

1. Электрические тормоза на базе машин постоянного тока (мпт)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
Система “генератор-двигатель” (система Г-Д). Принципиальная схема, основные элементы.
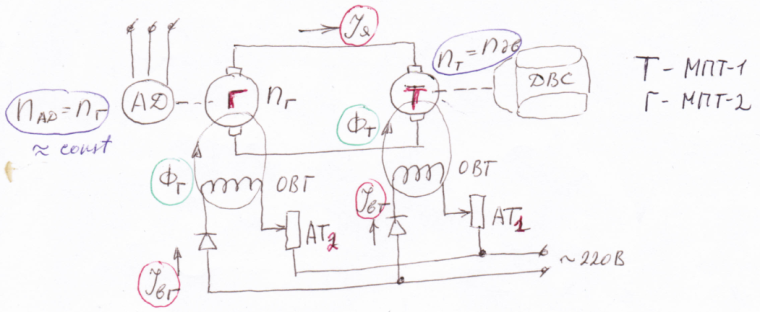
Эта схема включает 2 МПТ с независимым возбуждением. Одна из них (МПТ-1) жестко связана с КВ ДВС и условно названа тормозом Т. Тормоз электрически связан с машинным преобразователем энергии (умформер). Последняя состоит из МПТ-2, которая условно названа генератором Г, и асинхронного двигателя (АД), валы которых соединены друг с другом муфтой. Умформер (генератор, соединенный с АД) обеспечивает преобразование 3х фазного тока в постоянный и наоборот. Автотрансформаторы АТ-1 и АТ-2 предназначены для регулирования тока возбуждения в обмотках возбуждения генератора и тормоза (ОВГ и ОВТ). Практически это осуществляется одной рукояткой, связанной с АТ-1 и АТ-2 ОВГ и ОВТ, но последовательность управления этими АТ небезразлична.
Уравнение механической характеристики МПТ в составе системы Г-Д (вывод формулы). Анализ механических характеристик МПТ в составе системы Г-Д.
МПТ-1 работает в работает в режиме генератора (Uт < Eт), а МПТ-2 в режиме электродвигателя (Uг > Eг). Напряжение на зажимах тормоза и генератора в этом случае определяются:

Сет и Сег – электромеханические постоянные тормоза и генератора. nт (nдвс) и nг (nам) – частота вращения тормоза и генератора. Фт и Фг – магнитные потоки, возбуждаемые в ОВТ и ОВГ. Jя – ток якоря в цепи Г-Д. rят и rяг – внутренние сопротивления якоря тормоза и генератора. Используя очевидное равенство:
![]()
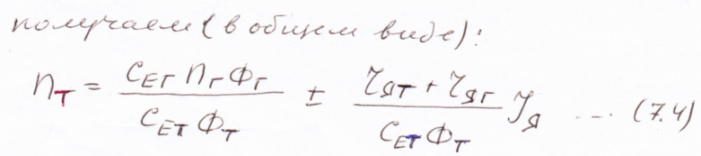
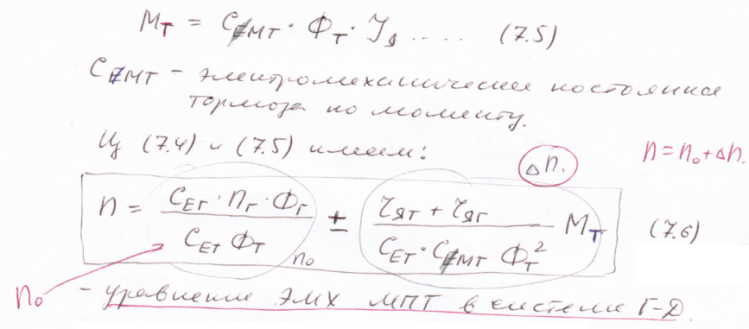
Знак + относится к случаю торможения ДВС (к работе тормоза в режиме генератора), а знак – к режиму работы тормоза в качестве электродвигателя. Ток в цепи якоря связан с величиной поглощаемого момента Мт
Причины отклонения действительных механических характеристик МПТ в составе системы Г-Д от расчётных.
Реальные МХ МПТ отличаются от расчётных и в общем случае являются нелинейными. На режиме ХХ ток в обмотке якоря практически отсутствует. Магнитный поток создаётся током, проходящим по ОВ. Магнитное поле симметрично относительно полюсов. Под нагрузкой по обмотке цепи якоря потечёт ток, который создаёт в магнитной системе МДС якоря. Воздействие поля якоря на поле возбуждения называется реакцией якоря. Если МПТ работает в режиме «Г» (при вращении по часовой стрелке), то в результате реакции якоря результирующее магнитное поле будет ослаблено под «набегающим» полюсом и усилено над «сбегающим».
Запуск ДВС с помощью МПТ в данной системе.
При запуске с помощью МПТ необходимо: создать max крутящий момент на тормозе, для чего необходимо создать максимальное возбуждение на ОВТ (Фт – max); обеспечить плавное трогание ДВС с места (плавное нарастание тока якоря), для чего следует создать минимальное напряжение на ОВГ. Т.о. проворачивание ДВС при запуске осуществляется увеличением напряжения на ОВГ и, следовательно, увеличением тока якоря и Мт.
Переход с одного скоростного режима на другой при снятии внешней скоростной характеристики ДВС.
Переход тормоза с режима проворачивания ДВС на режим его торможения (нагружения) происходит автоматически: достаточно включить подачу топлива (в дизелях) или зажигания (в ДсИЗ). Тогда тормоз (Т) переходит из двигательного режима в генераторный, а генератор (Г), наоборот, переходит в режим электродвигателя, вращая вал АМ.
Преимущества и недостатки МПТ в качестве нагружающих устройств ДВС.
Преимущества: 1. Возможность рекуперации энергии. 2. Возможность проворачивания ДВС. 3. Широкий диапазон регулирования по нагрузке. 4. Устойчивость и стабильность процесса управления МПТ. 5. Плавное и бесступенчатое регулирование. 6. Высокая «жёсткость» ЭМХ в режиме Г-Д, что позволяет снижать НХ ДВС практически не трогая органы управления тормозом. 7. Относительно небольшая мощность управления. 8.
Недостатки: 1. Высокая стоимость производства и эксплуатации (особенно системы Г-Д). 2. Ограниченный скоростной режим (n ≤ 8000 мин-1). 3. Резкое снижение максимальной мощности с увеличением скоростного режима. 4. Электромагнитная инерционность МПТ и практическая невозможность форсирования переходных процессов превышением номинального напряжения. Это ограничивает возможности использования МПТ в составе быстроходных САУ.