

1.2. Разработка структурной формулы проектируемого привода с обоснованием и выбором оптимального варианта
По заданным значениям nmax = 2000 об/мин, nmin =20 об/мин, показатель геометрического ряда φ = 1,26 находим Zn:
Диапазон регулирования
Rn = nmax/ nmin=2000/20=100
Zn =1+ lgRn/lgφ=1+ lg100/lg1,26=20,9
Число скоростей принимаем Z = 21, как и в коробке скоростей модернизируемого станка 16Б16П.
Общая формула привода имеет вид:
Z = p1(x1) · p2(x2) · p3(x3) ·…· pn(xn).
Кинематический вариант определяется характеристиками групп х1,х2,х3, ... хn, где х1 – характеристика основной группы (она всегда равна единице, так как ей предшествует совокупность передач с одной скоростью); х2 – характеристика первой переборной группы (она равна числу передач в основной группе, т.е. х2=р1); х3 – характеристика второй переборной (она равна произведению передач в основной и первой переборной группе х3=р1·р2) и так далее: х = р1·р2...рn.
Примем следующую структурную формулу:
Z = 2·3·2·3=21.
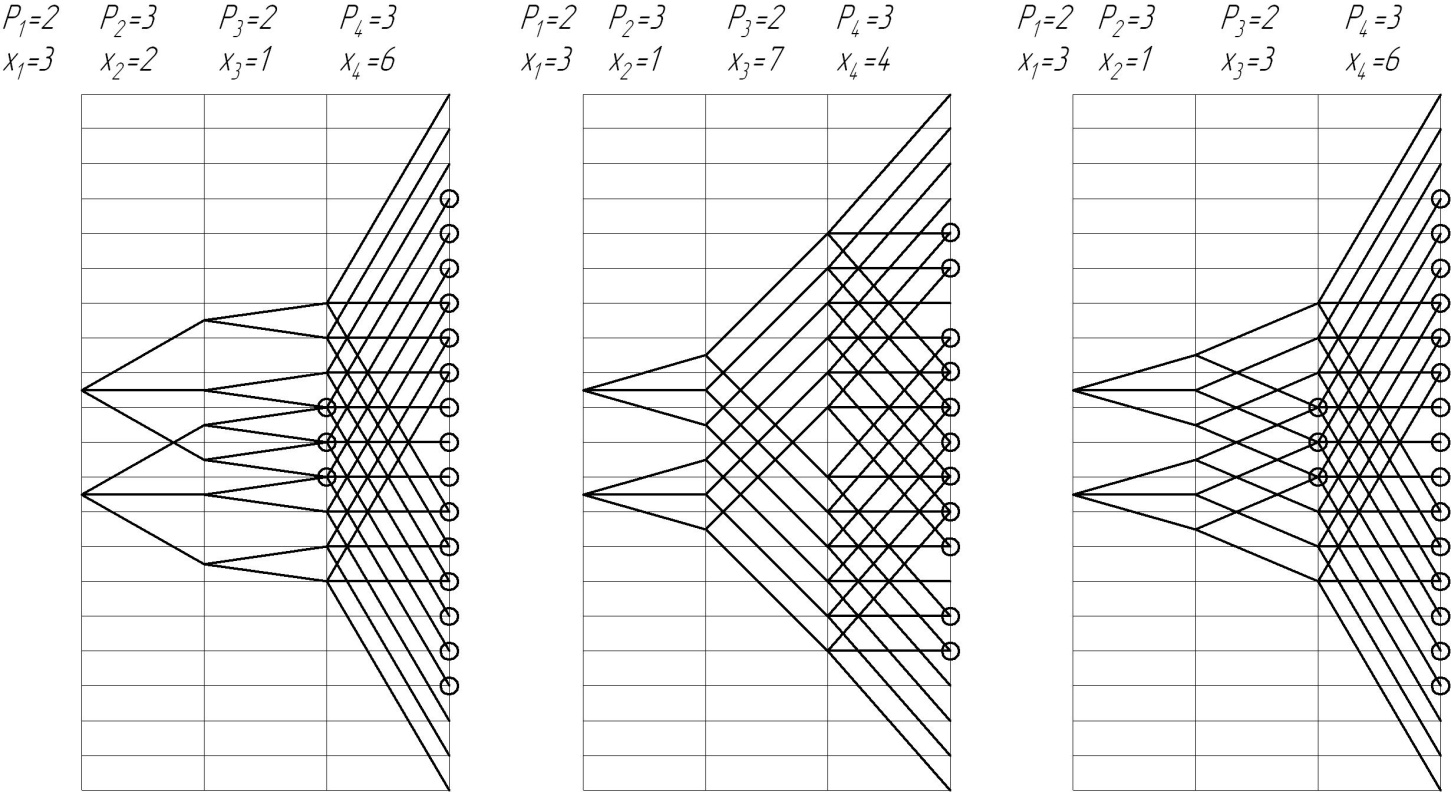
Рис 4. Структурные сетки рассматриваемых вариантов
Построенные структурные сетки (рис. 4) анализируются на возможность их использования по следующему критерию:
φх ≤С для приводов главного движения,
где φх - расстояние в форме φ между двумя лучами, исходящими из одной точки в каждой группе передач.
Из множества возможных вариантов порядка расположения и переключения групповых передач выбираем вариант при котором вес и габариты проектируемого привода минимальны.
Исходя из вышесказанного, выбираем структурную схему Z=2[3]·3[1]·2[7]·3[4]=21.
Проверяем осуществимость принятого варианта структуры привода по диапазону регулирования группы по условию:


 - требуемое условие
выполняется, принятый вариант осуществим.
- требуемое условие
выполняется, принятый вариант осуществим.
1.3. Построение структурной сетки проектируемого привода
Исходя из вышесказанного, стоим структурную схему (Z=2[3]·3[1]·2[7]·3[4]=21) привода главного движения проектируемого станка рис. 5.

