

3. Индицирование двс. Измерение заряда по величине напряжения
Стекание заряда. Постоянная времени датчика. От чего она зависит и на что влияет?
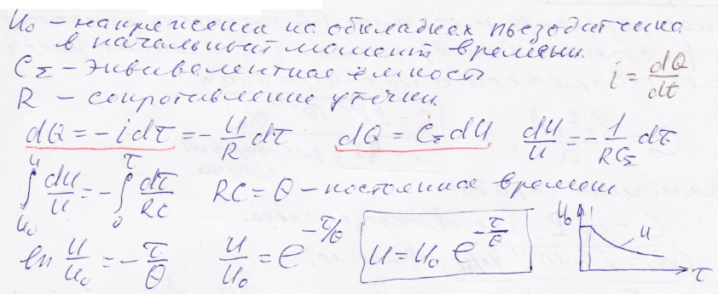
Т.о. пьезокварцевые преобразователи теоретически не могут применяться для измерения давлений, имеющих постоянную составляющую. Непрерывная утечка заряда приведёт к тому, что напряжение на обкладках конденсатора С0 будет определяться только переменной составляющей измеряемого давления. Кроме того, датчик будет плохо регистрировать и низкочастотные составляющие измеряемого давления.
Чем определяется выбор постоянной времени (верхний и нижний пределы)?
Т.о. рабочей областью данного СИ является область, в которой чувствительность остаётся постоянной
Сверху эта область ограничивается частотой собственных колебаний датчика (преобразователя). Снизу эта область ограничивается величиной постоянной времени θ. Чем выше θ, тем медленнее уменьшение напряжения на обкладках преобразователя.
Что даёт увеличение постоянной времени? Как реально можно увеличить постоянную времени? Какими техническими средствами это достигается? Чем ограничивается максимально возможная величина постоянной времени?
Достижение как можно большего значения θ очень важно при измерении медленно меняющихся давлений или при проведении статической градуировки преобразователя. Принципиально увеличить θ можно за счёт увеличения R или увеличения СΣ. Однако, это увеличение за счёт включения параллельно преобразователю конденсаторов приводит к уменьшению выходного напряжения преобразователя. Поэтому для увеличения θ используется увеличения Rвх (сопротивления утечки). Это позволяет расширить частотный диапазон без потери чувствительности. Однако, при очень высоком Rвх (Rутечки) вход пьезоусилителя становится очень чувствительным к помехам. Его работа становится неустойчивой. Считается, что для удовлетворительного наблюдения процесса значение θ должно лежать в пределах 25 ≤ θ/τн ≤ 50, где τн – время «наблюдения». Высокое Rутечки требует столько же высокого сопротивления кабеля.
Требования к соединительному кабелю (3-4).
1. Наличие экрана. 2. Увеличенное сопротивление изоляции между проводом и экраном (не менее собственного сопротивления кварца). 3. Ёмкость кабеля не должно изменяться при сотрясениях, вызванных работой двигателя. 4. На проводе не должно возникать зарядов от трения провода об изоляцию. 5. Основные характеристики кабеля не должны меняться с применением атмосферных условий.
Натекание заряда на датчик: к чему это приводит? Способ устранения натекания заряда на датчик.
В современных системах индицирования удаётся достичь снижения сигнала на входе не более 5 мВ за 30 мс. Это даёт возможность проводить практически статическую градуировку преобразователя. Вместе с тем для исключения натекания заряда на датчик последний необходимо периодически замыкать на массу в момент «нулевого усиления», т.е. в динамическом режиме при переходе через «0» (обнуление заряда). Замыкание происходит с упреждением, а размыкание точно в точке 2.
Задача №19.