

Лекция 8. Нейронные сети. Типы нс. Обучение нс. Применение нс.
Рекуррентные нейронные сети
Рекуррентными нейронными сетями называются такие сети, в которых выходы нейронных элементов последующих слоев имеют синаптические соединения с нейронами предшествующих слоев. Это приводит к возможности учета результатов преобразования нейронной сетью информации на предыдущем этапе для обработки входного вектора на следующем этапе функционирования сети. Рекуррентные сети могут использоваться для решения задач прогнозирования и управления.
Архитектура рекуррентных сетей
Существуют различные варианты архитектур рекуррентных нейронных сетей.
Сеть Джордана: В 1986 г. Джордан (Jordan) предложил рекуррентную сеть (рис.8.1), в которой выходы нейронных элементов последнего слоя соединены посредством специальных входных нейронов с нейронами промежуточного слоя. Такие входные нейронные элементы называются контекстными нейронами (context units). Они распределяют выходные данные нейронной сети на нейронные элементы промежуточного слоя.
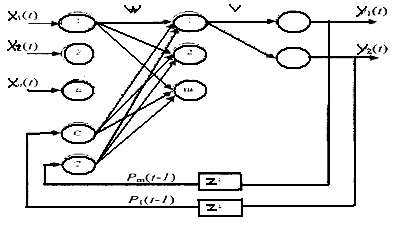
Рис. 8.1 Архитектура рекуррентной нейронной сети с обратными связями от нейронов выходного слоя
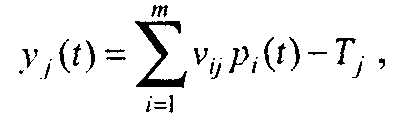
Число контекстных нейронов равняется числу выходных нейронных элементов рекуррентной сети. В качестве выходного слоя таких сетей используются нейронные элементы с линейной функцией активации. Тогда выходное значение j-го нейронного элемента последнего слоя определяется по формуле
 (8.1)
(8.1)
где vij - весовой коэффициент между i-м нейроном промежуточного и j-м нейроном выходного слоев; Pi(t)- выходное значение i-го нейрона промежуточного слоя; tj - пороговое значение j-го нейрона выходного слоя. Взвешенная сумма i-гo нейронного элемента промежуточного слоя определяется следующим образом:
 (8.2)
(8.2)
где wij – весовой коэффициент между j-м нейроном входного и i-м нейроном промежуточного слоев; р – число нейронов выходного слоя; wki – весовой коэффициент между k-м контекстным нейроном и i-м нейроном промежуточного слоя; T – пороговое значение i-го нейрона промежуточного слоя; n – размерность входного вектора.
Тогда выходное значение i-го нейрона скрытого слоя:
![]() (8.3)
(8.3)
В качестве функции нелинейного преобразования F обычно используется гиперболический тангенс или сигмоидная функция.
Для обучения рекуррентных нейронных сетей применяется алгоритм обратного распространения ошибки (будет рассмотрен ниже).
Алгоритм обучения рекуррентной нейронной сети в общем случае состоит из следующих шагов:
1. В начальный момент времени t = 1 все контекстные нейроны устанавливаются в нулевое состояние – выходные значения приравниваются нулю.
2. Входной образ подается на сеть и происходит прямое распространение его в нейронной сети.
3. В соответствии с алгоритмом обратного распространения ошибки модифицируются весовые коэффициенты и пороговые значения нейронных элементов.
4. Устанавливается t = t+1 и осуществляется переход к шагу 2. Обучение рекуррентной сети производится до тех пор, пока суммарная среднеквадратичная ошибка сети не станет меньше заданной.
Рециркуляционные нейронные сети
Рециркуляционные сети характеризуются как прямым Y = f(X), так и обратным X = f(У) преобразованием информации. Задача такого преобразования – достижение наилучшего автопрогноза или самовоспроизводимости вектора X. Рециркуляционные нейронные сети применяются для сжатия (прямое преобразование) и восстановления исходной (обратное преобразование) информации. Такие сети являются самоорганизующимися в процессе работы, где обучение производится без учителя.