Рис. 5. Структурная схема проектируемого станка
1.4. Построение графика частот вращения проектируемого привода
При выборе электродвигателя, стараемся приблизить частоту вращения к максимальной частоте вращения привода. Учитываем так же, что число понижающих интервалов равно 6, а повышающих - 3 для коробки скоростей с показателем геометрического ряда φ = 1,26. Выбираем двигатель 4АI32M8/4УЗ с nдв.=750/1500 мин-1, N =4,2/7,1 кВт. Строим график скоростей привода главного движения проектируемого станка рис. 6.
-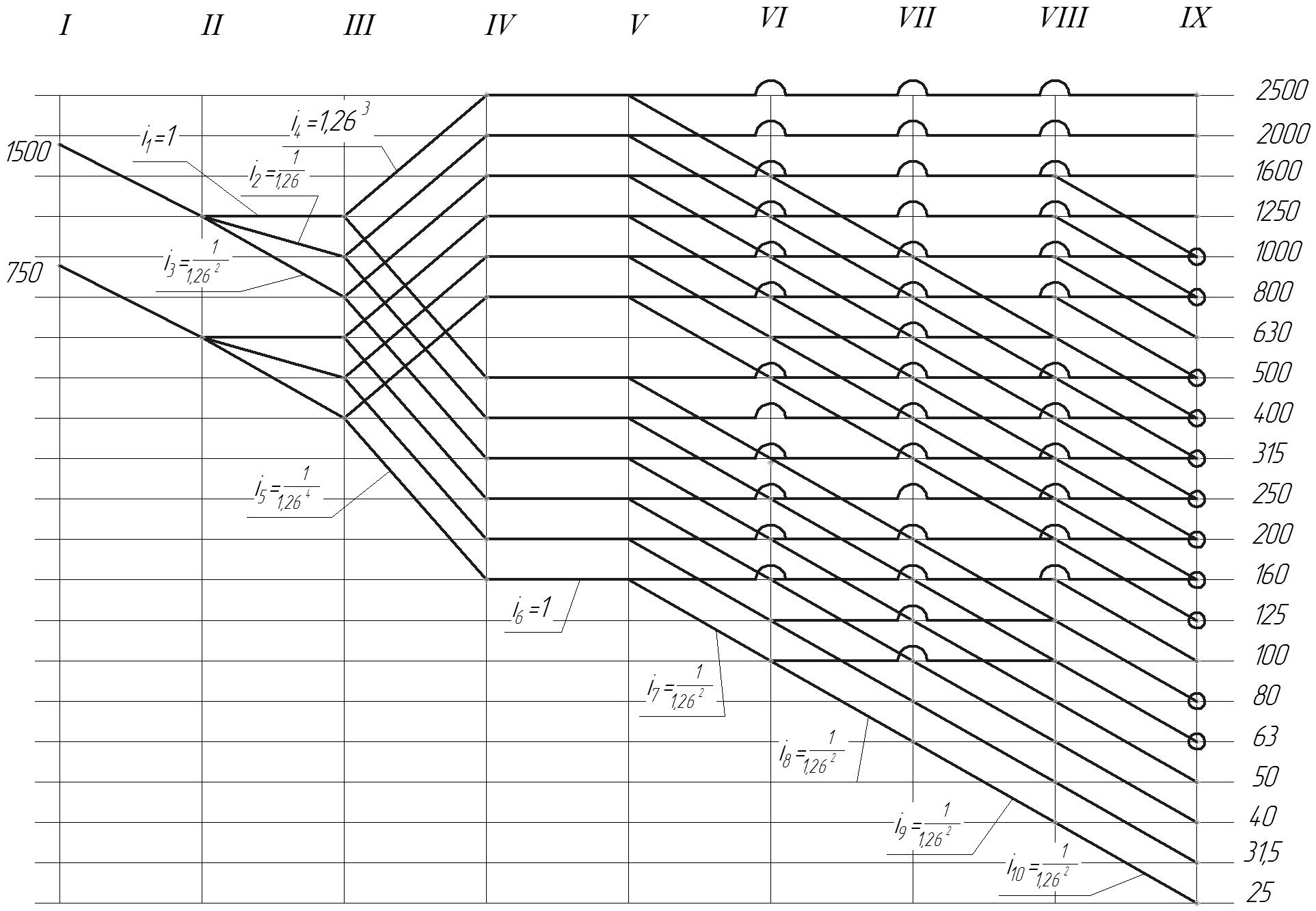
Рис 6. График скоростей проектируемого станка
1.5. Определение передаточных отношений и расчет чисел шестерен (диаметра шкивов)
Сумму зубьев в группе следует принимать от 60 до 120, помня о том, что наименьшее число зубьев шестерни должно быть не меньше 18.
Исходя из графика скоростей проектируемого привода рис. 6 рассчитываем передаточные отношения.
Определяем диаметр ведущего шкива по уравнению:

В станкостроении для универсальных станков среднего типоразмера диаметры шкивов менее 63 мм нежелательны, примем минимальный диаметр по гост 1284.3-96, .
Диаметр ведомого шкива определяем по уравнению:
