

3.1.2 Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело, ось вращения которого способна изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на неё моментов внешних сил.
3.1.3 Вибрационные гироскопы
Вибрационные гироскопы - устройства, сохраняющие свои колебания в одной плоскости при повороте. Данный тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрирующие гироскопы» - так как принцип их действия основан на эффекте силы Кориолиса, как и у роторных гироскопов.
Разновидности:
1. Пьезоэлектрические гироскопы.
2. Твердотельные волновые гироскопы.
3. Камертонные гироскопы.
4. Вибрационные роторные гироскопы
5. MEMS гироскопы.
3.1.4 Оптические гироскопы
Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка и теоретически объясняется с
помощью СТО (Специальная теория относительности). Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта. В то время как в неинерциальной системе она может отличаться.
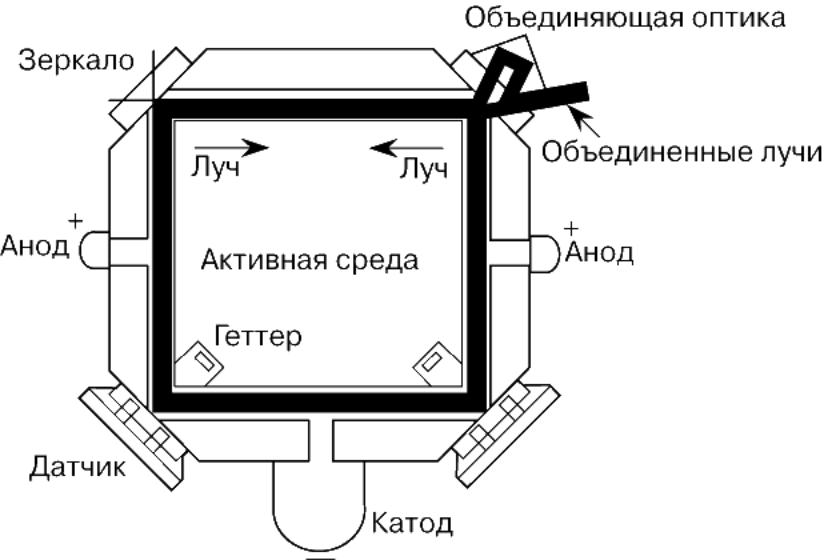
Рис.3.3 Схема действия лазерного гироскопа
При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча.
4. Микромеханический гироскоп.
4.1.1 Принцип действия
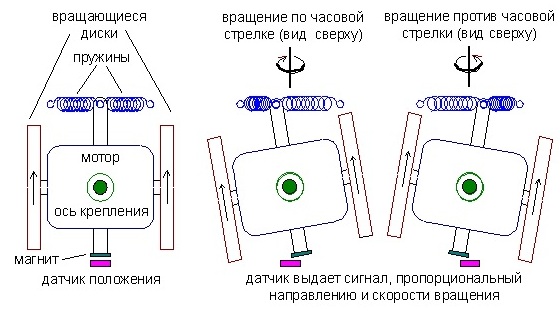
Рис.4.1 Принцип действия ММГ
Принцип действия ММГ основан на измерении вторичных колебаний инерционной вибрирующей массы, которые возникают под действием кориолисовых сил инерции при вращении основания. Одним из эффективных способов увеличения точности в таких гироскопах является использование резонансных свойств чувствительного элемента (ЧЭ) датчика. При этом первичные колебания возбуждаются на собственной частоте его механического резонанса. Максимальная чувствительность датчика достигается при равенстве собственных частот первичных и вторичных колебаний. Однако погрешности изготовления не позволяют обеспечить такую настройку с необходимой точностью. Кроме того, приборы с резонансной настройкой имеют очень узкую полосу пропускания. Специалисты считают, что наиболее эффективный путь повышения точности – это создание приборов с активным управлением характеристиками первичных и вторичных колебаний.
Вопросам разработки высокоточных ММГ и повышения их точности посвящено множество статей и патентов, при этом в большей их части объектом исследований и разработки являются приборы прямого типа измерения.
