

4.1.2 Ммг с распределенной инерциальной массой.
Один из вариантов конструкции ММГ с распределенной инерционной массой создан в Лаборатории микросистем Калифорнийского университета в Ирвине (UC1 MicroSystems Laboratory) [1]. Конструкция представляет собой несколько симметрично расположенных относительно центра резонаторов, радиально колеблющихся с одинаковой фазой и - частотой. Вращение вокруг вертикальной оси гироскопа приводит к появлению силы Кориолиса, направленной по касательной. Эта сила вызовет крутильные колеба¬ния, регистрируемые емкостными ДП.
Рассмотрение различных вариантов конструкций микромеханических инерниальных датчиков позволило выявить их принципиальные недостатки.
Во-первых, чрезмерное увлечение минимизацией габаритов приборов привело к существенной потере их чувствительности к входному воздействию, увеличению влияния помех разного рода и, соответственно, сниже¬нию точности измерения.
Во-вторых, использование емкостных силовых преобразователей, имеющих исключительно малые силовые характеристики, приводит к необходимости использования резонансных режимов работы приборов, атакже требует уменьшения массы чувствительных элементов. Более того, для обеспечения высокой добротности ко¬лебательной системы прибора необходимо осуществлять вакуумирование и герметизацию внутреннего объема датчика, что само по себе является достаточно сложной технологической операцией. [2]
4.1.3 Микрогироскопы ll-типа
Конструктивным узлом, определяющим функциональные возможности МГ, является ЧЭ. ЧЭ МГ можно называть ИМ (или массы) в подвесе с приводом, который обеспечивает ИМ РД, на который при наличии переносной угловой скорости вследствие возникающего ускорения Ко-риолиса и соответствующих ему сил инерции, генерируются вторичные колебания (ВК). На этом основании МГ иногда называют приборами для измерения ускорения Кориолиса.
