15. К.П.Д. И коэффициент мощности регулируемого электропривода.
Все
способы регулирования скорости
электроприводов можно разделить на две
группы. 1ая- при которых скорость
идеального холостого хода w0
электродвигателя остается постоянной.
2ая - скорость идеального холостого хода
w0
электродвигателя изменяется с помощью
управляющего воздействия. Для выявления
особенностей к.п.д.
регулируемого электропривода при
w0=const
рассмотрим реостатное регулирование
скорости ДПТ НВ. Запишем к.п.д ДПТ НВ в
виде
![]() ,(6.70)
,(6.70)
Для
двигательного режима момент на валу М2
можно выразить через электромагнитный
момент М и потерю момента:
![]()
Для двигателей постоянного тока при регулировании скорости принимают
![]() ,
,
![]() , (6.73)
где
, (6.73)
где
![]()
При
номинальном магнитном потоке![]()
![]() .Разделим
числитель и знаменатель на величину
РНОМ=МНОМωНОМ,
в результате получим
.Разделим
числитель и знаменатель на величину
РНОМ=МНОМωНОМ,
в результате получим
![]() (6.77)
(6.77)
где
 (6.78)
(6.78)
Если
определить диапазон регулирования
скорости:
![]() (6.79)
(6.79)
Для
электродвигателей нормального исполнения
при μ=1![]() (6.81)
(6.81)
А
теперь посмотрим, как будет изменятся
к.п.д.
асинхронного двигателя при ω0=const
и изменении угловой скорости ротора ω
за счет скольжения s.
K.п.д.
асинхронного двигателя:
![]() (6.82)
(6.82)
При
понижении скорости ротора с увеличением
скольжения механические потери
уменьшаются, а потери в стали ротора
возрастают. Их сумму примерно можно
считать постоянной, тогда
![]() (6.83)
(6.83)
Получаем
к.п.д.
Для
линейной части ест механической
характеристики АД справедливо соотношение
![]() ,
,
Разделив
числитель и знаменатель (6.84) на
РНОМ=ωНОММНОМ
и принимая во внимание (6.85), найдем
 (6.86)
(6.86)
где
![]() (6.87)
(6.87)
![]() (6.88)
(6.88)
Рассмотрим к.п.д. и коэффициент мощности регулируемого электропривода при ω0=var.
Если
регулирование скорости ДПТ НВ
осуществляется изменением подводимого
напряжения при постоянном токе
возбуждения, равном номинальному, то
постоянные потери мощности в регулируемом
ДПТ НВ![]()
Для
частотного регулирования АД по закону
Ф=const
имеем
![]() (6.90)
где m=1,3÷1,5;
(6.90)
где m=1,3÷1,5;
![]() .
.
Если
не учитывать постоянные величины потерь
на создание магнитного поля (![]() и
и
![]() ),
то постоянные потери ДПТ НВ и АД будут
примерно пропорциональны квадрату
относительной скорости
),
то постоянные потери ДПТ НВ и АД будут
примерно пропорциональны квадрату
относительной скорости
![]()
примем,
что
![]()
Введем
коэффициент загрузки двигателя моментом
![]() (6.93)
(6.93)
С учетом этих обозначений определяем мощность на валу электродвигателя
![]() и
суммарные потери мощности
и
суммарные потери мощности
![]()
где
![]() К.п.д. регулируемого электродвигателя
определяется отношением мощности на
валу к потребляемой мощности:
К.п.д. регулируемого электродвигателя
определяется отношением мощности на
валу к потребляемой мощности:
![]()
к.п.д.
 является
функцией двух независимых переменных
(
является
функцией двух независимых переменных
(![]() ),
где в качестве парам выступают ном
к.п.д.
),
где в качестве парам выступают ном
к.п.д.
![]() и коэффициент потерь а.
и коэффициент потерь а.
Решив
уравнение
![]()
![]() найдем
оптимальный коэф загрузки регулируемого
эд
найдем
оптимальный коэф загрузки регулируемого
эд
![]() (6.100)
который
соответствует равенству постоянных и
переменных потерь.
(6.100)
который
соответствует равенству постоянных и
переменных потерь.
