3. Индицирование двс. Измерение заряда по величине напряжения
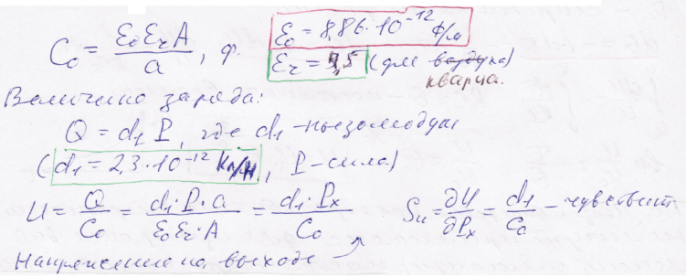
Ёмкость датчика. Вычисление величины заряда и вычисление величины напряжения. Чувствительность датчика по напряжению.
Выходным параметром пьезопреобразователя является напряжение U. Это связано с тем, что пластина кристалла представляет собой конденсатор с 2мя металлическими обкладками. Зная размеры пластин (А – площадь обкладок) и расстояние между ними (а) можно рассчитать напряжение на обкладках.
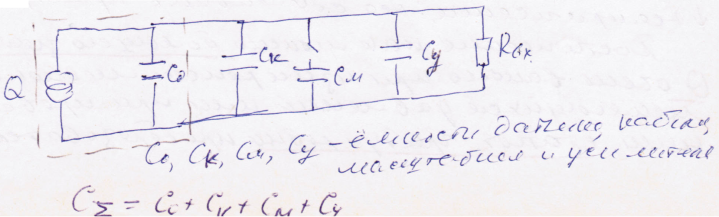
Соединительный кабель и его влияние на величину выходного напряжения.
В реальных условиях включение пьезопреобразователя в схему сопровождается подключенным параллельно ему (т.е. ёмкость С0) других емкостей (соединительный кабель Ск, усилитель Су и См)

Требования к соединительному кабелю (3-4).
1. Наличие экрана. 2. Увеличенное сопротивление между проводом и экраном (не менее собственного сопротивления кварца). 3. Ёмкость кабеля не должно изменяться при сотрясениях, вызванных работой двигателя. 4. На проводе не должно возникать зарядов от трения провода об изоляцию. 5. Основные характеристики кабеля не должны меняться с применением атмосферных условий.
Измерительная цепь включения пьезодатчика. Её влияние на величину выходного сигнала. Задача №18.
№ 8
1. Электрические тормоза на базе машин постоянного тока (МПТ)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую.
Система “генератор-двигатель” (система Г-Д). Принципиальная схема, основные элементы.
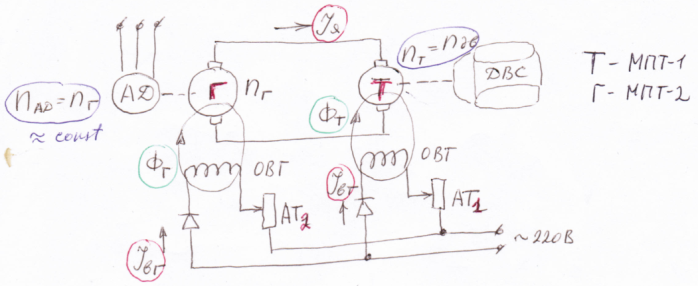
Эта схема включает 2 МПТ с независимым возбуждением. Одна из них (МПТ-1) жестко связана с КВ ДВС и условно названа тормозом Т. Тормоз электрически связан с машинным преобразователем энергии (умформер). Последняя состоит из МПТ-2, которая условно названа генератором Г, и асинхронного двигателя (АД), валы которых соединены друг с другом муфтой. Умформер (генератор, соединенный с АД) обеспечивает преобразование 3х фазного тока в постоянный и наоборот. Автотрансформаторы АТ-1 и АТ-2 предназначены для регулирования тока возбуждения в обмотках возбуждения генератора и тормоза (ОВГ и ОВТ). Практически это осуществляется одной рукояткой, связанной с АТ-1 и АТ-2 ОВГ и ОВТ, но последовательность управления этими АТ небезразлична.
Чем обеспечивается высокая жёсткость механической характеристики МПТ в системе Г-Д?
Применение
более мощных МПТ, которые при поглощении
меньшей мощности имеют меньшее
скольжение. Однако также МПТ имеют
меньшую быстроходность, из-за увеличенной
массы. Причём уменьшение
 приводит к уменьшению
приводит к уменьшению
 относительно сопротивления якоря.
