

3. Индицирование двс. Основные сведения
Одноцикловые индикаторы – индикаторы переменного действия, преобразуют давление в электрический сигнал, пропорциональный величине давления.
Блок-схема индицирования (для одноцикловых индикаторов): основные элементы и их назначение (общий случай).

Эффективность процесса индицирования определяется 3 составляющими. 1. Датчик, воспринимающий давления и преобразующий его в первичный электрический сигнал. 2. Входной усилитель – преобразователь сигнала с дальнейшим приведением его к уровню входного сигнала АЦП. 3. Система сбора, хранения, обработки и представления информации. ДД – датчик давления. ДОМ – датчик оборотных меток (ВМТ). ДУМ – датчик угловых меток. ДММ – датчик момента искрообразования им ДХФ – датчик хода иглы форсунки. НУ – нормирующий усилитель. ФИ – формирователь импульсов включая множительные и делительные устройства. АИФ – аппаратный интерфейс. АЦП – аналого-цифровой преобразователь. ОЗУ – оперативно-запоминающее устройство. МП – микропроцессор. Д – дисплей. Кл – клавиатура.
Условие соответствия динамических характеристик датчика требованиям динамичности исследуемого процесса.
При индицировании двигателя необходимо, чтобы частотная характеристика датчика могла обеспечить измерения мгновенных значений давлений с заданной погрешностью, не превосходящей некоторого допустимого значения. Теоретически это возможно, если частотный спектр исследуемой закономерности расположен внутри полосы неискажённого пропускания датчика.
В чём заключается получение требований для оценки динамичности исследуемого процесса?
Для определения требований к динамическим свойствам датчика необходимо иметь априорную оценку динамичности исследуемого процесса, т.е. о частотном спектре исследуемого сигнала. Объективный метод оценки требований к частотным характеристикам индикаторов давления основан на использовании результатов гармонического анализа индикаторных диаграмм.
Как соотносятся частотный спектр исследуемой закономерности с частотой собственных колебаний механической системы датчика?
Для
определения требуемой частоты собственных
колебаний самого датчика следует
воспользоваться АЧХ и ФЧХ. Уравнение
движения механической системы с
затуханием колебаний:
 .
k
– круговая частота незатухающих
колебаний, n
– размерный коэффициент затухания, ζ
= n/k
– безразмерный коэффициент затухания.
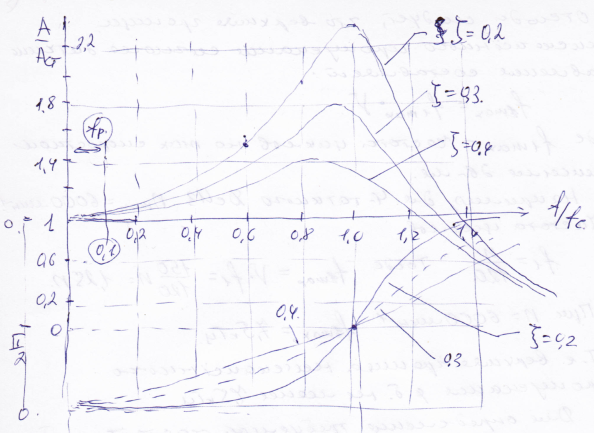
На основании АЧХ и ФЧХ следует, что для
слабо демпфированных систем (ζ = 0,3…0,4)
полоса неискажённого частотного и
фазового пропускания (рабочая полоса
частот) составляет fp
≈ 0,1 fc,
где fc
– частота собственных колебаний
механической системы датчика.
.
k
– круговая частота незатухающих
колебаний, n
– размерный коэффициент затухания, ζ
= n/k
– безразмерный коэффициент затухания.
На основании АЧХ и ФЧХ следует, что для
слабо демпфированных систем (ζ = 0,3…0,4)
полоса неискажённого частотного и
фазового пропускания (рабочая полоса
частот) составляет fp
≈ 0,1 fc,
где fc
– частота собственных колебаний
механической системы датчика.
Т.о. fc ≈ 10fp = 75кГц. Выполнение данного условия гарантирует, что механическая инертность датчика не вызовет значительных динамических погрешностей при определении мгновенных давлений в цилиндре.
От чего (каких конструктивных особенностей) зависит частота собственных колебаний механической системы датчика?
Газодинамическая инерционность вызвана ограниченными возможностями размещения датчика в цилиндре двигателя. Включает в себя 3 составляющие: 1. Наличие объёма полости датчика после соединительного канала под мембраной. 2. Скорость передачи импульса давления через соединительный канал. 3. Гидравлическое сопротивление соединительного канала при передаче сигнала давления из цилиндра в рабочую камеру датчика. В большинстве конструкций давление передаётся на рабочую мембрану датчика через соединительный канал. Последний, будучи заполнен упругим газом, образует совместно с объёмом газа под мембраной колебательную систему. Точность передачи давления будет зависеть от объёма полости датчика Vд и от параметров соединительного канала. Объём рабочей полости датчика и соединительный канал являются факторами, ограничивающими динамические свойства датчика.
Как экспериментально определяется частота собственных колебаний датчиков?
Для определения требуемой частоты собственных колебаний самого датчика следует воспользоваться АЧХ и ФЧХ.
Задача №15.
№ 2