К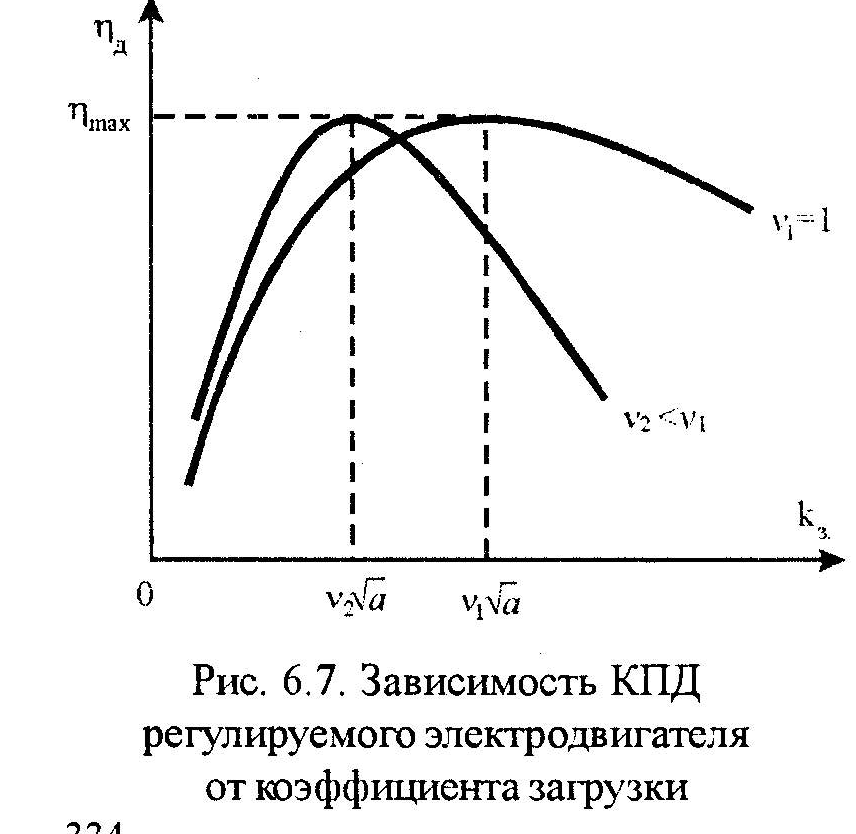 оэффициент
полезного действия регулируемого
электропривода включает произведение
трех к.п.д.: управляемого преобразователя,
электродвигателя и передаточного
механизма, т.е.
оэффициент
полезного действия регулируемого
электропривода включает произведение
трех к.п.д.: управляемого преобразователя,
электродвигателя и передаточного
механизма, т.е.
![]()
Коэффициент мощности kM определяется выражением
 где Р
– активная
где Р
– активная
![]()
![]()
![]()
![]() ,
,
![]()
16.
ПОТЕРИ
ЭНЕРГИИ В ПЕРЕХОДНЫХ ПРОЦЕССАХ
ЭЛЕКТРОПРИВОДА(ω0=CONST)
![]() .
.
Потери
энергии в переходных процессах
электропривода зависят от системы
электропривода и способа формирования
переходного процесса и в общем случае
определяются выражением
где ΔP(t) – суммарные потери мощности в данный момент времени переходного процесса, tП.П. – время переходного процесса.
Главнейшим фактором, определяющим потери энергии в переходном процессе, является характер изменения скорости ω0 идеального холостого хода.
В электроприводах с ω0=const управляющее воздействие изменяется скачком. Потери мощности в якорной цепи ДПТ НВ и в роторной цепи АД: ΔР= РЭМ – РМХ=М(ω0–ω)
Соответственно потери энергии будут равны разности электромагнитной А1 и полной механической А2 энергий электропривода: ΔА= А1 – А2
где  (6.123)
(6.123)
Pассмотрим
частный случай при МС=0:
М=МДИН=J![]() ,
,
что
при подстановке в (6.123) и (6.124) приводим
к результату
 (6.126)
(6.126)
 (6.127)
(6.127)
где ω1 и ω2 – угловые скорости электродвигателя в начале и в конце переходного процесса, J – суммарный момент электропривода.Произведение Jω есть момент количества движения и имеет размерность H·м·с·рад.
