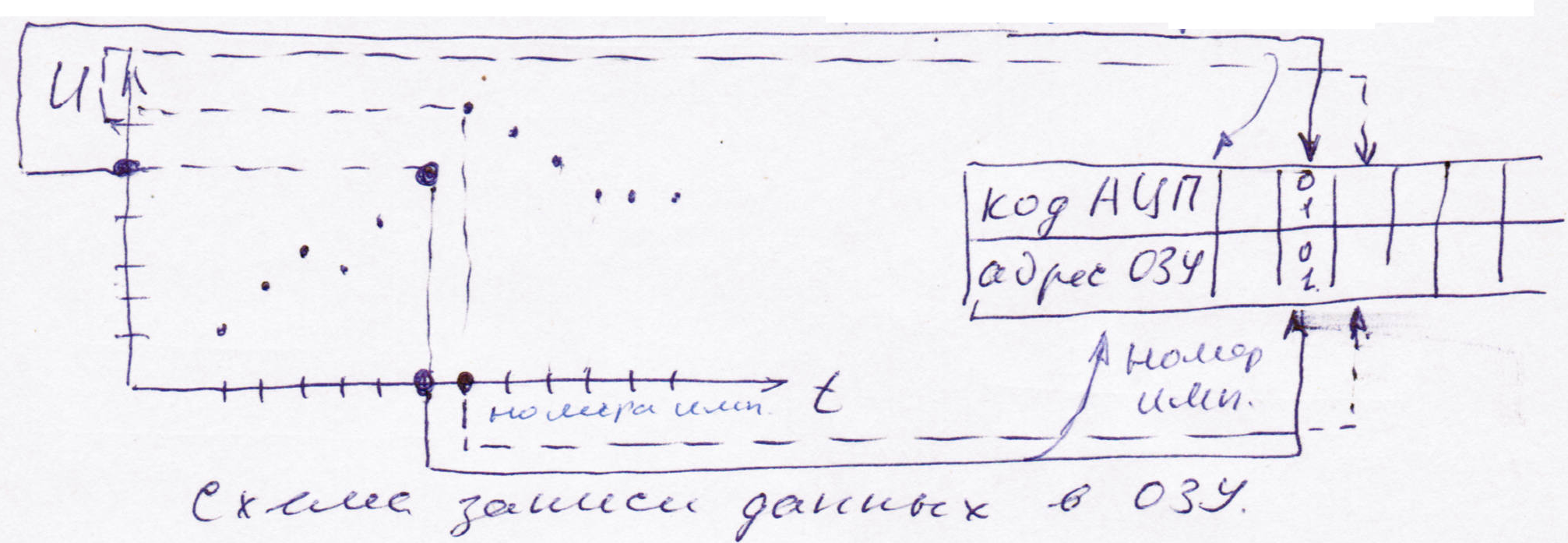
Перебор адресов ячеек памяти ОЗУ происходит циклически, поэтому данные в них непрерывно обновляются. С приходом импульса синхронизации происходит последняя запись в ОЗУ и блокировка записи от нового запуска осциллографа до тех пор, пока данные не будут переписаны в менее быстродействующее ЗУ. Это ЗУ служит для долговременного хранения данных и их последующей обработке и отображению на экране ЦО.
Система синхронизации.
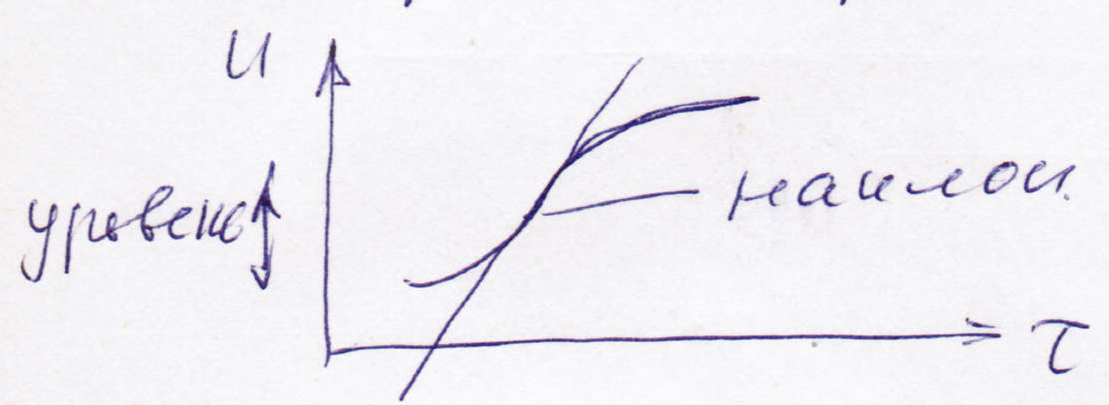
Синхронизирует работу всех блоков ЦО. Она аналогична системе синхронизации аналоговых осциллографов. Назначение системы – получение устойчивого изображения на экране. Она содержит устройства для управления генератором развёртки. Синхронизация может быть внутренней и внешней. При внутренней часть сигнала вертикального канал вертикального отклонения поступает на вход системы синхронизации. При внешней запуск происходит внешним сигналом. Система имеет традиционное управление напряжением синхронизации, при достижении которого происходит регистрация сигнала (уровень) и с учётом увеличения или уменьшения сигнала (наклон).
