

14 Кпд и коэффициент мощности нерегулируемого электропривода
Сначала рассмотрим к.п.д. и коэффициент мощности нерегулируемого электропривода. К.п.д. нерегулируемого электропривода представляет собой отношение мощности Рр.0 на рабочем органе машины к мощности Р1, потребляемой из сети:
![]() где
где
![]() (6.54)
(6.54)
![]()
n, д – соответственно к.п.д. механической передачи и к.п.д. электродвигателя,
Р2 – мощность на валу электродвигателя.
Если принять
для рабочего участка естественной
механической характеристики, где
скорость незначительно изменяется,
коэффициент загрузки
![]()
то, используя (6.17), к.п.д. электродвигателя можно записать таким образом:
![]() ,
где
,
где
![]() ,
,
Подставив
выражение коэффициента А через номинальный
к.п.д. ном
и коэффициент потерь а в (6.57), получим
окончательное выражение для к.п.д.
нерегулируемого электродвигателя
 (6.59)
(6.59)
Из (6.59) видно, что к.п.д. нерегулируемого электродвигателя является сложной функцией коэффициента загрузки Кз. Значение оптимального коэффициента загрузки, при котором к.п.д. достигает максимальной величины, определяем из решения уравнения
![]() , (6.60)
т.е.
, (6.60)
т.е. ![]() Подставив
(6.61) в (6.59), найдем максимум к.п.д.
Подставив
(6.61) в (6.59), найдем максимум к.п.д.
 Определим
переменные потери мощности при оптимальном
коэффициенте загрузки:
Определим
переменные потери мощности при оптимальном
коэффициенте загрузки:
![]() ,
,
с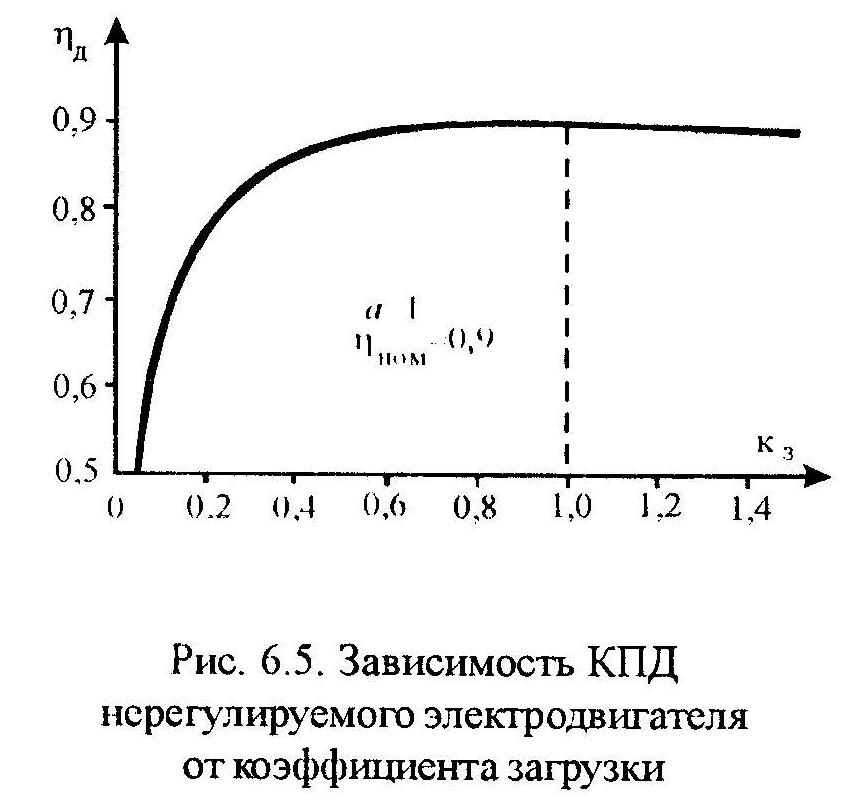 ледовательно,
максимум к.п.д. достигается, когда
постоянные потери становятся равными
переменным.
ледовательно,
максимум к.п.д. достигается, когда
постоянные потери становятся равными
переменным.