Публикации о принципах создания высокоточных ММГ компенсационного типа носят более поверхностный или фрагментарный характер, что обусловлено, по всей видимости, стремлением авторов защитить свои “ноу-хау”, а так же тем, что высокоточные ММГ являются в ряде стран (США, Франция, Германия, Великобритания) продукцией двойного назначения.
Среди доступных публикаций можно отметить стандарт IEEE 1431-2004 по испытаниям ММГ, а также статьи зарубежных исследователей Geen J., Ward P, Clark W.A. , Shkel A, Geiger W, Link T.
В России публикаций о разработках ММГ существенно меньше. Причиной этого является несовершенство отечественной технологической базы и недостаточное финансирование проектов. Разработки ММГ ведутся в ГНЦ ФГУП “ЦНИИ “Электроприбор””, ЗАО “Гирооптика”, Раменском РПКБ, на кафедрах университетов СПб ГУАП, МИЭТ, ТРТУ и др. Из отечественных публикаций можно отметить монографии В.Я. Распопова и А.С. Неаполитанского, статьи А.М. Лестева, Л.П. Несенюка, М.И. Евстифеева, С.Г. Кучеркова, Л.А.Северова, В.К. Пономарева, А.И. Панферова, Я.А. Некрасова, Ю.В. Шадрина, В.Э. Джашитова, Ю.А. Чаплыгина, Д.П. Лукьянова, А.П. Мезенцева.
Приведены результаты математического моделирования, исследования динамики и погрешностей, ударных воздействий, разработки конструкций и отработки технологических процессов изготовления микромеханических гироскопов. В системах управления робототехнических комплексов в качестве датчиков первичной информации все более широкое применение получают микромеханические гироскопы (ММГ). На рис 4.2 представлен общий вид ММГ. ММГ характеризуются сверхмалыми массой и габаритами, малым энергопотреблением, чрезвычайно низкой стоимостью и, вместе с тем, высокой устойчивостью к внешним воздействиям. В комплексе со спутниковыми навигационными системами, дальномерными системами и иными источниками внешней информации ММГ позволяют создавать малогабаритные инерциальные системы управления робототехнических комплексов, обеспечивающие необходимую точность определения параметров ориентации и позиционирования.[8]
О бщий
вид конструкции ММГ, кинематика ЧЭ
(чувствительный элемент) которого,
показана
на рис 4.2.
бщий
вид конструкции ММГ, кинематика ЧЭ
(чувствительный элемент) которого,
показана
на рис 4.2.
ЧЭ (чувствительный элемент) состоит из восьми ИМ 1, которые на упругих элементах 2 подвеса сформированы с круговой рамкой 5, закрепленной, в свою очередь, посредством четырех радиальных упругих элементов 4 на анкерах 5, связанных с подложкой. В режиме движения все ИМ, образующие ЧЭ, с помощью гребенчатых электростатических двигателей 6 перемещаются в радиальных направлениях со скоростями v. Каждая пара диаметрально противоположных ИМ перемещается синхронно и в противофазе.
Роторные гребенчатые структуры двигателей сформированы вместе с ИМ, а статорные расположены на подложке. При угловой скорости Q вокруг оси, перпендикулярной к плоскости подложки, возникают силы инерции Кориолиса, которые создают момент сил, вызывающий разворот рамки вместе с ЧЭ относительно подложки. При заданных на рис. 4.2 мгновенных направленных скоростей v и П вращающий момент направлен по часовой стрелке. Угловые перемещения рамки измеряются емкостными датчиками перемещений 7, роторные части которых сформированы вместе с рамкой, а статорные - с подложкой.
