

1. Индукторные тормоза (ит).
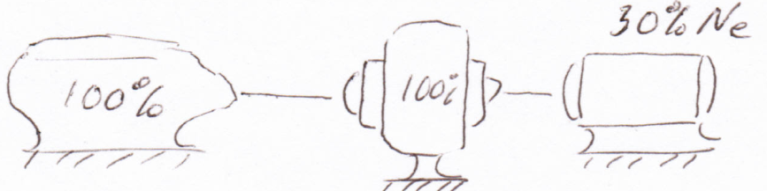
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электромагнитную энергию. Индукторные тормоза относятся к тормозам с рассеиванием энергии. Они не обеспечивают рекуперацию энергии, поглощаемой при торможении ДВС, и не обладают обратимостью.
Основные элементы ИТ, их назначение и материалы.
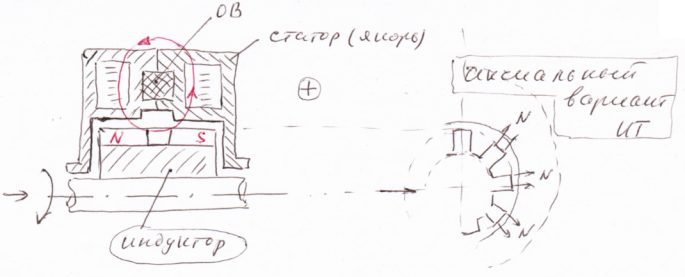
ИТ состоит из двух основных элементов: 1. неподвижной части – статора или якоря, в котором размещается обмотка возбуждения (ОВ); по последней пропускается постоянный ток. 2. вращающейся части – ротора или индуктора. Индуктор представляет собой цилиндр с крупными прямоугольными зубьями, он изготовлен из стали с высокой магнитной проницаемостью. Статор, как правило, состоит из двух симметричных частей, между которыми заключена ОВ. Статор стараются изготовлять из стали с высокой электропроводимостью.
Принцип действия ИТ.
Принцип действия ИТ основан на использовании вихревых токов, возникающих в металле при использовании в нём магнитного поля.
Преобразование энергии в ИТ.
В ИТ происходит двойное преобразование энергии: 1. подводимая к ротору механическая энергия сначала превращается в энергию электромагнитного поля (фактически в электрическую энергию). 2. затем последняя превращается в тепловую. Поэтому в большинстве случаев ИТ имеют жидкостное охлаждение. Только ИТ небольшой мощности и ИТ, работающие в течении короткого отрезка времени, (импульсном режиме) могут иметь воздушное охлаждение.
Типы ИТ по способу охлаждения. Расчёт воды, необходимой для охлаждения ИТ.
По способу охлаждения ИТ разделяют на две группы: 1. с «мокрым ротором», когда вода (обычно под напором водопроводной магистрали) поступает непосредственно в пространство между ротором и статором, охлаждая их. 2. с «сухим ротором», в которых вода циркулирует только в статоре. Это существенно уменьшает «холостые потери» в ИТ (момент при отсутствии тока возбуждения), расширяя тем самым область управления ИТ.
Количество воды, необходимое для охлаждения ИТ, определяется также, как и в ГДТ, с той лишь разницей, что в ИТ допускается большая температура воды на выходе, чем в ГДТ, т.к. возникновение кавитации маловероятно. Для расчёта используется уравнение теплового баланса Ne = Qт, определить расход (объёмный) рабочей жидкости на единицу мощности, т.е. V/Ne, если известны теплоёмкость рабочей жидкости (вода и тосол), плотность, и Δt – перепад температур на входе и выходе.
Тормозной момент ИТ: факторы, влияющие на него.
Момент
Мт,
развиваемый (поглощаемый) ИТ, зависит
от целого ряда конструктивных параметров
и от управляющих факторов: 1. от активного
диаметра D
и активной длины ротора l;
2. от переменной составляющей магнитной
индукции В; 3. от частоты вращения n;
4. от числа зубьев ротора р; 5. от магнитной
проницаемости μ и удельной
электропроводимости ρ.
 .
.
Радиальная и аксиальная компоновки ИТ.