Архитектура рециркуляционной нейронной сети
Рециркуляционная нейронная сеть представляет собой совокупность двух слоев нейронных элементов, которые соединены между собой двунаправленными связями (рис.8.2).
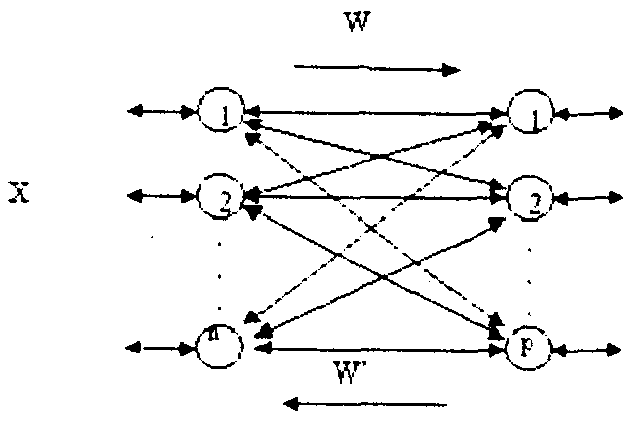
Рис.8.2 Архитектура рециркуляционной нейронной сети
Каждый из слоев нейронных элементов может использоваться в качестве входного или выходного. Если слой нейронных элементов служит в качестве входного, то он выполняет распределительные функции. Иначе нейронные элементы слоя являются обрабатывающими. Весовые коэффициенты, соответствующие прямым и обратным связям, характеризуются матрицей весовых коэффициентов W и W'. Для наглядности рециркуляционную сеть можно представить в развернутом виде, как показано на рис.8.3.
Такое представление сети является эквивалентным и характеризует полный цикл преобразования информации. При этом промежуточный слой нейронных элементов производит кодирование (сжатие) входных данных X, а последний слой – восстановление сжатой информации Y. Слой нейронной сети, соответствующий матрице связи W, назовем прямым, а соответствующий матрице связей W' – обратным.

Рис. 8.3 Эквивалентное представление рециркуляционной сети
В качестве функции активации нейронных элементов F может использоваться как линейная, так и нелинейная функции.
Релаксационные НС
Релаксационные нейронные сети характеризуются прямым и обратным распространением информации между слоями нейронной сети. В основе функционирования лежит итеративный принцип работы. На каждой итерации процесса происходит обработка данных, полученных на предыдущем шаге. Такая циркуляция информации продолжается до тех пор, пока не установится состояние равновесия. При этом состояния нейронных элементов перестают изменяться и характеризуются стационарными значениями.
Нейронные сети Хопфилда
Нейронная сеть Хопфилда реализует существенное свойство автоассоциативной памяти – восстановление по искаженному (зашумленному) образу ближайшего к нему эталонного. Входной вектор используется как начальное состояние сети, и далее сеть эволюционирует согласно своей динамике. Причем любой пример, находящийся в области притяжения хранимого образца, может быть использован как указатель для его восстановления. Выходной (восстановленный) образец устанавливается, когда сеть достигает равновесия.
Обучение сети Хопфилда производится по правилу Хебба.
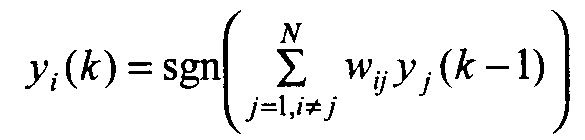
Структура сети Хопфилда (рис.8.4) состоит из одного слоя нейронов, число которых определяет число входов и выходов сети. Выход каждого нейрона соединен с входами всех остальных нейронов. Выходные сигналы нейронов являются одновременно входными сигналами сети: Xi(k)=Yi(k-1)
Основные зависимости, определяющие сеть Хопфилда, можно представить в виде
 (8.4)
(8.4)
с начальным условием yi(0) = xj. В процессе функционирования сети Хопфилда можно выделить два режима: обучения и классификации. В режиме обучения на основе известных обучающих выборок х подбираются весовые коэффициенты wij. В режиме классификации при зафиксированных значениях весов и вводе конкретного начального состояния нейронов у(0) = х возникает переходный процесс, протекающий в соответствии с выражением (Формула выше) и завершающийся в одном из локальных минимумов, для которого y(k) = y(k-l).
