

2.4. Расчет вала на сложное сопротивление
Для расчета был выбран III вал. Линейные размеры вала и расположение зубчатых колес определим из эскизного проектирования. Схема нагружения вала изображена на рис. 9. На вал III действуют окружные Рτ и радиальные Рr усилия от зубчатого зацепления.
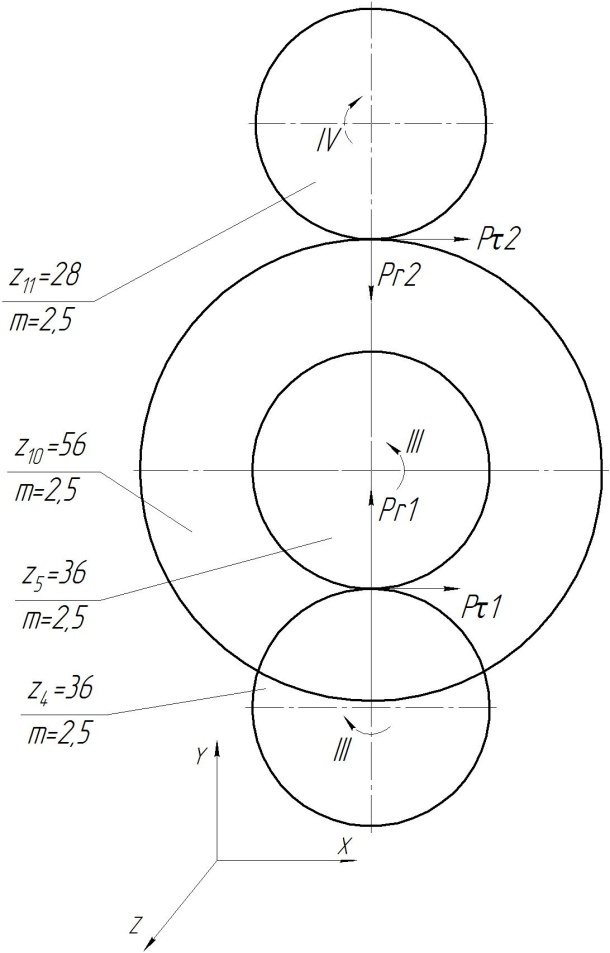
Рис. 9 Расчетная схема действия сил в зубчатых зацеплениях.
Исходя из компоновки, имеем 6 вариантов нагружения вала:
Z4:Z5 + Z10:Z11
Z4:Z5 + Z12:Z13
Z6:Z7 + Z10:Z11
Z6:Z7 + Z12:Z13
Z8:Z9 + Z10:Z11
Z8:Z9 + Z12:Z13
Для расчета выберем первый вариант Z4:Z5 + Z10:Z11.
Расчет
крутящих моментов
 возьмем
из ориентировочного расчета вала.
возьмем
из ориентировочного расчета вала.
Тангенциальная сила действующая в зацеплении:
 ;
;
 ;
;
Радиальная сила действующая в зацеплении:
 ;
;
 ;
;
Тангенциальная сила действующая в зацеплении:
 ;
;
Радиальная сила действующая в зацеплении:

