

1. Электрические тормоза на базе машин постоянного тока (мпт)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
Основные элементы МПТ, их назначение.
На неподвижной части МПТ расположены полосы и обмотки возбуждения (ОВ). Обмотки соединены так, чтобы при прохождении по ним тока полосы приобретали чередующуюся полярность. На вращающейся части расположена обмотка, в которой индуцируется ЭДС. Поэтому вращающаяся часть называется якорем. От обмотки якоря идут ответвления к коллектору, который представляет собой цилиндрическое тело, состоящее из изолированных медных пластин. Обмотка имеет большое число секций, каждая из которых ответвляется и следующим друг за другом коллекторным пластинкам.
Электродвижущая сила (ЭДС) обмотки якоря.
При вращении якоря в проводниках его обмотки наводится ЭДС (точнее в проводниках, лежащих на внешней поверхности сердечника) e = B*l*V, [B] Тл (Тесла). В обмотке якоря наводится переменное ЭДС, т.к. каждый проводник проходит полосы разной полярности. Для выпрямления ЭДС используется коллектор, с которым соприкасаются щётки. Последние устанавливаются в тех местах, где ЭДС меняет направление, т.е. в середине межполюсного промежутка.
ЭДС обмотки якоря: 1. E = cE*n*Ф, где сЕ – конструктивная постоянная МПТ. 2. сЕ = Р*W/(60a), где Р – число нар полюсов, W – общее число активных проводников якоря, а – число параллельно работающих витков якоря, Ф – поток полюса якоря. 3. n = E/(cE*Ф).
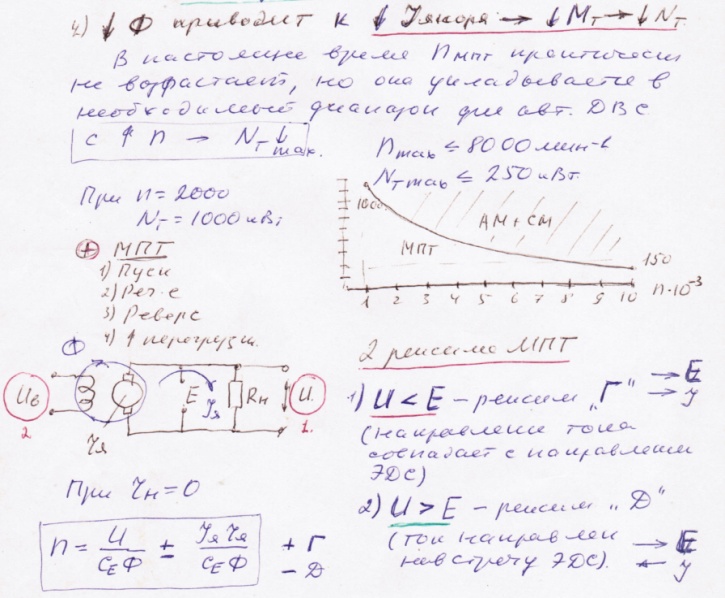
Быстроходность МПТ: влияющие факторы (3) и ограничения (3). Электромагнитный момент МПТ. «Скольжение» МПТ при изменении внешней нагрузки. МПТ в режиме генератора и в режиме двигателя: частота вращения и соотношение ЭДС и напряжения. Механическая характеристика МПТ при работе с внешней активной нагрузкой: возможности регулирования и практическая реализация.
Из выражения для Е следует: 1. для увеличения быстроходности машины, надо увеличить Е (увеличить разность напряжений между коллектором и щётками) (Е = 500В – граница… увеличение Е до 800В). 2. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения Р, но увеличивается нагрузка на каждую щётку. 3. увеличение быстроходности за счёт уменьшения сЕ за счёт уменьшения U (число витков), но увеличиваются коммутационные явления между ламелями коллекторов.
Недостатки (3) и область возможного применения.
Выводы: 1. Необратимые потери энергии, её преобразование в тепло и рассеивание её в окружающую среду. 2. Более низкая, как правило, устойчивость режима по сравнению с ГДТ.
3. Неудобства при снятии НХ ДВС: любое изменение нагрузки приводит к значительным изменениям скоростного режима системы МПТ-ДВС. Это изменение тем больше, чем выше n, что требует перенастройки тормоза.