Для безошибочной работы сети Хопфилда число запоминаемых эталонов N не должно превышать 0,15n (n-число нейронов).
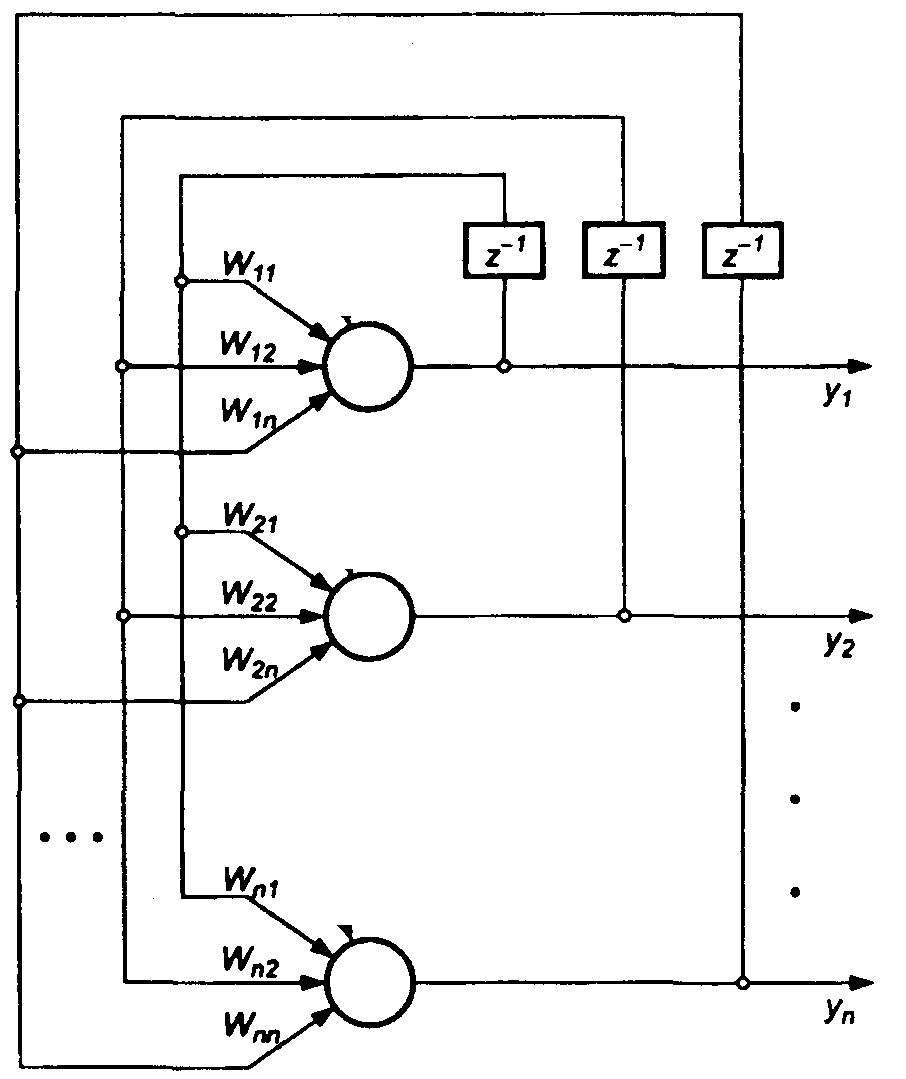
Рис. 8.4 Структура нейронной сети Хопфилда
ПОСТРОЕНИЕ НЕЙРОННОЙ СЕТИ
При построении модели ИНС прежде всего необходимо точно определить задачи, которые будут решаться с ее помощью. В настоящее время нейросетевые технологии успешно применяются для прогнозирования, распознавания и обобщения.
Первым этапом построения нейросетевой модели является тщательный отбор входных данных, влияющих на ожидаемый результат. Из исходной информации необходимо исключить все сведения, не относящиеся к исследуемой проблеме. В то же время следует располагать достаточным количеством примеров для обучения ИНС. Существует эмпирическое правило, которое устанавливает рекомендуемое соотношение X между количеством обучающих примеров, содержащих входные данные и правильные ответы, и числом соединений в нейронной сети: X <10.
