

18 Потери энергии в переходных процессах электропривода при линейном задании скорости
В общем случае потери энергии в переходном процессе электропривода при плавном управляющем воздействии можно записать так:
 ,
,
![]() ,
(2)где
,
(2)где ![]()
Для
получения наглядного представления о
потерях энергии в переходном процессе
примем допущения:
![]() ,
,
![]() ,
соотношения между величинами сохраняются
на всем интервале переходного
процесса,статическая скорость
,
соотношения между величинами сохраняются
на всем интервале переходного
процесса,статическая скорость
![]() равна конечному значению .
равна конечному значению .
 что
позволяет электромагнитную энергию
А1
записать в виде
что
позволяет электромагнитную энергию
А1
записать в виде
 ,
(6) где
,
(6) где
![]()
П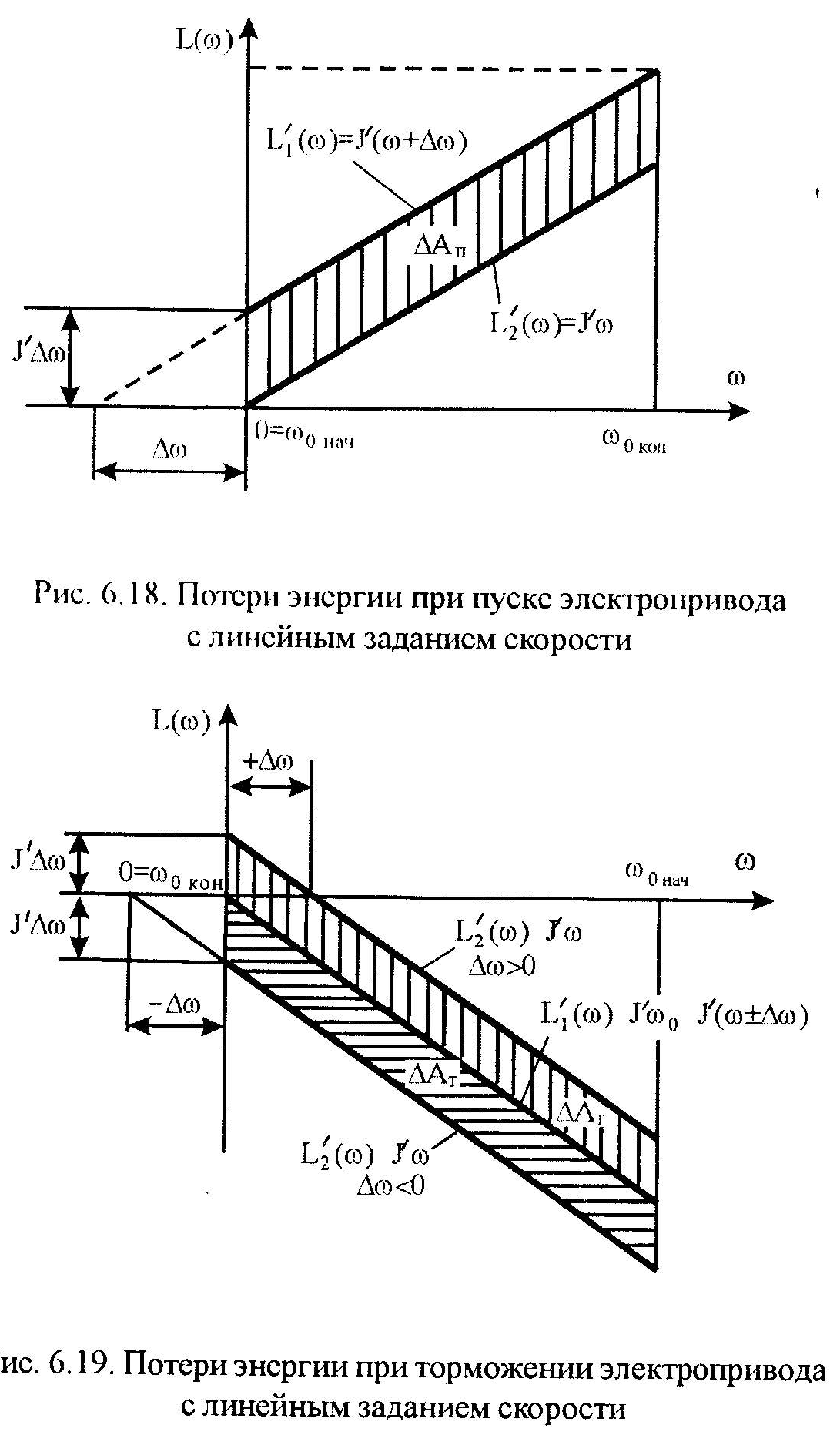 олная
механическая энергия А2
за время переходного процесса
электропривода
олная
механическая энергия А2
за время переходного процесса
электропривода

![]()
Потери энергии за время переходного процесса ,
г
![]() ,
(10)
,
(10)
![]() ,
,
При торможении электропривода возможны случаи:
а)
Когда
![]() тогда
тогда
б)
Когда
![]() тогда
тогда
в)
![]() и
и
![]() ,
что соответствует свободному выбегу.
,
что соответствует свободному выбегу.