Область применения: 1. обкатка ДВС после ремонта; 2. приёмо-сдаточные испытания.
Задача № 6
2. Измерение расхода топлива
Тахометрические расходомеры и расходомеры с вращающимся шариком: основные элементы, принцип действия, мера расхода, метрологические свойства (основные достоинства (4-5)) и недостатки (2). Расходомеры с овальными шестернями (роторами): основные элементы, принцип действия, мера расхода, метрологические свойства, основной недостаток, способ повышения разрешающей способности и способ компенсации основного недостатка. Задача №11.
3. Индицирование ДВС. Градуировка пьезоэлектрических индикаторов
Цель получение зависимости выходного сигнала от давления, приложенного к датчику.
В каких случаях возможна статическая градуировка пьезодатчиков?
Для получения фиксированных значений давления используются грузопоршневые манометры (ГПМ) и масленые прессы (МП). Основные требования к ГПМ: 1. Возможность создания давлений до 50 МПа. 2. Высокая точность измерения (γ = ± 0,02…0,05). 3. Точность воспроизведения заданных усилий. Возможность реализации статической градуировки определяется постоянной времени θ СИ давления. Её значения должны быть в пределах 25 ≤ θ/tн ≤ 50, где tн – время наблюдения. Но за время градуировки возможно стекание заряда . 1. Определить пределы θ для n = 1200 и 6000 мин-1. 2. Если θ = 0,5с, то на сколько % произойдёт утечка при n = 1200 мин-1. 3. Если время градуировки τгр = 300с, то при каком значении θ погрешность δ ≤ 0,2%. При проведении измерений необходимо тщательно удалять воздух из рабочих полостей.
В чём её недостатки?
Статическая градуировка вне двигателя имеет существенный недостаток, связанный с тем, что ИПД находится в условиях, резко отличающихся от рабочих (например по температуре). Эта погрешность в общем случае не поддаётся точной оценке и может быть довольно значительной.
Каким образом осуществляется градуировка датчика непосредственно на двигателе? Какой датчик используется для этой цели?
В основу способа градуировки на двигателе положен метод сравнения сигнала ИПД с сигналом образцового датчика. В качестве последнего используется клапанный датчик пневмоэлектрического индикатора давления с индукционным вторичным преобразователем. По начальным фазам движения такого датчика, точка равенства давлений (в полости датчика образованного и в полости КС) может быть зарегистрирована с высокой точностью.
Способы нанесения нулевой линии индикаторной диаграммы (2).
Задавая различную величину контролируемого давления, можно получить совокупность таких ординат и определить масштаб давления. Однако, необходимо знать его абсолютную величину, для чего надо определить начало отсчёта (нулевую линию) или линию атмосферного давления. Возможны два варианта: 1. Ориентируются на линию выпуска или впуска. В полость пневмоэлектрического датчика подавалось рконтр, примерно равное давлению перед открытием выпускного клапана, т.е. рконтр = рв’ этот момент принимается за контролирующую точку. От точки ИД, соответствующий данному моменту, в масштабе давлений, откладывается отрезок, равный рконтр в полости пневмоэлектрического датчика. Линия, проведённая через нижнюю точку считалась искомой атмосферной линией, которая принималась за начало отсчёта при обработке ИД.
2. С помощью быстродействующего стробоскопического клапана проводился отбор газа на выпуске, с последующим измерением давления отобранного газа образованным манометром.
В каких случаях необходима динамическая градуировка пьезодатчиков?
1. Определение характеристик датчика при наличии низкой постоянной времени θ, т.е. при наличие утечек; 2. Определение погрешности, вызванной утечкой заряда.
Как она проводится? Что ещё определяется по этой градуировке?
Для этой цели используется пневмогидравлическое устройство, воспроизводящее П-образные импульсы давления, воздействующие на ИПД. Оно включает в себя.
Как определяется собственная частота индикаторов?
Цель – определение динамических свойств датчиков давления с целью дальнейшей оценки динамической погрешности СИ. Метод – использования П-образных импульсов давления, создаваемых специальной установкой для создания импульсных давлений (импульсные установки типа газодинамической ударной трубы).
№ 18