

1. Гидродинамические тормоза (гдт). Лопастные и камерные гдт
ГДТ – тормоза, в которых поглощение мощности происходит в результате гидродинамической работы, затрачиваемой на перемещение жидкости. В ГДТ механическая энергия ДВС преобразуется в кинетическую энергию жидкости, которая в конечном счёте превращается в тепло в результате трения и гидродинамических потерь.
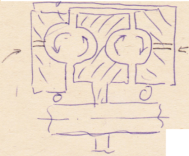
Лопастные ГДТ. Создание гидродинамической работы.
К
внутренней поверхности статора
прикрепляются несколько радиально
расположенных лопастей. Аналогичные
лопасти сделаны и на роторе. Наиболее
технологически простыми являются
плоские лопатки.
 .
.
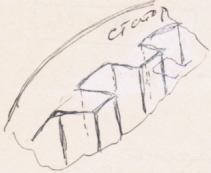
Благодаря этому все лопатки не могут одновременно устанавливаться друг против друга (может только одна пара лопаток). Это обеспечивает уменьшение пульсаций. Такая конструкция позволяет увеличить гидродинамическую работу.
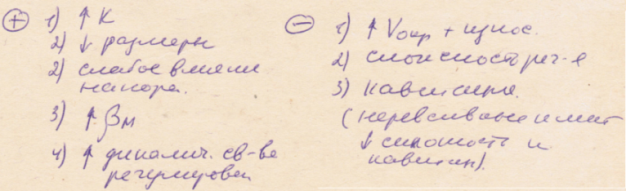
Преимущества: высокий K; небольшие габариты; слабое влияние насоре. Недостатки: низкий βN; высокая склонность к кавитации; низкая α (скоростного диапазона); низкая Vокр.
Момент циркуляции (Мц).
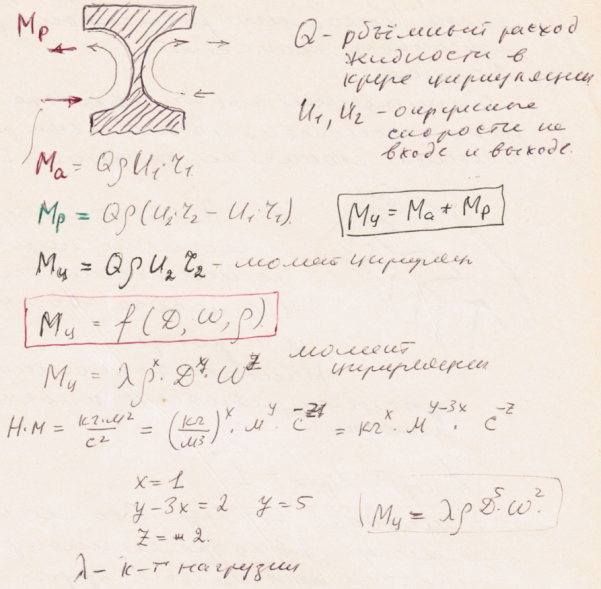
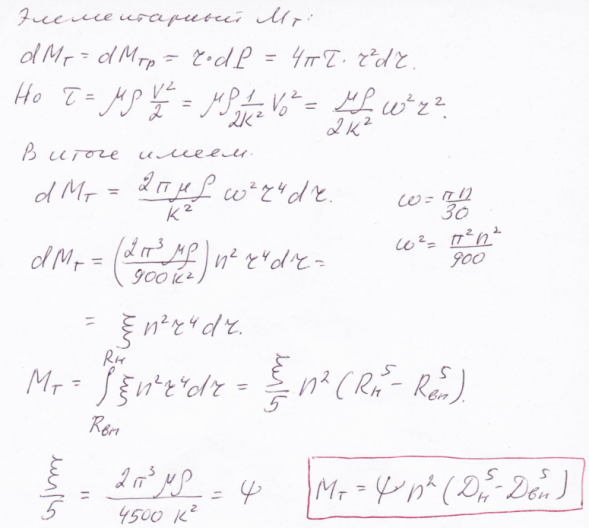
Вывод выражения для МТ исходя из метода размерностей.
Снижение неравномерности тормозного момента в этих ГДТ. Места подвода и отвода рабочей жидкости в камерных ГДТ; преимущества и недостатки. Реверсивные и нереверсивные ГДТ.
