36. Постановка задачи Калмановского оценивания сигнала.
Винеровская оценка коэф-тов КИХ-фильтров требует полного пересчета всех авто- и взаимокорреляционных матриц для каждой новой выборки, что с вычислит т.з. нерационально. Если иметь дело с продолжительным рядом отсчетов вх сигнала, значительно более удобными являются рекуррентные алгоритмы получения оценок, вносящие коррекцию на каждом шаге итерационного процесса.
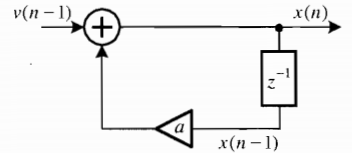
По существу, калмановское оценивание реализует рекурсивную процедуру адаптации. Основанную на авторегрессионной модели процесса генерирования сигнала. Если вх сигнал x(n) явл случ и марковским, то его можно представить в виде выхода ЛДС первого порядка, возбуждаемой белым шумом v(n) с нулевым средним и дисперсией σ2w. Модель генерирования сигнала описывается разностным уравнением 1го порядка.
![]() (28.1)
(28.1)
Устройство генерирования случ сигнала:
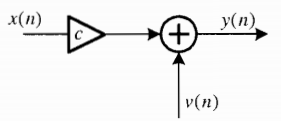
После прохождения канала связи вх сигнал претерпевает амплитудные изменения, описываемые пост коэф-том с, и на него воздействовал аддитивный белый шум v(n). Модель взаимодействия канала на сигнал описываается уравнением: y(n)=cx(n)+ v(n). (28.2)
Модель прохождения сигнала по каналу связи:
Зашумленный сигнал y(n) поступает на вход синтезируемого адаптивного калмановского фильтра. На его выходе необходимо получить рекуррентную оценку x^(n), максимально близкую к сигналу x(n) по критерию МНК.
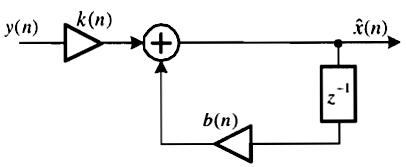
37. Структурная схема Калмановского фильтра. Формулы для расчёта его коэффициентов.

(28.4) – ошибка оценки
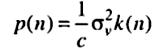
(28.5) – среднеквадратич ошибка
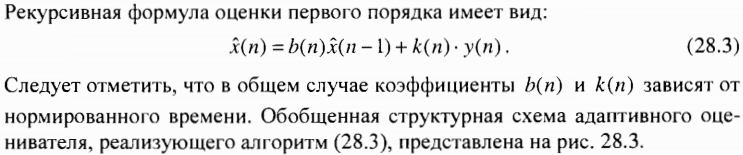
(28.3)
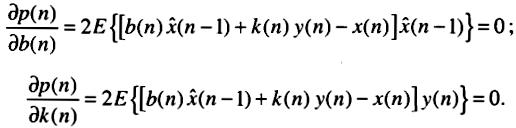
в (28.5): -

Данное выражение дифф-ся по b(n) и k(n) с последующим приравниванием к нулю:


Учитывая,
что
![]() и
с учетом (28.4),
получим:
и
с учетом (28.4),
получим:
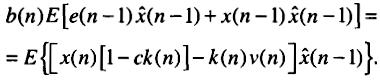
Принцип орготональности, кот минимизирует ошибку, требует некоррелированности ошибки e(n) и оценки x^(n-1), а также независимости шума и x^(n-1), что выполняется в рамках сделанных предположений. Это означает выполнение равенств:

![]()
Тогда предыдущее уравнение примет вид
![]()
Подставив сюда (28.1), получим:
 (28.15)
(28.15)
(28.1)
в (28.2) и в (28.3):
 (28.16)
(28.16)
Умножим обе части на w(n-1) и возьмем мат. Ожидание:
![]() (28.17)
(28.17)
Т.к. шум w(n-1) некоррелирован со всеми членами в правой части (28.16).
Преобразуем (28.15) исходя из (28.17)
![]()
Отсюда:
![]() (28.18).
(28.18).
(28.18)
в (28.3) -->
![]()
Это уравнение явл искомым решением для построения адаптивного рекурсивного оценивателя 1го порядка, называемого скалярным фильтром Калмана.
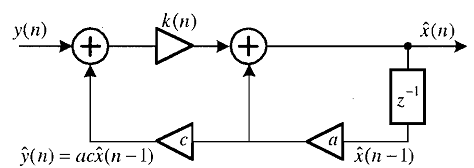
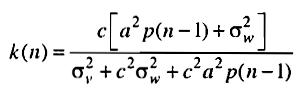
Адаптация здесь происходит след образом: предыдущая оценка x^(n-1) после умножения на коэф-ты а и с предсказывает очередной отсчет зашумленного сигнала y^(n). Последний сравнивается с текущим отсчетом y(n). Разница между ними с коэф-том «доверия» k(n) суммируется с предсказанной оценкой а x^(n-1), в рез-те чего получается текущая оценка x^(n). Изменяющийся во времени k(n) должен зависеть от шумовых параметров модели и текущего значения среднеквадратич ошибки p(n).