Для факторов, которые включаются в обучающую выборку, целесообразно предварительно оценить их значимость, проведя корреляционный и регрессионный анализ, и проанализировать диапазоны их возможных изменений.
На втором этапе осуществляется преобразование исходных данных с учетом характера и типа проблемы, отображаемой нейросетевой моделью, и выбираются способы представления информации. Эффективность нейросетевой модели повышается, если диапазоны изменения входных и выходных величин приведены к некоторому стандарту, например [0,1] или [-1,1].
Третий этап заключается в конструировании ИНС, т.е. в проектировании ее архитектуры (число слоев и число нейронов в каждом слое). Структура ИНС формируется до начала обучения, поэтому успешное решение этой проблемы во многом определяется опытом и искусством аналитика, проводящего исследования.
Четвертый этап связан с обучением сети, которое может проводиться на основе конструктивного или деструктивного подхода. В соответствии с первым подходом обучение ИНС начинается на сети небольшого размера, который постепенно увеличивается до достижения требуемой точности по результатам тестирования. Деструктивный подход базируется на принципе «прореживания дерева», в соответствии с которым из сети с заведомо избыточным объемом постепенно удаляют «лишние» нейроны и примыкающие к ним связи. Этот подход дает возможность исследовать влияние удаленных связей на точность сети. Процесс обучения нейронной сети представляет собой уточнение значений весовых коэффициентов для отдельных узлов на основе постепенного увеличения объема входной и выходной информации. Началу обучения должна предшествовать процедура выбора функции активации нейронов, учитывающая характер решаемой задачи. В частности, в трехслойных перцептронах на нейронах скрытого слоя применяется в большинстве случаев логистическая функция, а тип передаточной функции нейронов выходного слоя определяется на основе анализа результатов вычислительных экспериментов на сети. Индикатором обучаемости ИНС может служить гистограмма значений межнейронных связей.
На пятом этапе проводится тестирование полученной модели ИНС на независимой выборке примеров.
ОБУЧЕНИЕ НЕЙРОННЫХ СЕТЕЙ
Важнейшим свойством нейронных сетей является их способность к обучению, что делает нейросетевые модели незаменимыми при решении задач, для которых алгоритмизация является невозможной, проблематичной или слишком трудоемкой. Обучение нейронной сети заключается в изменении внутренних параметров модели таким образом, чтобы на выходе ИНС генерировался вектор значений, совпадающий с результатами примеров обучающей выборки. Изменение параметров нейросетевой модели может выполняться разными способами в соответствии с различными алгоритмами обучения. Парадигма обучения определяется доступностью необходимой информации. Выделяют три парадигмы:
обучение с учителем (контролируемое);
обучение без учителя (неконтролируемое);
смешанное обучение.
При обучении с учителем все примеры обучающей выборки содержат правильные ответы (выходы), соответствующие исходным данным (входам). В процессе контролируемого обучения синаптические веса настраиваются так, чтобы сеть порождала ответы, наиболее близкие к правильным.
Обучение без учителя используется, когда не для всех примеров обучающей выборки известны правильные ответы. В этом случае предпринимаются попытки определения внутренней структуры поступающих в сеть данных с целью распределить образцы по категориям (модели Кохонена).
При смешанном обучении часть весов определяется посредством обучения с учителем, а другая часть получается с помощью алгоритмов самообучения.
Обучение по примерам характеризуется тремя основными свойствами: емкостью, сложностью образцов и вычислительной сложностью. Емкость соответствует количеству образцов, которые может запомнить сеть. Сложность образцов определяет способности нейронной сети к обучению. В частности, при обучении ИНС могут возникать состояния «перетренировки», в которых сеть хорошо функционирует на примерах обучающей выборки, но не справляется с новыми примерами, утрачивая способность обучаться.
Рассмотрим известные правила обучения ИНС.
