

2. Измерение крутящего момента (Мк). Динамометрические муфты
Фазометрические динамометры с индукционными преобразователями. Принципиальная схема включения с аналоговым выходом: основные элементы и их назначение. Временные диаграммы работы (принцип формирования выходного сигнала). Измеряемая величина (мера) (докажите, что измеряемая величина действительно прямо пропорциональна крутящему моменту). Источники погрешностей.
Особенности конструктивного исполнения. Реализация возможности градуировки при неподвижном вале или проведения измерений на малых частотах вращения. Преимущества и недостатки.
Сигналы U1 и U2 с ДУМ-1 и ДУМ-2 поступают на вход усилителей-ограничителей УО-1 и УО-2. Последние усиливают и ограничивают сигналы кодовых меток с целью более точного определения моментов перехода этих сигналов через нулевые значения. Напряжение U3 и U4 на выходе УО близки к прямоугольникам и имеют крутые передние и задние фронты. Эти сигналы дифференцируются с помощью дифференцирующих устройств (ДУ-1 и ДУ-2) и превращаются в остроконечные импульсы U5 и U6. Выпрямительные (вентильные) элементы пропускают только положительные импульсы. С помощью триггеров Т-1 и Т-2 остроконечные импульсы превращаются в прямоугольные импульсы (U7 и U8) с постоянной амплитудой и длительностью. Эти импульсы поступают в смеситель или триггер временного сдвига (ТВС), который формирует на выходе (U9) прямоугольные импульсы с напряжением (амплитудой U0) и длительностью Δτ, равной длительности временного сдвига сигналов кодирующих меток с обоих сечений базы времени. Эти импульсы имеют период Тс, равный периоду следования импульсов кодовых меток. После интегрирования сигнала U9 с помощью интегратора (U) на выходе появляется напряжение U10 пропорциональное отношению фазового сдвига Δτ к периоду следования импульсов Тс, т.о. получаем информативный сигнал пропорциональный углу закручивания вала φ и числу кодовых меток Z, что полностью отражает величину Мк.
Источники погрешностей: 1. Неточность первоначальной (НУ) установки меток углов на концах базы измерения. 2. Неидентичность нанесения кодовых меток (неточность деления) (НИ ДПУ). 3. Неидентичность каналов преобразования (ДУМ-УО-ДУ-Т) (НИКП). 4. Нестабильность крутизны фронтов запускающих импульсов (U7, U8).
3. Индицирование двс. Пьезоматериалы
Что такое пьезоэлектрики?
Пьезоэлектрики – кристаллические вещества, в которых при сжатии и растяжении (в определённых направлениях) возникает электрическая поляризация в отсутствии внешнего электрического поля. В результате этого на гранях элемента в определённых направлениях возникают электрические заряды.
Кристалл кварца и его оси. Физическая природа пьезоэффекта. Продольный и поперечный пьезоэффект. От каких факторов зависит выходной сигнал продольного и поперечного пьезоэффектов?
Кристалл кварца представляет собой шести гранную призму, в которой можно выделить 3 основные оси.
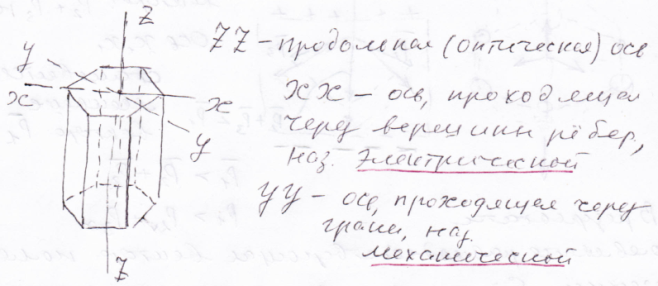
Рассмотрим природу пьезоэффекта на примере кристалла кварца, рассматривая форму элементарной кристаллической ячейки (точнее, рассматривая её проекцию на плоскость, перпендикулярную оси). В целом ячейка нейтральна, но в ней можно выделить 3 направления, проходящие через центр и соединяющие 2 разноимённых заряда (электрические оси).