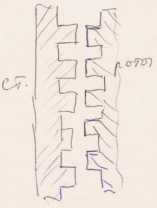
В статоре и роторе выполнены карманы полуэллиптического сечения. Жидкость преобретает энергию в роторе, а отдаёт в статоре. Для уменьшения пульсаций число ячеек в статоре на 1..2 меньше числа ячеек ротора Zст = Zрот – (1…2). Вода подаётся внутрь ячеек , а затем при вращении захватывается ими и подаётся к периферии , далее в неподвижные ячейки. При этом вода непрерывно перерезается кромками лопастей.
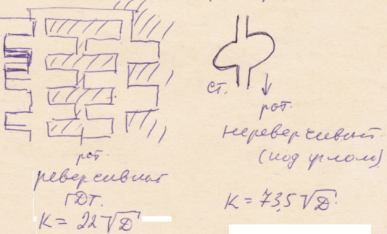
Камерные ГДТ с “разрезным” ротором, их преимущества.

В таких ГДТ периферийная часть ротора «отделена» от его части, связанной со ступицей, и применяется в виде стационарной (неподвижной) направляющей к статору. Это позволяет увеличить частоту вращения n и измеряемую мощность N при достаточно низкой скорости воды.
Ограничение диаметра ротора ГДТ.
Уменьшение диаметра ГДТ приводит к проблеме отвода теплоты. Увеличение диаметра ротора ГДТ приводит к увеличению окружной скорости Vокр и к уменьшению давления, т.е. к увеличению кавитации.
Ограничения энергоёмкости ГДТ (причины).
Задача №2.
2. Измерение крутящего момента (Мк). Динамометрические муфты
Измерение мощности ДВС, как правило, осуществляется косвенно путём раздельного измерения крутящего момента Мк и частоты вращения n.
Тензодинамометры: принцип действия, мера (измеряемая величина, формула), размещение тензорезисторов на валу, схема включения. Влияющие факторы. Какие геометрические размеры мерного участка вала влияют на чувствительность тензодинамометров? Преимущества и недостатки.
В
тензорезистивных динамометрах мерой
Мк
является деформация поверхности УЭ,
вызванная наличием касательных
напряжений τ. С помощью тензорезисторов
(ТР) эта деформация ε преобразуется в
изменение активного сопротивления ТР
R
и далее в электрический сигнал.
Максимальная величина касательных
напряжений τ, возникающих при закручивании
вала, составляет
![]() ,
где W
– момент сопротивления при кручении
вала, м3.
Наибольшая чувствительность достигается
при использовании полного моста, в
котором ТР, образующие противоположные
плечи моста, имеют одинаковые деформации.
Для этого на одной стороне вала под
углом 450
к образующей и 900
друг к другу размещаются ТР. Аналогичным
образом размещаются ТР на другой стороне
мерного участка вала.
,
где W
– момент сопротивления при кручении
вала, м3.
Наибольшая чувствительность достигается
при использовании полного моста, в
котором ТР, образующие противоположные
плечи моста, имеют одинаковые деформации.
Для этого на одной стороне вала под
углом 450
к образующей и 900
друг к другу размещаются ТР. Аналогичным
образом размещаются ТР на другой стороне
мерного участка вала.
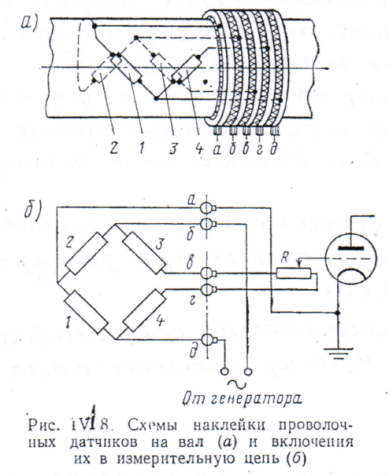
Наибольшая чувствительность достигается при использовании полного моста, в котором ТР, образующие противоположные плечи моста, имеют одинаковые деформации (1 и 4). Для этого на одной стороне вала под углом 450 к образующей и 900 друг другу размещаются ТР. Аналогичным образом размещаются ТР на другой стороне мерного участка вала (2 и 3). Схема полного моста (наиболее часто применяемая в настоящее время) обеспечивает: 1. увеличение чувствительности (в 4 раза по сравнению с полумостом). 2. Уменьшение влияния деформаций изгиба вала. 3. Уменьшение влияния деформаций растяжения – сжатия в осевом направлении. 4. Обеспечивает схемную температурную компенсацию. 5. В значительной мере (например по сравнению с полумостом) уменьшение влияния переходного сопротивления скользящих контактов токосъёмника (в предположении идентичности переходных сопротивлений а,б,в,г).