Другим направлением в современных разработках ММГ являются приборы с дисковыми резонаторами, совершающими крутильные колебания. Это так называемые вращательные вибрационные ММГ (ВВММГ) или ММГ RR-типа. Такие приборы представляют собой резонатор в виде диска, закрепленный на торсионах (как правило, на четырех). При помощи электростатических датчиков силы (ДС), например, гребенчатых приводов, диск приводится в колебательное движение вокруг оси Z. перпендикулярной его плоскости. Электрокинематическая схема, поясняющая принцип действия такого ММГ, показана на рис. 4.3. При вращении прибора вокруг оси, лежащей в его плоскости, вследствие действия силы Кориолиса возникают колебания, перпендикулярные плоскости диска. В результате этого один край диска начинает подниматься, а другой — опускаться в зависимости от текущего направления колебаний возбуждения. Съем информации осуществляется электростатическими ДП, представляющими собой конденсаторы, одна обкладка которых находится на поверхности диска, а другая на подложке под диском (четыре секторных электрода). Изменение емкости этих четырех конденсаторов несет информацию об угловой скорости вращения прибора вокруг осей Х и Y. [5]
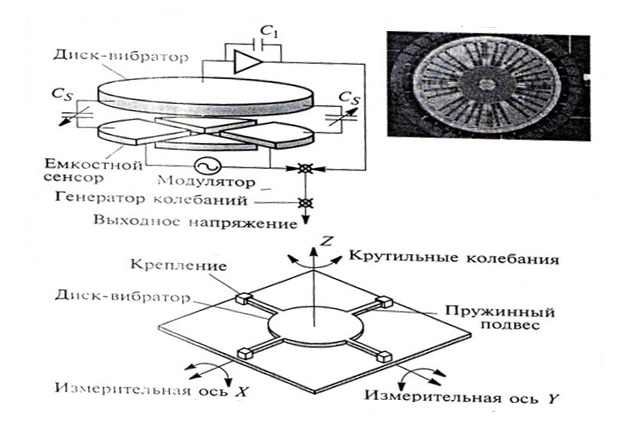
Рис 4.3 Схема, поясняющие принцип действия, и внешний вид ВВММГ
Колебания чувствительных масс в каждой из схем возбуждаются электростатическим гребенчатым виброприводом. В конструкциях приборов реализуется компенсационный (с обратной связью) режим работы. Сигналы снимаются с помощью емкостных датчиков; в системах обратной связи применены электростатические датчики силы. Электромеханические узлы ММГ рассматриваемых типов вместе с элементами вибровозбуждения колебаний, датчиками съема и преобразования полезного сигнала, элементами обратных связей формируются методами современной микроэлектроники на основе кремниевой технологии .
При исследовании динамики, определении собственных частот и соответствующих им форм колебаний, вынужденных колебаний и процессов их установления использовались модели ММГ с сосредоточенными и распределенными параметрами. [5]
Модели с сосредоточенными параметрами исследовались аналитическими методами, с распределенными – методом конечных элементов, реализуемым с использованием вычислительной системы Pro/MECHANICA. Зависимости амплитуд вынужденных колебаний чувствительных масс ММГ от частоты вибровозмущения (резонансные кривые) показаны на рис. 4.4. На рис. 4.4а, приведена резонансная кривая для ММГ с поступательными движениями чувствительных масс в окрестности собственной частоты (~ 12 кГц), соответствующей поступательным колебаниям чувствительных масс в противофазах. Для рассматриваемой конструкции ММГ амплитуда вынужденных колебаний чувствительных масс вдоль оси Х (см. рис. 1) при резонансной настройке составляет ~ 25 мкм. Амплитуды вынужденных колебаний чувствительных масс вдоль осей Y и Z при этом пренебрежимо малы (измеряемая угловая скорость равна нулю).
а) б)
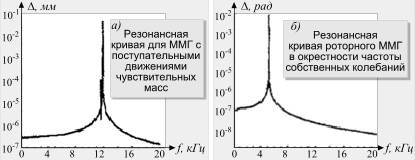
Рис. 4.4. Частотные характеристики ММГ
Резонансная кривая роторного ММГ в окрестности частоты собственных колебаний (~ 5 кГц) приведена на рис. 4.4б. В этой схеме амплитуда вынужденных угловых колебаний ротора при резонансной настройке составляет ~ 3°. Следует отметить острый характер резонанса, объясняющийся высокой добротностью кремниевого осциллятора. Указанное обстоятельство требует применения точной резонансной настройки, заключающейся в обеспечении и поддержании в процессе работы строгого совпадения частоты вибровозбуждения с собственной частотой осциллятора. В этом состоит одна из основных проблем, возникающих при разработке ММГ.