Правило коррекции по ошибке. Процесс обучения ИНС состоит в коррекции исходных значений весовых коэффициентов межнейронных связей, которые обычно задаются случайным образом. При вводе входных данных запоминаемого примера (стимула) появляется реакция, которая передается от одного слоя нейронов к другому, достигая последнего слоя, где вычисляется результат. Разность между известным значением результата и реакцией сети соответствует величине ошибки, которая может использоваться для корректировки весов межнейронных связей. Корректировка заключается в небольшом (обычно менее 1%) увеличении синаптического веса тех связей, которые усиливают правильные реакции, и уменьшении тех, которые способствуют ошибочным. Это простейшее правило контролируемого обучения (дельта-правило) используется в однослойных сетях с одним уровнем настраиваемых связей между множеством входов и множеством выходов.
Оптимальные значения весов межнейронных соединений можно определить путем минимизации среднеквадратичной ошибки с использованием детерминированных или псевдослучайных алгоритмов поиска экстремума в пространстве весовых коэффициентов. При этом возникает традиционная проблема оптимизации, связанная с попаданием в локальный минимум (будет рассмотрена ниже).
Правило Хебба. Оно базируется на следующем нейрофизиологическом наблюдении: если нейроны по обе стороны синапса активизируются одновременно и регулярно, то сила их синаптической связи возрастает. При этом изменение веса каждой межнейронной связи зависит только от активности нейронов, образующих синапс. Это существенно упрощает реализацию алгоритмов обучения.
Обучение методом соревнования. В отличие от правила Хебба, где множество выходных нейронов может возбуждаться одновременно, в данном случае выходные нейроны соревнуются (конкурируют) между собой за активизацию. В процессе соревновательного обучения осуществляется модификация весов связей выигравшего нейрона и нейронов, расположенных в его окрестности («победитель забирает все»).
Рассмотрим один из наиболее распространенных алгоритмов обучения с учителем, относящийся к правилу коррекции по ошибке. Алгоритм обратного распространения ошибки
В многослойных нейронных сетях оптимальные выходные значения нейронов всех слоев, кроме последнего, как правило, неизвестны. Трех- или более слойный персептрон уже невозможно обучить, руководствуясь только величинами ошибок на выходах сети.
Один из вариантов решения этой проблемы – разработка наборов выходных сигналов, соответствующих входным, для каждого слоя нейронной сети, что, конечно, является очень трудоемкой операцией и не всегда осуществимо. Второй вариант – динамическая подстройка весовых коэффициентов синапсов, в ходе которой выбираются, как правило, наиболее слабые связи и изменяются на малую величину в ту или иную сторону, а сохраняются только те изменения, которые повлекли уменьшение ошибки на выходе всей сети. Очевидно, что данный метод, несмотря на кажущуюся простоту, требует громоздких рутинных вычислений. И, наконец, третий, более приемлемый вариант – распространение сигналов ошибки от выходов нейронной сети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Этот алгоритм обучения получил название процедуры обратного распространения ошибки (error back propagation). Именно он рассматривается ниже.
Алгоритм обратного распространения ошибки – это итеративный градиентный алгоритм обучения, который используется с целью минимизации среднеквадратичного отклонения текущих от требуемых выходов многослойных нейронных сетей с последовательными связями.
Согласно методу наименьших квадратов, минимизируемой целевой функцией ошибки нейронной сети является величина:
![]() (8.5)
(8.5)
где
![]() – реальное выходное состояние нейрона
у
выходного слоя нейронной сети при подаче
на ее входы k-го
образа; dj,k
– требуемое выходное состояние этого
нейрона.
– реальное выходное состояние нейрона
у
выходного слоя нейронной сети при подаче
на ее входы k-го
образа; dj,k
– требуемое выходное состояние этого
нейрона.
Суммирование ведется по всем нейронам выходного слоя и по всем обрабатываемым сетью образам. Минимизация методом градиентного спуска обеспечивает подстройку весовых коэффициентов следующим образом:
![]() (8.6)
(8.6)
где wij – весовой коэффициент синаптической связи, соединяющей i-й нейрон слоя (q-1) с j-м нейроном слоя q; η – коэффициент скорости обучения, 0 < η <1.