Отображение информации.
Дисплей предназначен для отображения информации на экране о режимах работы ЦО и результатов измерений.
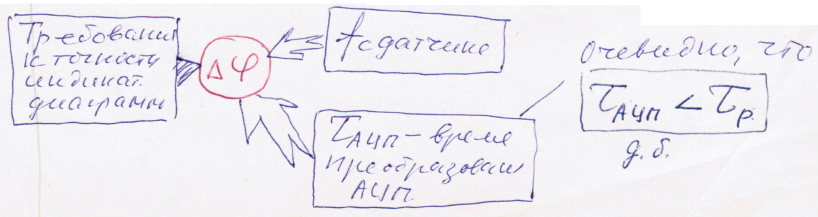
Выбор угла дискретизации.
Выбор угла дискретизации (Δφ) определяется требованиями к точности обработки индикаторной диаграммы.
Чем определяется выбор частоты дискретизации или угла дискретизации?
Частота дискретизации fg, численно равная частоте опроса АЦП, определяется: 1. частота вращения КВ, n. Заданным углом дискретизации, Δφ.

Время регистрации и его связь с частотой дискретизации.
Время регистрации
τp
– величина, обратная частоте дискретизации,
т.е.
![]() .
Очевидно, что при n
= 1000 мин-1
τр
= 166,2 мкс.
.
Очевидно, что при n
= 1000 мин-1
τр
= 166,2 мкс.
Как определить целесообразный угол дискретизации для четырёхтактного цикла, если известны частота вращения (например, 6000 мин1) и время преобразования АЦП?
Подобная частота регистрации достаточна для приемлемой точности определения рi, но недостаточна для определения текущих значений р и Т (необходимых, в частности, расчёта NOx). Поэтому необходима более высокая степень дискретизации, в частности, через 0,1оПКВ. В целом выбор Δφ определяется с учётом:
Как определить частоту опроса АЦП для четырёхтактного цикла, если известны частота вращения и угол дискретизации?
Пример: при Δφ =
0,1о
fg
= 360 кГц, τр
= 2,7 мкс. Тогда τацп
болжно быть 1…2 мкс. Если τацп
= 2,5 мкс (что встречается чаще в РФ), то
следует увеличить Δφ до 0,3о,
т.к. дискретизация через 0,1о
не имеет смысла. В отечественной практике
Δφ = 0,35о.
Тогда
![]() .
Что соответствует τр
= 10 мкс. Δφ = 0,35о
требует 1000 меток за 1 оборот КВ. Т.о.
задающее устройство ДПУ (задатчик углов
ПКВ) должен обеспечивать соответствующее
быстродействие.
.
Что соответствует τр
= 10 мкс. Δφ = 0,35о
требует 1000 меток за 1 оборот КВ. Т.о.
задающее устройство ДПУ (задатчик углов
ПКВ) должен обеспечивать соответствующее
быстродействие.
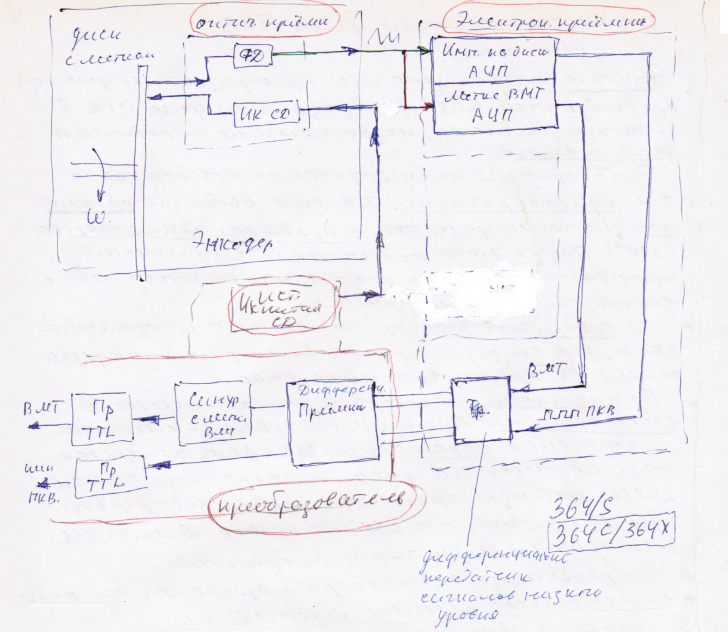
Блок-схема дискретной регистрации сигналов давления.