При а<1 максимум к.п.д. имеет место при нагрузке, меньше номинальной, а при а>1 – больше номинальной. Если а=1 то максимум к.п.д. соответствует номинальному к.п.д. (рис.6.5).
Обычно электродвигатели длительного режима (s1) проектируют таким образом, чтобы максимум к.п.д. был при коэффициенте загрузки Кз=0,75. этим самым учитывается возможность и наибольшая вероятность работы электродвигателя в режиме s1 с небольшой недогрузкой. С ростом мощности к.п.д. электродвигателя возрастает.
Для
электрических двигателей переменного
тока важным энергетическим показателем
является коэффициент мощности, который
при синусоидальных токах и напряжения
cos:
![]() ,
,
где Р1 – потребляемая электродвигателем активная мощность.
Q1 – “потребляемая” реактивная мощность из сети.
Для трехфазного
асинхронного двигателя
![]() ,(6.65)
,(6.65)
![]() , (6.66)
, (6.66)
где
![]() – намагничивающий ток, ток статора и
приведенный ток ротора,
– намагничивающий ток, ток статора и
приведенный ток ротора,
![]() – индуктивные
сопротивления намагничивающего контура,
рассеяния статора и ротора (приведенное).
– индуктивные
сопротивления намагничивающего контура,
рассеяния статора и ротора (приведенное).
Реактивную
мощность Q1
можно выразить через активную Р1,
используя треугольник мощностей:
![]()
Для большинства асинхронных двигателей cosном0,80,9, что дает
![]()
Х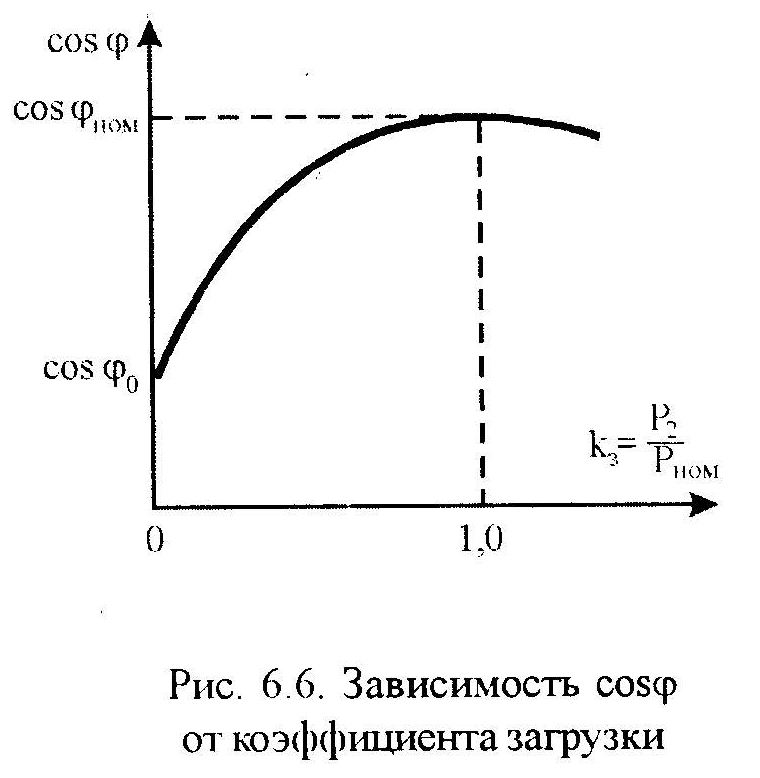 арактер
зависимости cos
от коэффициента загрузки показан на
рис.6.6.
арактер
зависимости cos
от коэффициента загрузки показан на
рис.6.6.
Поскольку потери мощности в активных сопротивлениях R источника, линии и приемника определяются полным током I, то при заданной активной мощности Р=Рср эти потери будут равны
![]() ,
,
где Iа – активная составляющая полного тока I,
Рn.т – потери при передачи мощности Р постоянным током (Iа=In.т).
выражение (6.69) показывает, что cos является энергетической характеристикой, определяющей экономичность потребления активной энергии на переменном токе, с увеличением cos уменьшаются потери при передаче заданной активной мощности от источника приемнику электроэнергии.
В синхронном двигателе cos зависит от нагрузки так же, как и в асинхронном.