В соответствии с правилом дифференцирования сложной функции:
![]() , (8.7)
, (8.7)
где sj – взвешенная сумма входных сигналов нейрона j, т.е. аргумент активационной функции. Так как производная активационной функции должна быть определена на всей оси абсцисс, то функция единичного скачка и прочие активационные функции с неоднородностями не подходят для рассматриваемых нейронных сетей. В них применяются такие гладкие функции, как гиперболический тангенс или классический сигмоид с экспонентой (см. табл.7.1). Например, в случае гиперболического тангенса:
![]() (8.8)
(8.8)
Третий множитель ∂sj
/ ∂wij
равен выходу нейрона предыдущего слоя
![]() .
.
Что касается первого множителя в (8.7), он легко раскладывается следующим образом:
![]() (8.8)
(8.8)
Здесь суммирование по r выполняется среди нейронов слоя (q+1). Введя новую переменную
![]() (8.9)
(8.9)
получим рекурсивную формулу
для расчетов величин
![]() слоя
q
из величин
слоя
q
из величин
![]() более старшего слоя (q+1):
более старшего слоя (q+1):
![]() (8.10)
(8.10)
Для выходного слоя:
![]() (8.11)
(8.11)
Теперь можно записать (8.6) в раскрытом виде:
![]() (8.12)
(8.12)
Иногда для придания процессу коррекции весов некоторой инерционности, сглаживающей резкие скачки при перемещении по поверхности целевой функции, (8.12) дополняется значением изменения веса на предыдущей итерации:
![]() (8.13)
(8.13)
где µ – коэффициент инерционности; t – номер текущей итерации.
Таким образом, полный алгоритм обучения нейронной сети с помощью процедуры обратного распространения строится следующим образом.
ШАГ 1. Подать на входы сети один из возможных образов и в режиме обычного функционирования нейронной сети, когда сигналы распространяются от входов к выходам, рассчитать значения последних. Напомним, что:
![]() (8.14)
(8.14)
где L
– число нейронов в слое
(q-1)
с учетом нейрона с постоянным выходным
состоянием +1, задающего смещение;
![]() –
i-й
вход нейрона j
слоя q.
–
i-й
вход нейрона j
слоя q.
![]() (8.15)
(8.15)
где f(•)-сигмоид,
![]() , (8.16)
, (8.16)
где хr – r-я компонента вектора входного образа.
ШАГ 2. Рассчитать δ(Q) для выходного слоя по формуле (8.11).
Рассчитать по формуле (8.12) или (8.13) изменения весов ∆w(Q) слоя Q (последнего слоя).
ШАГ 3. Рассчитать по формулам (8.10) и (8.12) соответственно δ(Q) и ∆w(Q) для всех остальных слоев, q = (Q – 1)…1.
ШАГ 4. Скорректировать все веса в нейронной сети:
![]() (8.17)
(8.17)
ШАГ 5. Если ошибка сети существенна, перейти на шаг 1. В противном случае – конец.
Сети на шаге 1 попеременно в случайном порядке предъявляются все тренировочные образы, чтобы сеть, образно говоря, не забывала одни по мере запоминания других.
Из выражения (8.12)
следует, что когда
выходное значение
![]() стремится к нулю, эффективность обучения
заметно снижается. При двоичных входных
векторах в среднем половина весовых
коэффициентов не будет корректироваться,
поэтому область возможных значений
выходов нейронов (0, 1) желательно сдвинуть
в пределы (-0,5, 0,5), что достигается простыми
модификациями логистических функций.
Например, сигмоид с экспонентой
преобразуется к виду:
стремится к нулю, эффективность обучения
заметно снижается. При двоичных входных
векторах в среднем половина весовых
коэффициентов не будет корректироваться,
поэтому область возможных значений
выходов нейронов (0, 1) желательно сдвинуть
в пределы (-0,5, 0,5), что достигается простыми
модификациями логистических функций.