Требуемый объём регистрации индикаторных диаграмм (количество индикаторных диаграмм, необходимое для адекватной оценки результата, например, для определения среднего индикаторного давления). Число индикаторных диаграмм, которое может быть зарегистрировано при заданном угле дискретизации (например, 0,35) в данную оперативную память объёмом, например, 1 кб.
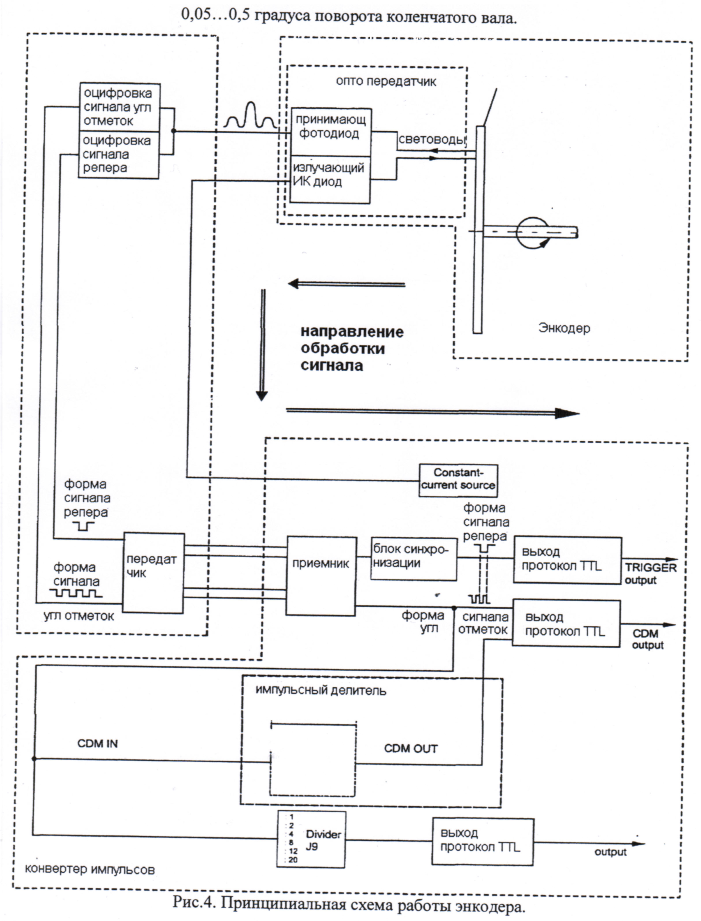
Техническая реализация дискретизации угла поворота коленчатого вала (на примере схемы AVL. Элементы схемы, их назначение, способ регистрации, диаграмма работы, принцип уменьшения шага дискретизации. Сколько кодовых меток (отверстий или щелей) должно быть нанесено на диске, чтобы обеспечить шаг дискретизации 0,1 ПКВ?
6.6. Градуировка датчиков пьезоэлектрических индикаторов.
Цель получение зависимости выходного сигнала от давления, приложенного к датчику.
В каких случаях возможна статическая градуировка пьезодатчиков? Как она проводится? Какие технические средства используются? В чём её недостатки? Насколько уменьшится уровень сигнала при статической градуировке за время цикла при данной частоте вращения и данной постоянной времени утечки? Как определить минимальную постоянную времени утечки, при которой за заданное время градуировки стекание заряда не превысит =0,2%?
Для
получения фиксированных значений
давления используются грузопоршневые
манометры (ГПМ) и масленые прессы (МП).
Основные требования к ГПМ: 1. Возможность
создания давлений до 50 МПа. 2. Высокая
точность измерения (γ = ± 0,02…0,05). 3.
Точность воспроизведения заданных
усилий. Возможность реализации статической
градуировки определяется постоянной
времени θ СИ давления. Её значения должны
быть в пределах 25 ≤ θ/tн
≤ 50, где tн
– время наблюдения. Но за время градуировки
возможно стекание заряда
![]() .
1. Определить пределы θ для n
= 1200 и 6000 мин-1.
2. Если θ = 0,5с, то на сколько % произойдёт
утечка при n
= 1200 мин-1.