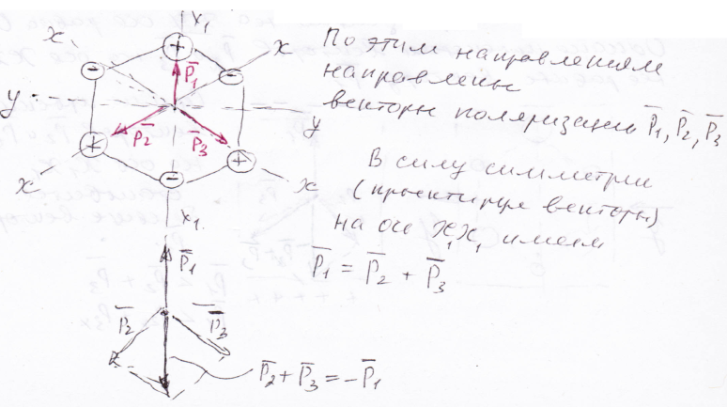
Если приложить усилие вдоль оси х1х1, то электрическая нейтральность ячейки нарушается в результате деформации электрической ячейки.

В результате появляется равнодействующая вектора поляризации. Ей соответствуют поляризационные заряды на гранях, перпендикулярные оси х1х1, знаки которых зависят от ориентации кристалла. Образование поляризационных зарядов на гранях, перпендикулярных оси х1х1, называется продольным пьезоэффектом. При механическом воздействии вдоль оси уу, геометрическая сумма векторов поляризации на эту ось равна 0. Однако проекции векторов Р2 и Р3 на ось хх не равны вектору Р1.
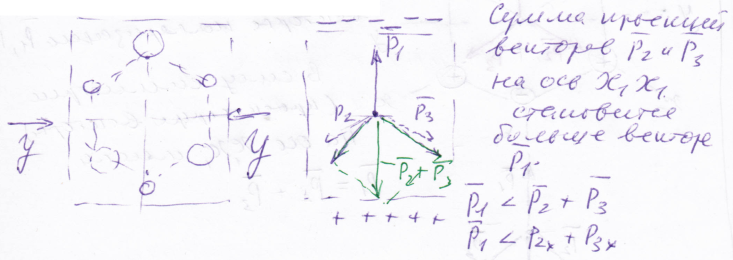
В результате равнодействующая вектора поляризации направлена в противоположную сторону по сравнению с предыдущим случаем. На нижней грани кристалла появляется «+» заряд, а на верхней «–» заряд. Образование поляризационных зарядов на гранях, перпендикулярно нагружаемым граням, называется поперечным пьезоэффектом.
Как должны быть ориентированы грани пластин, вырезаемых из кристалла кварца?
Из кристалла кварца вырезают пластину таким образом, чтобы наибольшая плоскость была бы перпендикулярна электрической оси хх.

 ,
где d1
– продольный пьезомодуль к/н. Величина
этого заряда не зависит от размеров
пластин. Если подвергнуть эту же пластину
сжатию в направлении оси уу, то на тех
же гранях вновь появится заряд
,
где d1
– продольный пьезомодуль к/н. Величина
этого заряда не зависит от размеров
пластин. Если подвергнуть эту же пластину
сжатию в направлении оси уу, то на тех
же гранях вновь появится заряд
 ,
поперечный пьезоэффект с тем же модулем
d1.
Но, в отличие от продольного эффекта,
поперечный пьезоэффект зависит от
соотношения b/a,
что позволяет изменять чувствительность
преобразователя.
,
поперечный пьезоэффект с тем же модулем
d1.
Но, в отличие от продольного эффекта,
поперечный пьезоэффект зависит от
соотношения b/a,
что позволяет изменять чувствительность
преобразователя.
В чём преимущества кварца в качестве пьезоматериала (4-6)?
1. Высокая механическая прочность. 2. Хорошие изоляционные свойства. 3. Сравнительно низкая зависимость от температуры (до 250…3500С почти не влияет). 4. Отсутствие гистерезиса. 5. Линейность характеристики (сохраняется при нагружении вплоть до разрушения), упругие свойства. 6. Широкое распространение и невысокая стоимость.