Стремление увеличить Мт при уменьшении габаритов ИТ привело в последнее время к замене традиционной аксиальной конструкции ИТ радиальной. К недостаткам аксиального ротора относятся: трудность обеспечения радиального зазора; возможная вибрация ротора.
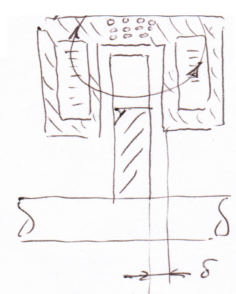
В радиальных ИТ магнитный поток замыкается через торцевые внутренние поверхности якоря (статора) и торцевые поверхности зубьев. Фактором, определяющим пульсацию магнитного потока, является осевой зазор, который может быть выполнен значительно меньшим, чем радиальный. Кроме того, осевой зазор не меняется при вибрациях ротора (в отличие от радиального). В итоге такая конструкция обладает значительно большей энергоёмкостью, чем ИТ с аксиальным ротором.
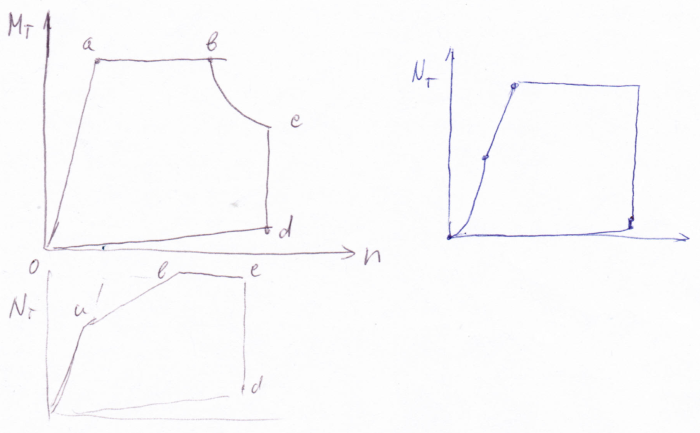
Механическая характеристика ИТ (объясните её закономерность).
ЭМХ ИТ – зависимость Мт от частоты вращения при Jв = const. ВСХ ИТ – определяет диапазон возможных режимов работы ИТ.
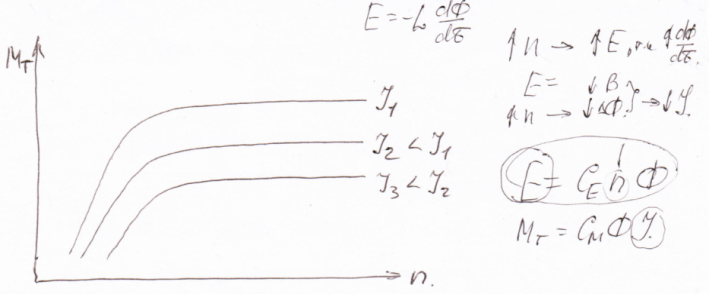
Мт ~ Jв, но с увеличением Jв темп увеличения Мт снижается. С увеличением n увеличивается частота изменения магнитного потока, что увеличивает Мт. Но при высоких n: увеличивается реакция якоря; уменьшается амплитуда переменной составляющей потока. Поэтому зависимость Мт(n) принимает вид горизонтальной прямой.
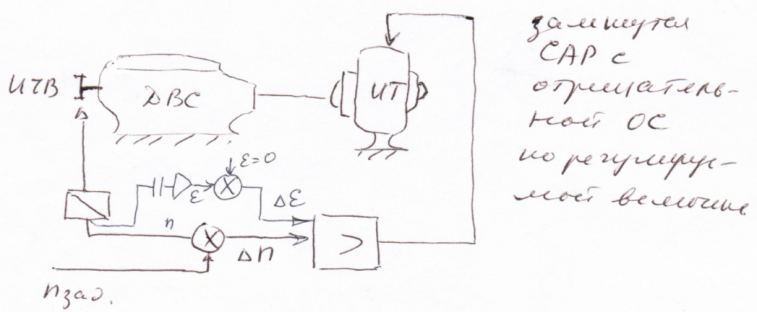
Её соответствие характеристике ДВС.