Индуктивные динамометры: принцип действия, мера (измеряемая величина, формула), размещение индуктивных преобразователей на валу, схема включения. Влияющие факторы. Каким образом и какие геометрические размеры мерного участка вала влияют на чувствительность индуктивных динамометров? Преимущества и недостатки.
Принцип действия основан на изменении индуктивности катушки при введении в неё (или частичного выведения из неё) ферромагнитного сердечника. Вал, через который осуществляется передача Мк, имеет мерных участок уменьшенного диаметра. Крайнее сечение вала образуют базу измерений. С одним концом базы измерения жёстко связаны катушки индуктивности, оси которых перпендикулярны оси вала. Вдоль оси катушек могут перемещаться ферромагнитные сердечники, которые жёстко связаны со вторым концом базы измерения.
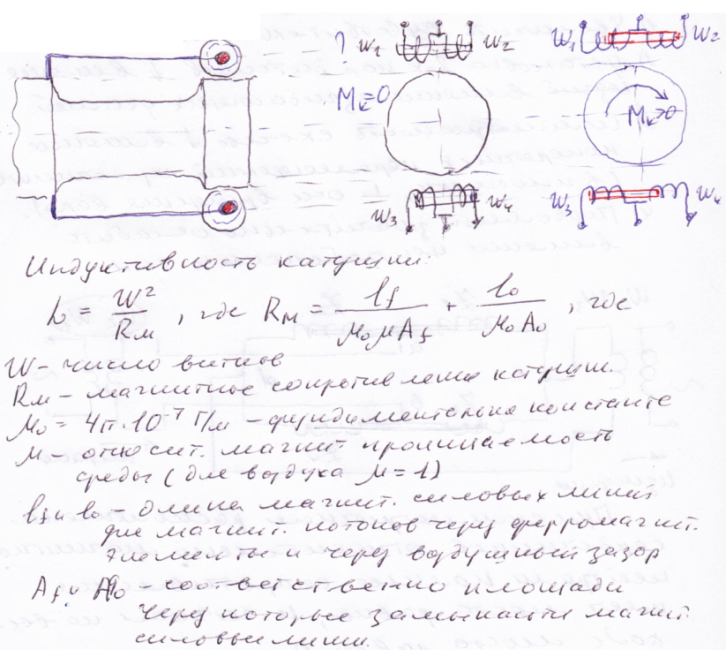
В данном случае, однако, индуктивный датчик является датчиком соленоидного типа. Его индуктивность зависит от соотношения длин катушек. Индуктивные датчики включены по дифференциальной схеме. Сам первичный преобразователь включает в себя две индуктивные катушки, имеющие общую точку. При симметричном расположении сердечника магнитные потоки в обеих катушках одинаковы. Как правило, устанавливаются 2 пары таких катушек, по углом 1800, образуя в конечном счёте полный индуктивный мост. Это позволяет увеличить чувствительность; установка двух пар датчиков уменьшает влияние изгибающих усилий; симметричность схемы уменьшает влияние поперечных перемещений сердечников (в плоскости, перпендикулярно оси вращения); позволяет значительно ослабить влияние центробежных сил.
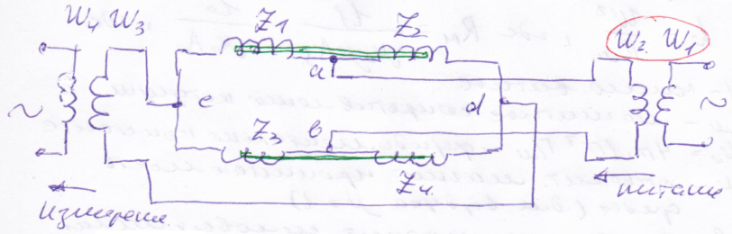
Достоинства индуктивных преобразователей моментов: 1. Низкое выходное сопротивление и, как следствие этого, низкий уровень помех. 2. Высокая чувствительность. 3. Сравнительно высокая мощность выходного сигнала, что позволяет осуществлять передачу с вращающегося вала с помощью вращающихся трансформаторов. 4. Устойчивость к изгибу и поперечным смещениям. 5. Устойчивость к воздействию окружающей среды (загрязнённость, влажность, замасливание). 6. Сравнительная простота измерительной аппаратуры. 7. Фазочувствительность и возможность градуировки при неподвижном вале. 8. Возможность работы в широком диапазоне частот вращения. Недостатки: 1. Наличие вращающихся обмоток и сердечников, что уменьшает надёжность. 2. Влияние температуры.