Что относится к влияющим факторам пьезоматериалов?
1. Температура (хотя по сравнению с упругими пьезоматериалами) у кварца её влияние меньше. 2. Влажность (из-за большого входного электрического сопротивления датчика). 3. Механические воздействия (особенно на соединительный кабель).
В каком диапазоне температур пьезокварц может применяться без охлаждения?
Для всех пьезоэлектриков характерно значение температуры, при которой их пьезоэлектрические свойства утрачиваются. Для кварца эта температура составляет 5500С (т.н. точка Кюри).
№ 5
1. Гидродинамические тормоза (ГДТ).
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости. В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь.
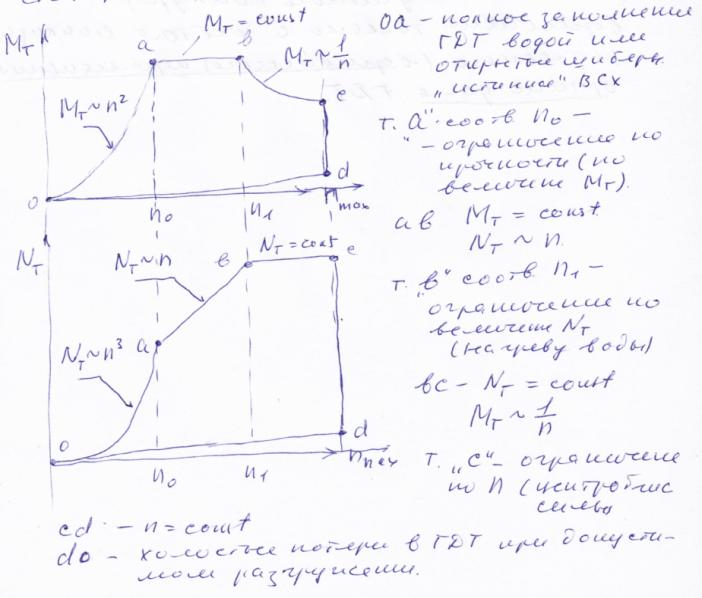
Внешняя скоростная характеристика (ВСХ) ГДТ с учётом ограничений.
Фактически ВСХ – зависимость NТ и МТ от n при полном или частичном ( с учётом ограничений) положения органа управления ГДТ. ВСХ позволяет судить о возможности применения ГДТ для торможения данного ДВС.
Относительный тормозной момент и относительная тормозная мощность в различных зонах ВСХ ГДТ.
Согласование характеристик ДВС и ГДТ с учётом возможных перемещений органа управления ГДТ (сравнение ГДТ переменного и постоянного заполнения).
Возможный диапазон поглощения мощности определяется замкнутым контуром, в пути которого должна располагаться ВСХ ДВС. Однако это условие является необходимым, но недостаточным для эффективного сопряжения ДВС и ГДТ. Частичные скоростные характеристики (ЧСХ) ГДТ лежат в пределах этого контура, что позволяет задавать различные и нагрузочные режимы ДВС. Но реальная оценка возможности регулирования ГДТ в указанных пределах возможна только с учётом анализа реального переменного органа регулирования ГДТ.
Задача №3.
Преимущества и недостатки ГДТ.
Преимущества: 1. относительная простота конструкции. 2. дешевизна изготовления и низкая стоимость эксплуатации. 3. высокая энергоёмкость (минимальные габаритные размеры при NT – idem по сравнению с другими типами тормозов). 4. высокая быстроходность. 5. нечувствительность к перегрузкам. 6. наименьший момент инерции ротора, т.е. уменьшение механической инерционности. Недостатки: 1. отсутствие рекуперации энергии. 2. необратимость. 3. ограниченный (низкий) диапазон регулирования (по сравнению с электрическими машинами). 4. сложность автоматизации. 5. невозможность разгружения до режима ХХ. 6. трудность изменения МТ по реакции статора.
Область применения.
ТК, Турбины.