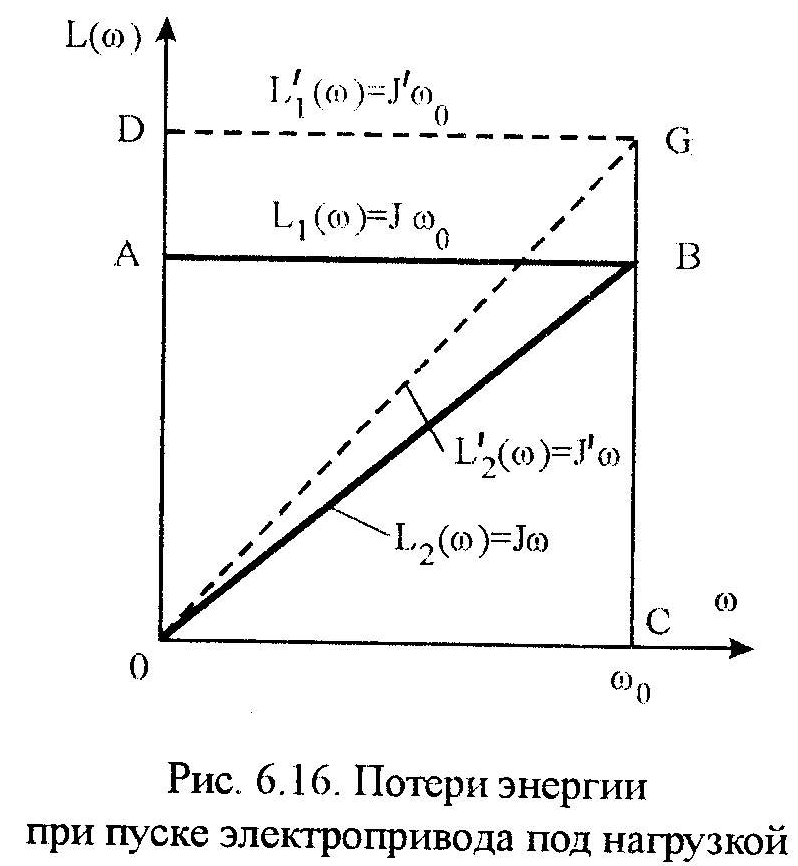
П отери
энергии в электроприводе можно записать
в виде
отери
энергии в электроприводе можно записать
в виде

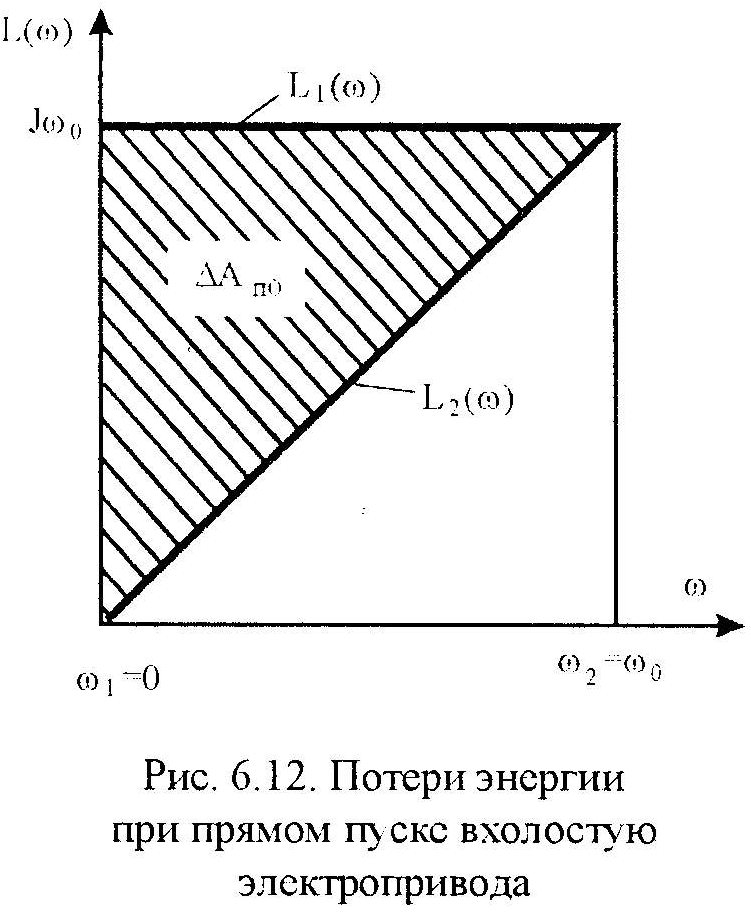
Где L1(ω)=Jω0, (6.132) L2(ω)=Jω,
Соотношение (6.131) можно представить графически
Возьмем интегралы:

 (6.134)
(6.134)
 (6.135)
где Δω = ω2
– ω1
ωсρ=
½(ω2
+ ω1)
В результате можем записать общую
формулу для определения потерь энергии
в якорной (роторной) цепи электропривода
за время переходного процесса при
ω0=const
и МС=0:
ΔА0
= JΔω(ω0
– ωсρ) при
ω0=const
и МС=0.