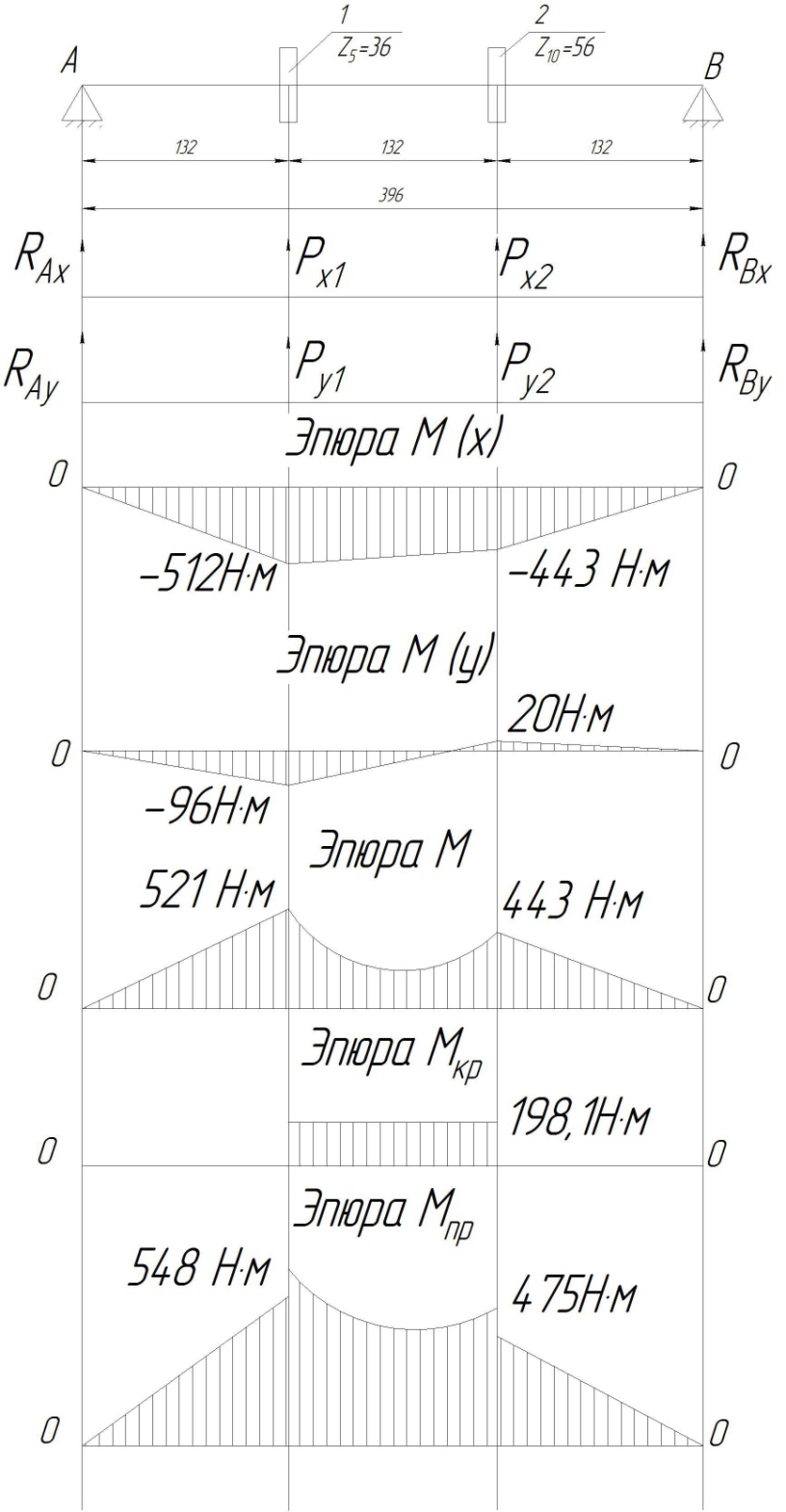
Рис. 10. Расчетная схема и результаты расчетов для первого варианта нагружения III вала.
Проецируем найденные силы на оси ox и oy:
в сечении I:


в сечении II:


Определение реакций опор в плоскости zox и zoy:
∑mА(Fх) = 0,
Px1·132 + Px2·264+ RBx ·396=0,
RBx= - (Px1·132 + Px2·264)/396= -3354,0 H.
∑mВ(Fх) = 0,
- RАx·396 -Px1 ·264 - Px2·132 = 0,
RАx = - (Px1 ·264 + Px2·132)/396= - 3878,2H.
Проверка:
RАx + Px1+Px2+RBx = 0,
-3878,2+4402,2+2830,0-3354,0=0
Реакции в плоскости zox определены правильно.
∑mА(Fу) = 0,
Py1·132 + Py2·264+ RBy ·396 = 0,
RBy= - (Py1·132 + Py2·264)/396 = 152,5 H.
∑mB(Fу) = 0,
- RАy·396 –Py1 ·264 – Py2·132 = 0,
RАy = - (Py1 ·264 + Py2·132)/396= -724,8 Н.
Проверка:
RАy + Py1 +Py2 + RBy = 0,
-724,8 + 1602,3 -1030,0+152,5= 0,
Реакции в плоскости zoу определены правильно.
Расчет изгибающего момента в плоскости zox:
Ми(х1) = RAx · a = - 511,9 H·м,
Ми(х2) = RBx · c = - 442,7 H·м,
Расчет изгибающего момента в плоскости zoу:
Ми(у1)= RAy · a = - 95,7 H·м,
Ми(у2) = RBy · c = 20,1 H·м.
Расчет суммарного изгибающего момента:



Расчет крутящего момента для III вала:
 ,
Н·м;
,
Н·м;
 Н·м;
Н·м;
Расчет приведенного момента:



По полученным значениям построим эпюры моментов: МХ, МУ, МΣ, МКР, МПР.
Определение диаметра вала в опасном сечении:
 ;
;
 мм;
мм;
Проверку первого и расчет остальных вариантов зацеплений ведем в Excel (таблица 5).
Таблица 5
Данные: |
||||||||||||
Варианты зацепленний |
Z1 |
Z2 |
Mкр |
m |
L |
a |
b |
c |
α |
β |
Mкр |
σи |
1 |
36 |
56 |
198,1 |
2,5 |
396 |
132 |
132 |
132 |
0 |
0 |
198,1 |
130 |
2 |
36 |
24 |
198,1 |
2,5 |
396 |
132 |
229 |
35 |
0 |
0 |
198,1 |
130 |
3 |
40 |
56 |
198,1 |
2,5 |
396 |
35 |
229 |
132 |
0 |
0 |
198,1 |
130 |
4 |
40 |
24 |
198,1 |
2,5 |
396 |
35 |
326 |
35 |
0 |
0 |
198,1 |
130 |
5 |
44 |
56 |
198,1 |
2,5 |
396 |
229 |
35 |
132 |
0 |
0 |
198,1 |
130 |
6 |
44 |
24 |
198,1 |
2,5 |
396 |
229 |
132 |
35 |
0 |
0 |
198,1 |
130 |
|
Расчет: |
||||||||||
Варианты зацепленний |
Pτ1 |
Pτ2 |
Pr1 |
Pr2 |
Px1 |
Px2 |
Py1 |
Py2 |
RAx |
RBx |
ΣRx |
1 |
4402 |
2830 |
1602 |
1030 |
4402 |
2830 |
1602 |
-1030 |
-3878 |
-3354 |
0 |
2 |
4402 |
6603 |
1602 |
2403 |
4402 |
6603 |
1602 |
-2403 |
-3518 |
-7487 |
0 |
3 |
3962 |
2830 |
1442 |
1030 |
3962 |
2830 |
1442 |
-1030 |
-4555 |
-2237 |
0 |
4 |
3962 |
6603 |
1442 |
2403 |
3962 |
6603 |
1442 |
-2403 |
-4195 |
-6370 |
0 |
5 |
3602 |
2830 |
1311 |
1030 |
3602 |
2830 |
1311 |
-1030 |
-2462 |
-3970 |
0 |
6 |
3602 |
6603 |
1311 |
2403 |
3602 |
6603 |
1311 |
-2403 |
-2103 |
-8103 |
0 |
|
Расчет: |
|||||||||||
Варианты зацепленний |
RAy |
RBy |
ΣRy |
Mиx1 |
Mиx2 |
Mиy1 |
Mиy2 |
Mи1 |
Mи2 |
Мпр1 |
Мпр2 |
d |
1 |
-725 |
152,5 |
0 |
-512 |
-443 |
-95,7 |
20,14 |
520,8 |
443,2 |
548,3 |
475,2 |
34,8 |
2 |
-856 |
1657 |
0 |
-464 |
-262 |
-113 |
57,99 |
478 |
268,4 |
507,8 |
318,5 |
33,9 |
3 |
-971 |
559,2 |
0 |
-159 |
-295 |
-34 |
73,82 |
163 |
304,4 |
236,7 |
349,4 |
30,0 |
4 |
-1102 |
2064 |
0 |
-147 |
-223 |
-38,6 |
72,22 |
151,8 |
234,4 |
229,1 |
290,4 |
28,2 |
5 |
-210 |
-71,4 |
0 |
-564 |
-524 |
-48 |
-9,43 |
565,9 |
524,1 |
591,3 |
551,4 |
35,7 |
6 |
-340 |
1433 |
0 |
-481 |
-284 |
-78 |
50,15 |
487,8 |
288 |
517,1 |
335,2 |
34,1 |
Самые высокие нагрузки возникают на 5 варианте нагружения, минимальный диаметр третьего вала равен 36 мм. Диаметр вала III взят с запасом d=40мм. Следовательно, он способен выдержать возникающие нагрузки.