Применение САР с ООС по частоте вращения.
относительно сопротивления якоря.
Применение САР с ООС по частоте вращения.
Как происходит рекуперация энергии? КПД рекуперации?
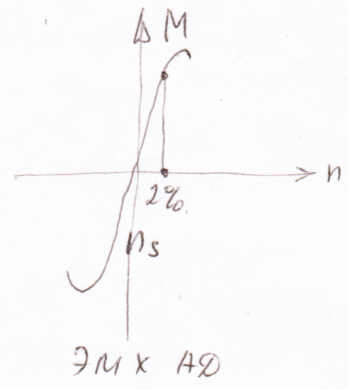
На стадии, когда частота вращения вала АД совпадает с его синхронной частотой вращения переменного магнитного поля 3х фазного АД, момент на его валу становится равным 0. Ввиду жёсткой характеристики Ад для увеличения его частоты вращения требуется резко увеличить М, что обусловливает малое изменение n АД при резком возрастании энергии, отдаваемой в сеть переменного тока. Для этого надо увеличить Мг (момент генератора), который зависит от силы тока якоря и возбуждения статора. Но ток якоря возрастает автоматически при повышении мощности испытуемого ДВС. КПД МПТ < КПД АД (η = 85…90%). Для 2х МПТ η ≤ 0,75. Т.е. 75% мощности испытуемого ДВС отдаётся в сеть.
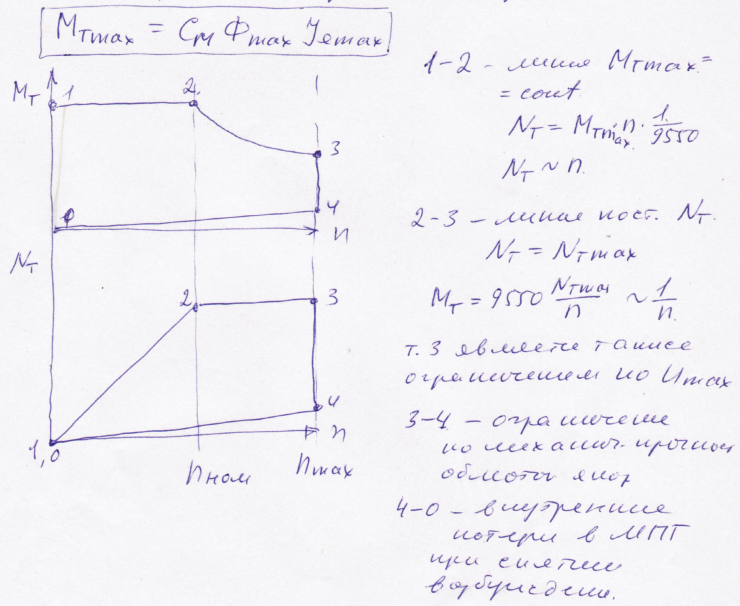
Зоны регулирования МПТ в системе Г-Д.
МПТ может регулироваться двумя путями: 1. Изменением внешней нагрузки при максимальном возбуждении Ф = Фmax, что соответствует Мт max. Такая работа МПТ возможна до Nт = Nт max (естественная зона). 2. Регулирование возможно только при сохранении Nт max = const, что возможно с уменьшением Мт за счёт уменьшения Ф (искусственная зона)
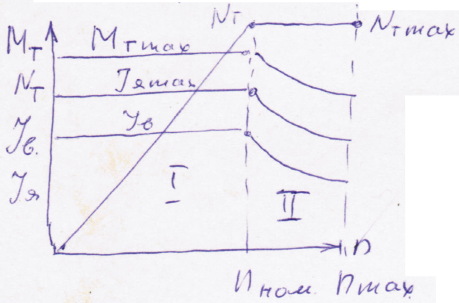
Зависимость скольжения МПТ от скоростного режима в 1-й и во 2-й зонах регулирования. Зависимости тока генератора, напряжения якоря МПТ и тока возбуждения тормоза от частоты вращения в различных зонах регулирования по внешней скоростной характеристике (ВСХ) МПТ.
ВСХ МПТ – зависимость Мт и Nт от n с учётом ограничений. 1. По max Jя (Jя ≤ Jя max), который зависит от сечения проводов и их нагрева. 2. По max Nэл ≤ Nт max, допускаемой по условиям нагрева МПТ (Nт ≤ Nт max). 3. По max U (U ≤ Umax), зависящему от электрической прочности изоляции.