(6.135)
где Δω = ω2
– ω1
ωсρ=
½(ω2
+ ω1)
В результате можем записать общую
формулу для определения потерь энергии
в якорной (роторной) цепи электропривода
за время переходного процесса при
ω0=const
и МС=0:
ΔА0
= JΔω(ω0
– ωсρ) при
ω0=const
и МС=0.
Пуск
вхолостую:
ω1=0;
ω2=ω0;
ωсρ=
½(ω2
+ ω1)=
½ ω0;
Δω = ω2
– ω1=
ω0.
Находим А1=Jω0Δω=J![]() ;
А2=JωсρΔω=
½ J
;
ΔАпо=А1
– А2=J
– ½ J
;
А2=JωсρΔω=
½ J
;
ΔАпо=А1
– А2=J
– ½ J![]() =
=
![]() .
.
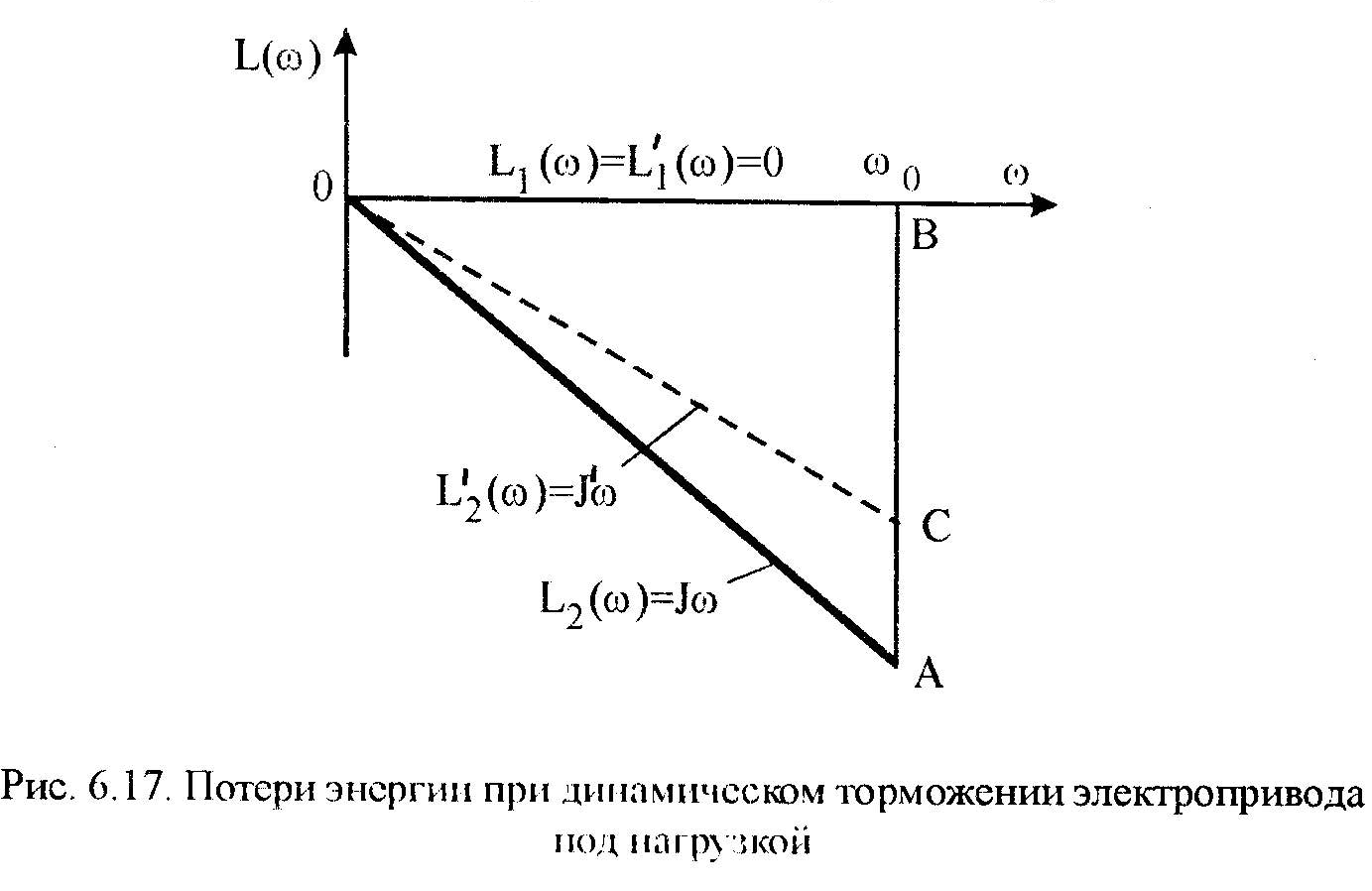
Д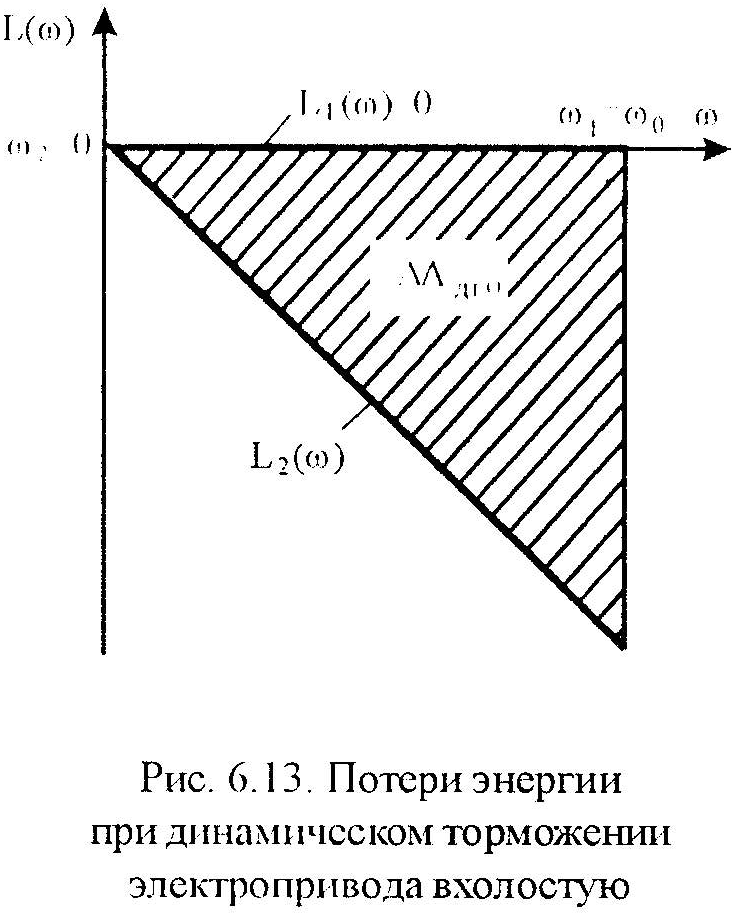 инамическое
торможение вхолостую:
инамическое
торможение вхолостую:
ω1=ω0; ω2=0; ωсρ= 0,5(ω2 + ω1)= 0,5ω0; Δω = ω2 – ω1= –ω0.
Так как при динамическом торможении якорь электродвигателя отключен от силовой цепи, то L1(ω)=0; А1=0.
Полная механическая мощность: А2=JωсρΔω= –½ J
и
потери энергии ΔАдто=А1
– А2=0–(-½
J
)=
![]() .
.
Следовательно, при динамическом торможении вхолостую потери энергии равны запасу кинетической энергии электропривода, так как при динамическом торможении теряется вся накопленная механическая энергия (рис.6.13). поэтому при динамическом торможении вхолостую потери энергии равны потерям энергии при пуске вхолостую.
Торможение противовключением в холостую:
ω1=ω0; ω2=0; ω0<0; ωсρ= 0,5(ω2 + ω1)= 0,5ω0; Δω = ω2 – ω1=0–ω0= –ω0.