Например, сигмоид с экспонентой
преобразуется к виду:
![]() (8.18)
(8.18)
Рассмотрим вопрос о емкости нейронной сети, т.е. числа образов, предъявляемых на ее входы, которые она способна научиться распознавать. Для сетей с числом слоев больше двух этот вопрос остается открытым. Для сетей с двумя слоями детерминистская емкость сети Cd оценивается следующим образом:
![]() (8.19)
(8.19)
где Lw - число подстраиваемых весов, т - число нейронов в выходном слое.
Данное выражение получено с учетом некоторых ограничений. Во-первых, число входов n и нейронов в скрытом слое L должно удовлетворять неравенству (n+L) > m. Во-вторых, Lw/m > 1000. Однако приведенная оценка выполнена для сетей с пороговыми активационными функциями нейронов, а емкость сетей с гладкими активационными функциями, например (8.18), обычно больше. Кроме того, термин детерминистский означает, что полученная оценка емкости подходит для всех входных образов, которые могут быть представлены n входами. В действительности распределение входных образов, как правило, обладает некоторой регулярностью, что позволяет нейронной сети проводить обобщение и, таким образом, увеличивать реальную емкость. Так как распределение образов, в общем случае, заранее неизвестно, можно говорить о реальной емкости только предположительно, но обычно она раза в два превышает детерминистскую емкость.
Проблема локального минимума.
Рассматриваемая нейронная
сеть имеет несколько «узких мест».
Во-первых, в процессе большие положительные
или отрицательные значения весов могут
сместить рабочую точку на сигмоидах
нейронов в область насыщения. Малые
величины производной от логистической
функции приведут в соответствии с (8.10)
и (8.12) к остановке обучения, что парализует
сеть (![]() ).
Во-вторых, применение метода градиентного
спуска не гарантирует нахождения
глобального минимума целевой функции
(в данном случае – функции ошибки).
Находя на функции ошибки минимум,
обучение останавливается. Но этот
минимум по своему значению может быть
слишком велик. Например, необходима
ошибка в 0.01, а обучение остановилось на
ошибке 0.1. Нужно искать глобальный
минимум. Это тесно связано вопросом
выбора скорости обучения. Приращения
весов и, следовательно, скорость обучения
для нахождения экстремума должны быть
бесконечно малыми, однако в этом случае
обучение будет происходить неприемлемо
медленно, и с другой стороны, слишком
большие коррекции весов могут привести
к постоянной неустойчивости процесса
обучения. Поэтому в качестве коэффициента
скорости обучения η
обычно выбирается число
меньше 1 (например, 0,1), которое постепенно
уменьшается в процессе обучения. Кроме
того, для исключения случайных попаданий
сети в локальные минимумы иногда, после
стабилизации значений весовых
коэффициентов, η
кратковременно
значительно увеличивают, чтобы начать
градиентный спуск из новой точки. Если
повторение этой процедуры несколько
раз приведет сеть в одно и то же состояние,
можно предположить, что найден глобальный
минимум.
).
Во-вторых, применение метода градиентного
спуска не гарантирует нахождения
глобального минимума целевой функции
(в данном случае – функции ошибки).
Находя на функции ошибки минимум,
обучение останавливается. Но этот
минимум по своему значению может быть
слишком велик. Например, необходима
ошибка в 0.01, а обучение остановилось на
ошибке 0.1. Нужно искать глобальный
минимум. Это тесно связано вопросом
выбора скорости обучения. Приращения
весов и, следовательно, скорость обучения
для нахождения экстремума должны быть
бесконечно малыми, однако в этом случае
обучение будет происходить неприемлемо
медленно, и с другой стороны, слишком
большие коррекции весов могут привести
к постоянной неустойчивости процесса
обучения. Поэтому в качестве коэффициента
скорости обучения η
обычно выбирается число
меньше 1 (например, 0,1), которое постепенно
уменьшается в процессе обучения. Кроме
того, для исключения случайных попаданий
сети в локальные минимумы иногда, после
стабилизации значений весовых
коэффициентов, η
кратковременно
значительно увеличивают, чтобы начать
градиентный спуск из новой точки. Если
повторение этой процедуры несколько
раз приведет сеть в одно и то же состояние,
можно предположить, что найден глобальный
минимум.