Ускорение Кориолиса определяется векторным произведением ак = 2(Пху) (П - вектор мгновенной угловой скорости вращения подвижной системы координат; v - вектор мгновенной линейной скорости тела в подвижной системе координат). Ускорение Кориолиса является вектором, длина которого равна ак = 2Q.v sinф (ср - угол между векторами П и v) и который направлен перпендикулярно к векторам П и v в такую сторону, чтобы кратчайший поворот от П к v казался наблюдателю, смотрящему с конца вектора ак, идущим против часовой стрелки. [1]
4.1.4 Микрогироскопы lr-типа
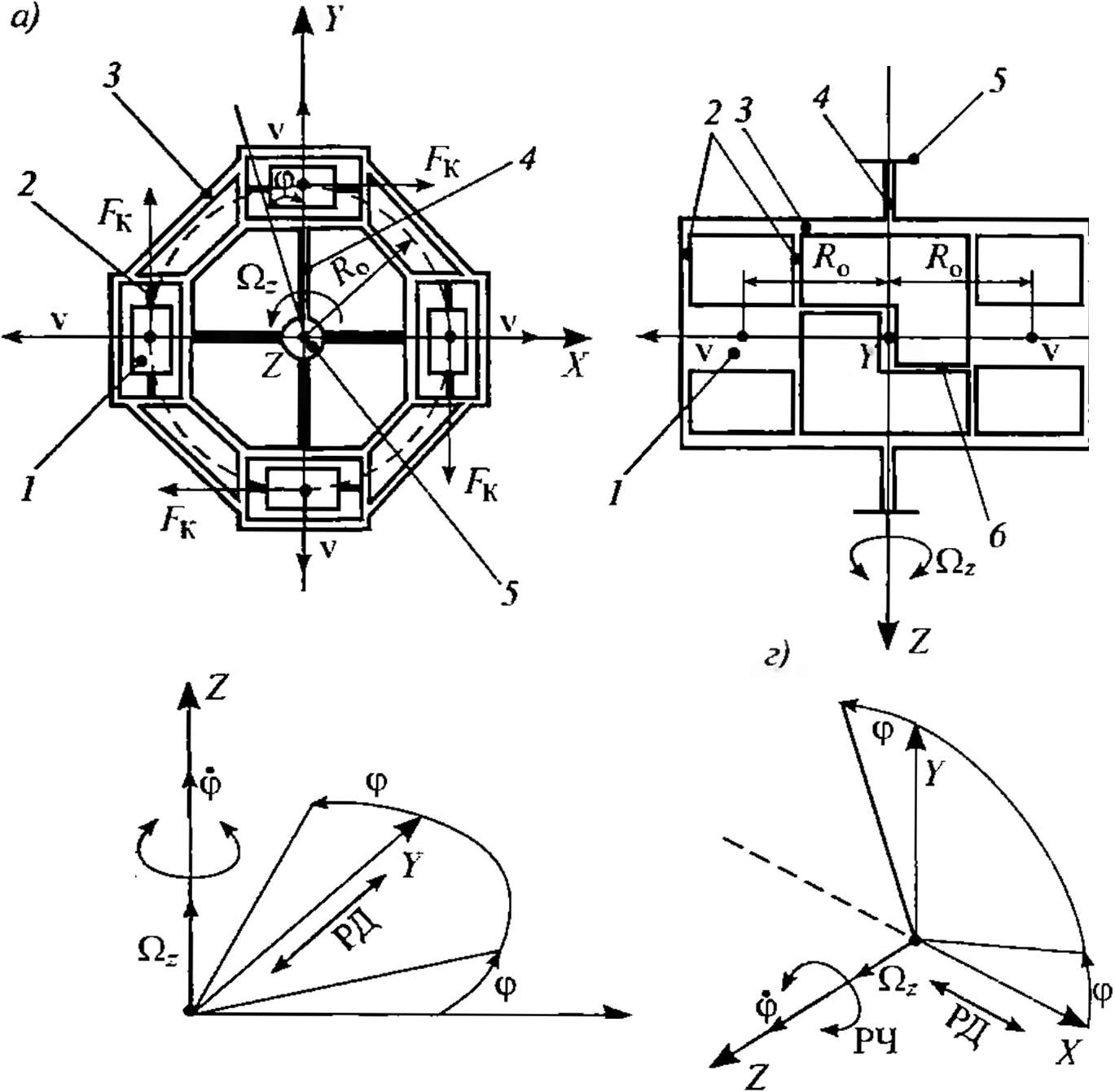
В схемах ИМ 1 связаны упругими элементами 2 с жесткими элементами 3 подвеса, которые, в свою очередь, через упругие элементы 4 повеса и анкеры (элементы крепления) 5 соединены с подложкой. Микроструктуры ЧЭ располагаются на некотором расстоянии над подложкой.
ЧЭ, собранный по схеме рис. 4.8 работает следующим образом. ИМ имеют возможность благодаря малой жесткости упругих элементов 2 в направлении осей X и Y синхронно в противофазе перемещаться относительно жестких элементов конструкции с помощью приводов со скоростями V.
Тем самым реализуется РД в направлении осей X и Y. При появлении угловой скорости £Х вокруг оси Z возникает ускорение Кориолиса и, соответственно, на каждой ИМ — силы инерции Кориолиса, которые находятся в плоскости XY. Эти силы действуют на плече, равном радиусу Rc окружности, проходящей через центры ИМ, и развивают момент вокруг оси Z, равный Mz =4FKR0 ~ mvQ.zR0 (т ~ масса ИМ). Момент Mz из-за малой изгибной жесткости упругих элементов 4 приводит к их деформированию и угловым перемещениям ИМ вместе с жесткими элементами конструкции вокруг оси Z. .Таким образом реализуется РЧ вокруг оси Z. [1]
 Рис
4.8 Принципиальные схемы ЧЭ:
Рис
4.8 Принципиальные схемы ЧЭ:
а — перемещения ИМ в РД и РЧ в одной плоскости; в, г - направления РД и РЧ: / - ИМ; 2 - упругие элементы подвеса РД; 3 - жесткие элементы подвеса; 4 - упругие элементы подвеса РЧ; 5 - анкеры; 6 - кинематическая связь