

6. Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США известно много различных патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы использовались в системах наведения стратегических ракет большой дальности во время холодной войны, информация об исследованиях, проводимых в этой области, классифицировалась как секретная. Перспективным является направление развития квантовых гироскопов. [3]
6.1 Квантовый гироскоп
Квантовый гироскоп, прибор, позволяющий обнаруживать вращение тела и определять его угловую скорость, основанный на гироскопических свойствах электронов, атомных ядер или фотонов.
Первое свойство уравновешенного гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление.
Второе свойство гироскопа обнаруживается, когда на его ось начинают действовать сила или пара сил, стремящиеся привести ось в движение конец оси гироскопа будет отклонять не в сторону действия силы, как это при не вращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой начнёт вращаться вокруг оси, это вращение называется прецессией.
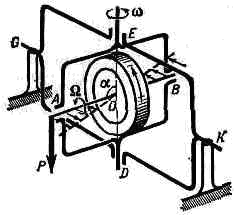
Рис 6.1 Квантовый гироскоп.
Величина угловой скорости прецессии определяется по формуле:
 (1)
(1)
 (2)
(2)
где М –
момент силы Р центра О,  –
угловая скорость собственного вращения
гироскопа вокруг оси АВ, I –
момент инерции гироскопа относительно
той же оси, h =
АО – расстояние от точки приложения
силы до центра подвеса гироскопа; второе
равенство имеет место, когда
сила Р параллельна
оси. Из формулы (1, 2) непосредственно
видно, что прецессия происходит тем
медленнее, чем больше Ω,
точнее, чем больше величина H
= IΩ,
называется кинетическим моментом
гироскопа.
[7]
–
угловая скорость собственного вращения
гироскопа вокруг оси АВ, I –
момент инерции гироскопа относительно
той же оси, h =
АО – расстояние от точки приложения
силы до центра подвеса гироскопа; второе
равенство имеет место, когда
сила Р параллельна
оси. Из формулы (1, 2) непосредственно
видно, что прецессия происходит тем
медленнее, чем больше Ω,
точнее, чем больше величина H
= IΩ,
называется кинетическим моментом
гироскопа.
[7]
6.2 Современные разработки микромеханических гироскопов
В настоящее время разработки ММГ ведут ряд ведущих зарубежных фирм. В США это корпорации Boeing North American, Rockwell International Corporation, Northrop Grumman Corporation, Litton Systems, Motorola, Analog Devices; университетские лаборатории: CalTech, University of California. На создании навигационных систем на основе микромеханических элементов и приборов специализируются Integrated Micro Instruments и Charles Stark
Draper Laboratory. Их продукция используется фирмой Murata Manufacturing, специализирующейся на создании микромеханических навигационных систем. В Великобритании ведущей корпорацией в этом направлении является British Aerospace, в Южной Корее — корпорация Samsung, в Германии — корпорации Robert Bosch и Siemens, во Франции — корпорация SAGEM. [4]