Обобщение и переобучение
Рассмотрим проблемы обобщения и переобучения нейронной сети более подробно. Обобщение – это способность нейронной сети делать точный прогноз на данных, не принадлежащих исходному обучающему множеству. Переобучение же представляет собой чрезмерно точную подгонку, которая имеет место, если алгоритм обучения работает слишком долго, а сеть слишком сложна для такой задачи или для имеющегося объема данных
Продемонстрируем проблемы обобщения и переобучения на примере аппроксимации некоторой зависимости не нейронной сетью, а посредством полиномов, при этом суть явления будет абсолютно та же.
Графики полиномов могут иметь различную форму, причем, чем выше степень и число членов, тем более сложной может быть эта форма. Для исходных данных можно подобрать полиномиальную кривую (модель) и получить, таким образом, объяснение имеющейся зависимости. Данные могут быть зашумлены, поэтому нельзя считать, что лучшая модель в точности проходит через все имеющиеся точки. Полином низкого порядка может лучше объяснять имеющуюся зависимость, однако, быть недостаточно гибким средством для аппроксимации данных, в то время как полином высокого порядка может оказаться чересчур гибким, но будет точно следовать данным, принимая при этом замысловатую форму, не имеющую никакого отношения к настоящей зависимости.
Емкость сети
Вопрос о емкости нейронной сети тесно связан с вопросом о требуемой мощности выходного слоя сети, выполняющего окончательную классификацию образов. Например, для разделения множества входных образов по двум классам достаточно одного выходного нейрона. При этом каждый логический уровень («1» и «0») будет обозначать отдельный класс. На двух выходных нейронах с пороговой функцией активации можно закодировать уже четыре класса. Для повышения достоверности классификации желательно ввести избыточность, путем выделения каждому классу одного нейрона в выходном слое или, что еще лучше, нескольких, каждый из которых обучается определять принадлежность образа к классу со своей степенью достоверности, например, высокой, средней и низкой. Такие нейронные сети позволяют проводить классификацию входных образов, объединенных в нечеткие (размытые или пересекающиеся) множества. Это свойство приближает подобные сети к реальным условиям функционирования биологических нейронных сетей.
ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ НЕЙРОСЕТЕВЫХ ТЕХНОЛОГИЙ
Применение нейросетевых технологий целесообразно при решении задач, имеющих следующие признаки:
отсутствие алгоритмов решения задач при наличии достаточно большого числа примеров;
наличие большого объема входной информации, характеризующей исследуемую проблему;
зашумленность, частичная противоречивость, неполнота или избыточность исходных данных.
Нейросетевые технологии нашли широкое применение в таких направлениях, как распознавание печатного текста, контроль качества продукции на производстве, идентификация событий в ускорителях частиц, разведка нефти, борьба с наркотиками, медицинские и военные приложения, управление и оптимизация, финансовый анализ, прогнозирование и др.
В сфере экономики нейросетевые технологии могут использоваться для классификации и анализа временных рядов путем аппроксимации сложных нелинейных функций. Экспериментально установлено, что модели нейронных сетей обеспечивают большую точность при выявлении нелинейных закономерностей на фондовом рынке по сравнению с регрессионными моделями.
Рассмотрим решение задачи прогнозирования цены закрытия на завтра по акциям некоторого предприятия X. Для моделирования воспользуемся данными наблюдений за месяц. В качестве исходных данных можно использовать индикаторы Dow Jones, NIKKEI, FTSE100, индексы и акции российских компаний, «сезонные» переменные и др.
Относительный показатель однодневной доходности предприятия можно определить из соотношений:
![]()
![]() (8.20)
(8.20)
где ∆Pi – оценка операции «вчера купил, сегодня продал»;
-∆Pi – оценка операции «вчера продал, сегодня купил»;
Рi – значение выбранного показателя доходности в i-й день;
Pi-1 – значение показателя в (i-1)-й день.
Итоговая доходность за установленный интервал времени (n дней) рассчитывается по формуле
![]() (8.21)
(8.21)
Результаты оценки доходности предприятия с использованием различных моделей ИНС, а также доходов «идеального» трейдера приведены ниже.
Индикаторы Доходность