При
Мс=0:
![]() ,
,
![]()
![]() ,
,
О бычно
бычно
![]() ,
значит, использование линейного задания
скорости идеального холостого хода
позволяет уменьшить потери энергии по
сравнению с прямым пуском в 5 и более
раз
,
значит, использование линейного задания
скорости идеального холостого хода
позволяет уменьшить потери энергии по
сравнению с прямым пуском в 5 и более
раз
19 Выбор электродвигателей: общие сведения.
Электропривод должен в наибольшей степени соответствовать условиям работы механизма, приводимого им в движение. Только в этом случае можно обеспечить высокопроизводительную, надежную и экономичную работу технологической установки. Поэтому электропривод проектируется совместно с проектированием рабочей машины и технологического процесса.
По технико-экономическим соображениям в общем случае электропривод должен удовлетворять ряду требований, иногда противоречивых:
иметь минимально возможные габариты и массу,
иметь низкую стоимость,
обеспечивать высокую надежность работы,
быть простым в управлении,
не оказывать вредного влияния на питающую сеть,
не создавать помех для работы других электропотребителей
Чтобы выполнить эти требования, необходимо последовательно решить следующие вопросы:
1) изучить особенности работы исполнительного механизма и выполнения технологического процесса,
выбрать тип электропривода (регулируемый или нерегулируемый),
выбрать род тока и тип электродвигателя,
выбрать напряжение и частоту питающей сети,
произвести расчет мощности и выбрать электродвигатель и передаточный механизм (если он предварительно не задан),
разработать систему управления и выбрать ее элементы,
сделать технико-экономическое обоснование выбранного варианта,
выполнить конструктивную разработку узлов и размещение электрооборудования на промышленной установке.
В установках, где не требуется регулирования скорости по технологическим условиям, обычно применяют асинхронные двигатели с короткозамкнутым ротором как наиболее дешевые, надежные в работе и имеющие высокие коэффициенты полезного действия и коэффициент мощности. Но недостатком являются большие пусковы и тормозные токи, а также удары в механической передаче, следует рассмотреть вопрос возможности и целесообразности использования устройств мягкого пуска и торможения. Если по технологическим условиям возможна достаточно длительная работа асинхронного двигателя с небольшими нагрузками, то следует оценить целесообразность применения полупроводникового регулятора напряжения, работающего автоматически в функции загрузки электродвигателя.
Регулирование ЭП обычно рассматривается от простейший до более сложных:
1)многоскоростные АД (полюсно-переключаемые ).
2) асинхронные двигатели с фазным ротором и реостатным (дискретным или импульсным) регулированием скорости,
3)частотное регулирование
4)Регулирование ЭП постоянного тока
5)каскадные схемы
Определение мощности и выбор электродвигателя является наиболее трудоемким и ответственным этапом проектирования электропривода. Применение двигателей завышенной мощности приводит к увеличению капитальных затрат и эксплуатационных расходов, связанных со снижением КПД и коэффициента мощности (для АД). Если выбран двигатель недостаточной мощности, то при этом возникают тепловые перегрузки, ускоренное старение изоляции, понижение надежности работы и возможность аварии.
Длительное
воздействие нагрузки на двигатель
ограничивается допустимым нагревом, а
кратковременное – перегрузочной
способностью:
![]() ,
(7.1)
,
(7.1)
В
асинхронном двигателе максимальный
(критический) момент Мк
зависит от квадрата напряжения. Поэтому
допустимый критический момент Мк.доп
определяют с учетом возможного снижения
напряжения на 10%:
![]() ,
(7.2)
,
(7.2)
Перегрузочная
способность асинхронных двигателей на
естественной механической характеристике
составляет
![]() .
.
Для
синхронных двигателей максимальный
момент определяется возможностью
устойчивой работы в синхронном режиме.
Для синхронных двигателей
![]() .
.
Ограничение по нагреву электродвигателей определяется теплостойкостью их изоляции.
Режимы работы ЭД:
1)длительная работа с мало меняющейся нагрузкой 2)динамические,с меняющейся нагрузкой.
Вторая группа электродвигателей предназначена для механизмов с частыми пусками, торможениями, реверсами и большой частотой включений. В своем большинстве это механизмы кратковременного и повторно-кратковременного режимов работы. Характерной особенностью электродвигателей второй группы является повышенная перегрузочная способность (электрическая и механическая), уменьшенные потери энергии на разгон (меньший диаметр и большая длина ротора), обеспечение большой частоты включений.
Электродвигатели выбирают :по мощности, скорости, напряжению, току, условиям эксплуатации и монтажа. Выбор двигателей по мощности выполняют в соответствии с нагрузочными диаграммами механизмов и режимами работы.
Скорость электродвигателя выбирается такой, чтобы обеспечить необходимый технологический процесс производственного механизма. При заданном передаточном числе редуктора или другой передачи этот вопрос решается однозначно. Если передаточное число не задано, то его выбирают оптимальным, исходя из определенного критерия: быстродействия, минимуму потерь, минимума массы редуктор-двигатель и т.д.
Напряжение электродвигателя выбирается, исходя из номинального напряжения источника питания. При известной мощности и напряжении однозначно определяется ток электродвигателя.
При выборе электродвигателя необходимо учитывать условия эксплуатации, под которыми понимают воздействие климатических факторов, а также состояние окружающей среды.