

2. Измерение частоты вращения. Цифровые измерительные системы 1-го рода
В основе работы ЦИС-1 лежит подсчёт числа угловых меток в течении заданного временного интервала tu. Последний задаётся с использованием ДЧ путём данного кратного деления частоты опорного генератора.
Суммарная погрешность ЦИС-1 при измерении мгновенной угловой скорости (при разгоне). Выражение для суммарной относительной погрешности измерения мгновенной угловой скорости (), считая, что из погрешности средней скорости учитывается только погрешность квантования.
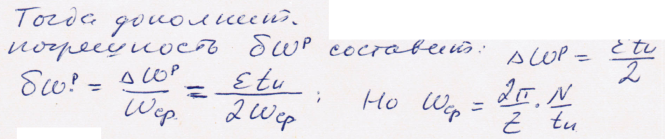
Изменение ω, вызванное например разгоном (наличием углового ускорения ε = dω/dt), приводит к тому, что за время измерительного интервала tu происходит изменение угловой скорости, т.о., значение ω, выданное в конце интервала tu, не соответствует действительному значению ω в момент отсчёта. За время tu значение ω измениться на величину ω2 – ω1 = Δω = εtu среднее значение за интервал tu. Вполне логично данное значение должно быть соотнесено с серединой измерительного интревала.

Будем считать, что разгон происходит на низких скоростных режимах, где доминируют погрешности δN и δφ.
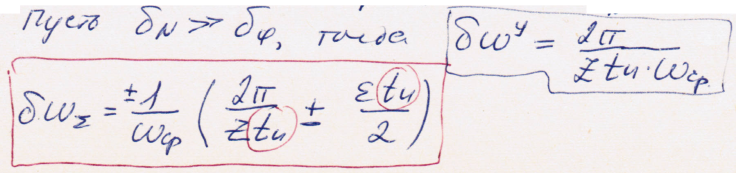
Измерительный интервал по разному влияет на δωу и δωр. Погрешность квантования δN увеличивается с уменьшением ωср. Поэтому для её уменьшения при низких n необходимо увеличить tu. Динамическая погрешность δωр также увеличивается с уменьшением ωср, но для её уменьшения при низких n необходимо уменьшить tu. В случае если погрешность δN и δφ являются соизмеримыми, то:
![]() .
.
Задача №9.
3. Индицирование двс. Регистрация сигналов давления
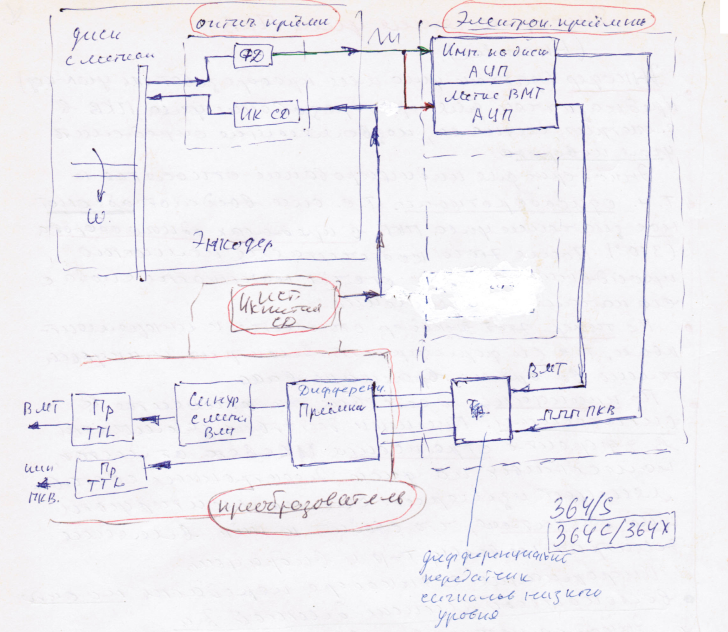
Техническая реализация дискретизации угла поворота коленчатого вала (на примере фотоэлектрического преобразователя фирмы Цейс или преобразователя типа ВЕ). Элементы схемы, их назначение, способ регистрации, диаграмма работы, принцип уменьшения шага дискретизации. Выбор угла дискретизации. Чем определяется выбор частоты дискретизации или угла дискретизации? Время регистрации и его связь с частотой дискретизации. Задача № 21.
В автоматическом режиме. 1. Собственно регистрация мгновенных значений давления в цилиндре в зависимости от угла ПКВ. 2. Алгоритм обработки индикаторных диаграмм с целью получения рi или характеристик тепловыделения. 3. Коррекция возможных динамических погрешностей. 4. Возможность визуального отображения в режиме текущего времени. 5. Организации сбора и хранения информации.
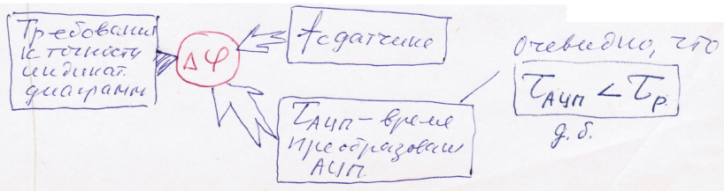
Выбор угла дискретизации (Δφ) определяется требованиями к точности обработки индикаторной диаграммы.
Частота дискретизации fg, численно равная частоте опроса АЦП, определяется: 1. частота вращения КВ, n. Заданным углом дискретизации, Δφ.

Время регистрации τp – величина, обратная частоте дискретизации, т.е. . Очевидно, что при n = 1000 мин-1 τр = 166,2 мкс.
Подобная частота регистрации достаточна для приемлемой точности определения рi, но недостаточна для определения текущих значений р и Т (необходимых, в частности, расчёта NOx). Поэтому необходима более высокая степень дискретизации, в частности, через 0,1оПКВ. В целом выбор Δφ определяется с учётом:
№ 9