В ычисляем:
А1=Jω0Δω=J(-ω0)(-ω0)=J
;
А2=JωсρΔω=
½ J
ычисляем:
А1=Jω0Δω=J(-ω0)(-ω0)=J
;
А2=JωсρΔω=
½ J![]() (-ω0)=
–½J
;
ΔАпр.о=А1
– А2=J
–(–½ J
)=
(-ω0)=
–½J
;
ΔАпр.о=А1
– А2=J
–(–½ J
)=
![]()
Реверс вхолостую:
ω1=ω0; ω2= –ω0; ω0<0; ωсρ= 0,5(ω2 + ω1)= 0; Δω = ω2 – ω1= –2ω0.
Определяем: А1=Jω0Δω=J(-ω0)(-2ω0)=2J ;
А2=JωсρΔω= J·0·(-2ω0)=0;
ΔАрев.о=А1–
А2=2J
=![]()
П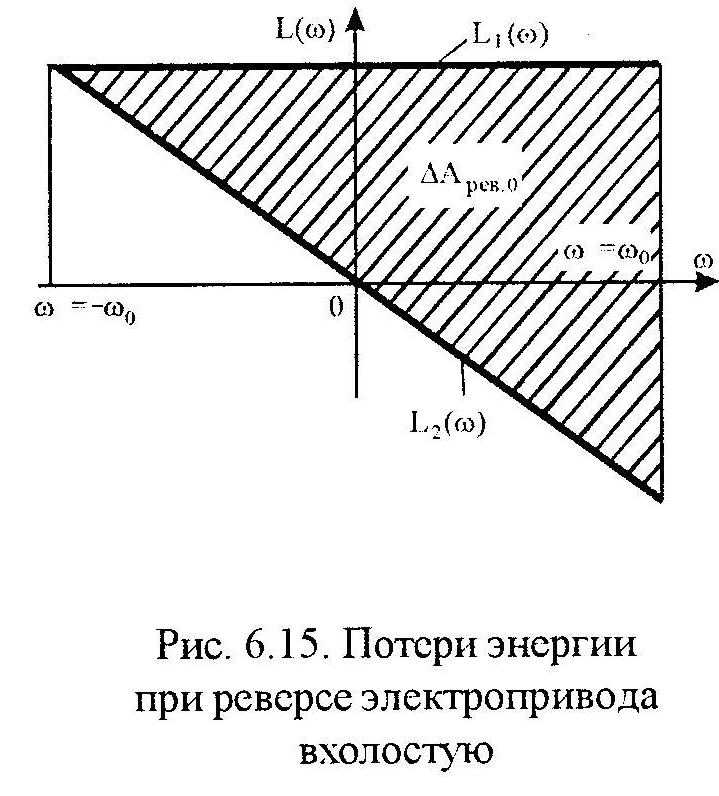 олученные
соотношения соответствуют потерям
энергии в якоре ДПТ НВ и в роторе АД.
Потери энергии ΔА1
в статоре АД определяются через потери
ΔА2
в роторе таким образом
олученные
соотношения соответствуют потерям
энергии в якоре ДПТ НВ и в роторе АД.
Потери энергии ΔА1
в статоре АД определяются через потери
ΔА2
в роторе таким образом
![]()
Теперь
можно записать суммарные потери энергии
в асинхронном двигателе в переходном
процессе электропривода вхолостую:
Где
![]() (6.141)
(6.141)
![]() (6.142)
(6.142)
17
ПОТЕРИ ЭНЕРГИИ В ПЕРЕХОДНЫХ ПРОЦЕССАХ
ЭЛЕКТРОПРИВОДА(ω0=const)
![]() .
.
Потери энергии в переходных процессах электропривода зависят от системы электропривода и способа формирования переходного процесса :
Главнейшим фактором, определяющим потери энергии в переходном процессе, является характер изменения скорости ω0 идеального холостого хода.
Потери мощности в якорной цепи ДПТ НВ и в роторной цепи АД:
ΔР= РЭМ – РМХ=М(ω0–ω)
Соответственно потери энергии будут равны разности электромагнитной А1 и полной механической А2 энергий электропривода:
ΔА= А1 – А2
Примем допущение, что в переходном процессе электромагнитный момент эд равен его среднему значению МСР.
![]()
![]()
![]() М(t)=Мср=
Мс+
Мдин
М(t)=Мср=
Мс+
Мдин
![]()
![]()
![]()
Пусть
![]() тогда
тогда
![]() ,
,
![]() ,
,
Потери
энергии в переходном процессе при
допущении
![]() будут равны:
будут равны:
 ,
,