С точки зрения сопряжения с ДВС естественная ЭМХ ИТ неблагоприятна. Во всех случаях требуется автоматическое управление ИТ, что не сложно осуществить, учитывая небольшую мощность управления. С другой стороны, способность поглощать высокий крутящий момент при низких частотах вращения позволяет в принципе значительно расширить диапазон регулирования ИТ. Регулирование ИТ осуществляется только одним путём – изменением тока возбуждения. Мощность возбуждения составляет 0,1…0,3% от поглощаемой мощности.
Внешняя характеристика ИТ с учётом ограничений.
ВСХ ИТ показывает поле возможных режимов работы ИТ.
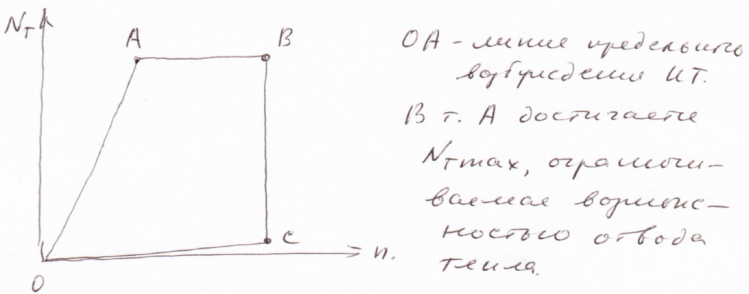
Линия ВС – ограничивает максимальною частоту вращения по величине сил инерции. Линия ОС – «холостые» потери в ИТ (без возбуждения).
Преимущества и недостатки ИТ в качестве тормоза. Способы преодоления основных недостатков ИТ.
Преимущества: 1. Способность поглощать высокий Мт при низких и высоких частотах вращения предопределяют широкий диапазон регулирования ИТ. 2. Обладает высокой энергоёмкостью. 3. Более низкая стоимость изготовления и эксплуатации. 4. Более высокая надёжность, т.к. отсутствуют обмотки в роторе. Более высокая частота вращения, чем в ЭМ. 5. Простота управления ИТ и простота его автоматизации. 6. Малая механическая инерционность. 7. Малое рабочее напряжение ИТ. Недостатки: 1. Отсутствие режима прокрутки ДВС. Эта задача решается сочетанием ИТ с малой МПТ.
2. Неблагоприятная форма ЭМХ, что требует в общем случае САУ стабилизационного режима.
3. Отсутствие рекуперации энергии. Этот недостаток пока не устранён. 4. Высокие требования к качеству воды и её очистке. 5. Необходимость обязательной установки системы аварийной автоматизации от перегрева, а также защита ИТ от высокой частоты вращения.
Область применения.
ИТ имеют в настоящее время очень широкий диапазон применения от исследовательских испытаний до доводочных и отладочных. Использование их при приёмо-сдаточных испытаниях нежелательно из-за отсутствия режима «холодной» обкатки и рекуперации энергии. ИТ очень удобны для автоматизации испытаний и для создания специальных САУ, предназначенных для испытаний ДВС на НУР.
2. Измерение частоты вращения. Интегрирующий тахометр с аналоговым выходом
Принцип измерения.
Интегрирующие тахометры (частотомеры) по своему принципу относятся к счётчикам импульсов. В них отсутствует преобразование сигнала в аналоговую форму. Такие тахометры являются бесконтактными. Частотный сигнал не подвержен влиянию внешних помех. Простота преобразования сигнала, либо в аналоговую форму, либо в цифровую форму. Относятся к числу косвенных измерений.
Чем создаётся частотная модуляция? Типы бесконтактных преобразователей; объясните принципы их действия. Принципиальные преимущества такого способа измерения. Приведите измерительную схему тахометра с аналоговым выходом. Перечислите основные элементы измерительной схемы. Укажите их назначение. Докажите, что среднее значение выходного аналогового сигнала прямо пропорционально частоте вращения. Какие динамические погрешности возникают в таком типе тахометров? Как их определить, учесть или рассчитать?
Задача №8.