3. Если время градуировки τгр
= 300с, то при каком значении θ погрешность
δ ≤ 0,2%. При проведении измерений
необходимо тщательно удалять воздух
из рабочих полостей.
.
1. Определить пределы θ для n
= 1200 и 6000 мин-1.
2. Если θ = 0,5с, то на сколько % произойдёт
утечка при n
= 1200 мин-1.
3. Если время градуировки τгр
= 300с, то при каком значении θ погрешность
δ ≤ 0,2%. При проведении измерений
необходимо тщательно удалять воздух
из рабочих полостей.
Статическая градуировка вне двигателя имеет существенный недостаток, связанный с тем, что ИПД находится в условиях, резко отличающихся от рабочих (например по температуре). Эта погрешность в общем случае не поддаётся точной оценке и может быть довольно значительной.
Каким образом осуществляется градуировка датчика непосредственно на двигателе? В чём её преимущества? Какой датчик используется для этой цели?
В основу способа градуировки на двигателе положен метод сравнения сигнала ИПД с сигналом образцового датчика. В качестве последнего используется клапанный датчик пневмоэлектрического индикатора давления с индукционным вторичным преобразователем. По начальным фазам движения такого датчика, точка равенства давлений (в полости датчика образованного и в полости КС) может быть зарегистрирована с высокой точностью.
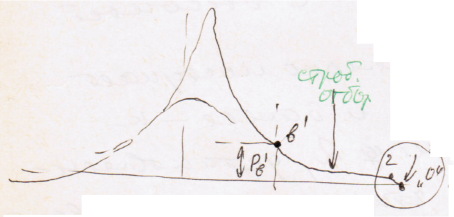
Способы нанесения нулевой линии индикаторной диаграммы (2).
Задавая различную величину контролируемого давления, можно получить совокупность таких ординат и определить масштаб давления. Однако, необходимо знать его абсолютную величину, для чего надо определить начало отсчёта (нулевую линию) или линию атмосферного давления. Возможны два варианта: 1. Ориентируются на линию выпуска или впуска. В полость пневмоэлектрического датчика подавалось рконтр, примерно равное давлению перед открытием выпускного клапана, т.е. рконтр = рв’ этот момент принимается за контролирующую точку. От точки ИД, соответствующий данному моменту, в масштабе давлений, откладывается отрезок, равный рконтр в полости пневмоэлектрического датчика. Линия, проведённая через нижнюю точку считалась искомой атмосферной линией, которая принималась за начало отсчёта при обработке ИД.
2. С помощью быстродействующего стробоскопического клапана проводился отбор газа на выпуске, с последующим измерением давления отобранного газа образованным манометром.
В каких случаях необходима динамическая градуировка пьезодатчиков?
1. Определение характеристик датчика при наличии низкой постоянной времени θ, т.е. при наличие утечек; 2. Определение погрешности, вызванной утечкой заряда.
Как она проводится (методика её проведения)? Что ещё определяется по этой градуировке?
Для этой цели используется пневмогидравлическое устройство, воспроизводящее П-образные импульсы давления, воздействующие на ИПД. Оно включает в себя.
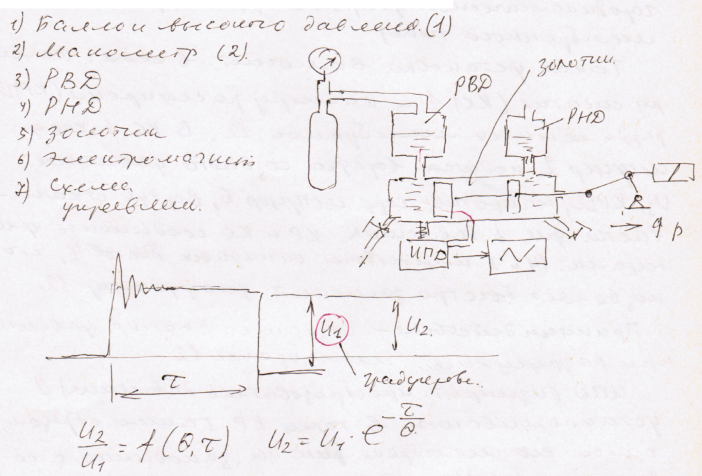
Как определяется собственная частота индикаторов? Какая ещё характеристика датчика определяется в этом случае?
Цель – определение динамических свойств датчиков давления с целью дальнейшей оценки динамической погрешности СИ. Метод – использования П-образных импульсов давления, создаваемых специальной установкой для создания импульсных давлений (импульсные установки типа газодинамической ударной трубы).