

Федеральное агентство по образованию

Государственное образовательное учреждение
высшего профессионального образования
Санкт-Петербургский государственный технологический институт (Технический университет)

Кафедра автоматизации процессов химической промышленности
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
УРОВНЯ ЖИДКОСТИ
Методические указания
к учебно-исследовательской лабораторной работе 2 по курсу
«Автоматика и автоматизация производственных процессов»
Санкт-Петербург
2006
Составители:
канд. техн. наук, ассист. Г. Н. Никищенкова, канд. техн. наук, доц. Ю. В. Сметанин, канд. техн. наук, доц. Д. В. Беляев (отв. ред.), канд. техн. наук, ст. преп. Ю. В. Якобсон.
В создании лабораторной установки принимал участие мл. науч. сотр. Ю. Н. Макаров.
Утверждено в качестве методических указаний для студентов дневного и вечернего отделений на заседании учебно-методической комиссии III—VIII факультетов ЛТИ им. Ленсовета 3.02.1984 г.
1. Цель лабораторной работы
Цель работы — ознакомление с приборами для измерения расхода и уровня, регулирующей аппаратурой, методикой экспериментального и аналитического определений динамических характеристик одноемкостного объекта без самовыравнивания, методикой определения оптимальных настроек регулятора.
На лабораторной установке студенты проводят учебно-исследовательскую работу по определению свойств объектов регулирования и изучению влияния настроечных параметров регулятора на качество переходных процессов в автоматической системе регулирования (АСР) уровня.
2. Основные виды аср уровня жидкостей
В зависимости от того, является ли уровень жидкости основным или вспомогательным параметром управления, к его АСР предъявляются различные требования. Например, в системе автоматизации процесса выпаривания или абсорбции уровень раствора в выпарном аппарате или абсорбере является основным параметром, так как его значение будут определять тепловой и гидродинамический режимы работы агрегатов. В этих случаях АСР уровня должна обеспечивать максимальное качество регулирования уровня.
К числу объектов, в которых уровень является вспомогательным параметром, относятся напорные или буферные емкости, промежуточные и складские сборники, баки-хранилища и т. п. Основные задачи АСР в этих случаях — обеспечение наличия жидкости в заданных пределах изменения уровня, контроль и регулирование заполнения или опорожнения емкостей, а также обеспечение заданного расхода на выходе независимо от любых возмущений по расходу со стороны притока или истечения жидкости из аппарата.
В большинстве случаев уровень регулируется изменением расхода жидкости на входе или выходе объекта с помощью дроссельных регулирующих органов или насосов переменной производительности. Выбор способа регулирования зависит от назначения технологических аппаратов и режимов их работы.
Для регулирования уровня в емкостях применяются позиционные АСР, обеспечивающие поддержание его в заданных пределах при достаточно широком диапазоне крайних значений. Если в работе объекта возможны значительные изменения нагрузки (по расходу), а по технологическим требованиям необходимо получить максимально высокое качество регулирования, то применяются более совершенные пропорционально-интегральные (изодромные) регуляторы.
3. РАСЧЕТ И АНАЛИЗ АВТОМАТИЧЕСКИХ СИСТЕМ
РЕГУЛИРОВАНИЯ
Основными элементами автоматических систем регулирования являются объект регулирования, источник информации о его состоянии, регулирующее устройство (регулятор и регулирующий орган). Свойства системы в первую очередь определяются характеристиками объекта, поэтому изучение и определение характеристик объектов регулирования являются важными этапами разработки АСР.
3.1 Аналитическое определение динамических характеристик
объекта регулирования
Аналитическое определение динамических свойств объекта заключается в исследовании уравнения переходного процесса [1, 2]. Переходный процесс в объекте характеризует изменение во времени выходной величины от момента нанесения возмущающего или регулирующего воздействия до прихода объекта в новое равновесное состояние (установившийся режим).
В данной лабораторной работе объектом регулирования является емкость с постоянным по высоте сечением F (м2). Приток воды в емкость равен Qпр (м3/с), а расход — Qр (м3/с), причем вода из емкости откачивается насосом (рисунок 1). При Qпр = Qp уровень воды в емкости Н (м) не изменяется (равновесное состояние). Если же Qnp превысит Qp, то количество воды в емкости начнет увеличиваться, уровень возрастает, причем новое равновесное состояние не наступит. Такие объекты называются объектами без самовыравнивания.
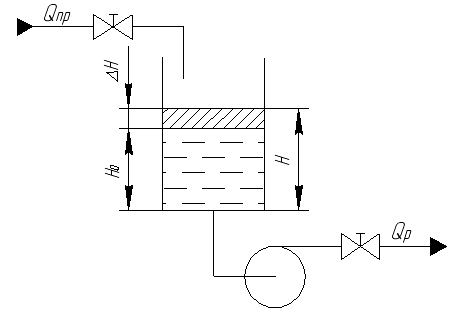
Рисунок 1 - Гидравлический объект регулирования без самовыравнивания
При составлении уравнения переходного процесса для емкости в качестве выходной величины принимается изменение уровня воды Н, в качестве входной (возмущающее воздействие) — изменение расхода воды Qp.
Количество воды, поступившее в емкость за бесконечно малый промежуток времени dτ, равно сумме количеств вытекшей жидкости и накопившейся в объекте за тот же промежуток времени вследствие приращения уровня dH. Таким образом, уравнение материального баланса за бесконечно малый промежуток времени dτ будет иметь вид
![]() .
.
Заменяя переменные величины в уравнении их конечными приращениями, отнесенными к базовым значениям этих переменных, соответствующим равновесному состоянию Но и Qp0, и учитывая, что ΔQпр = 0, получим
![]() .
(1)
.
(1)
Обозначим
![]() ,
,
![]() ,
,
![]() . (2)
. (2)
Тогда уравнение (1) будет иметь вид
![]() ,
(3)
,
(3)
где ε — постоянный коэффициент (с-1), называемый скоростью разгона, под которой понимается скорость изменения выходной величины φ при скачкообразном изменении входной величины f, равном единице.
Решение уравнения (3) при произвольном изменении входной величины имеет вид
![]() ,
,
а при скачкообразном изменении, равном f,
![]() .
(4)
.
(4)
Знак «минус» в уравнении (4) указывает на то, что при увеличении возмущения регулируемая выходная величина уменьшается.
При наличии и возмущающего (изменение расхода воды из емкости) и регулирующего (изменение притока воды в емкость) воздействий уравнение динамики объекта без самовыравнивания имеет вид
![]() ,
(5)
,
(5)
где
![]() — относительное изменение приращения
регулирующего воздействия.
— относительное изменение приращения
регулирующего воздействия.