

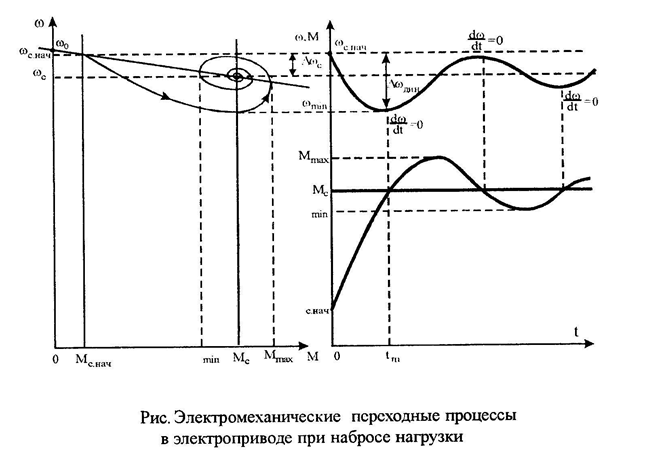
8. Электромеханические переходные процессы при набросе и сбросе нагрузки электропривода
Положим, что до наброса нагрузки электропривод работал в установившемся состоянии при условиях:
![]()
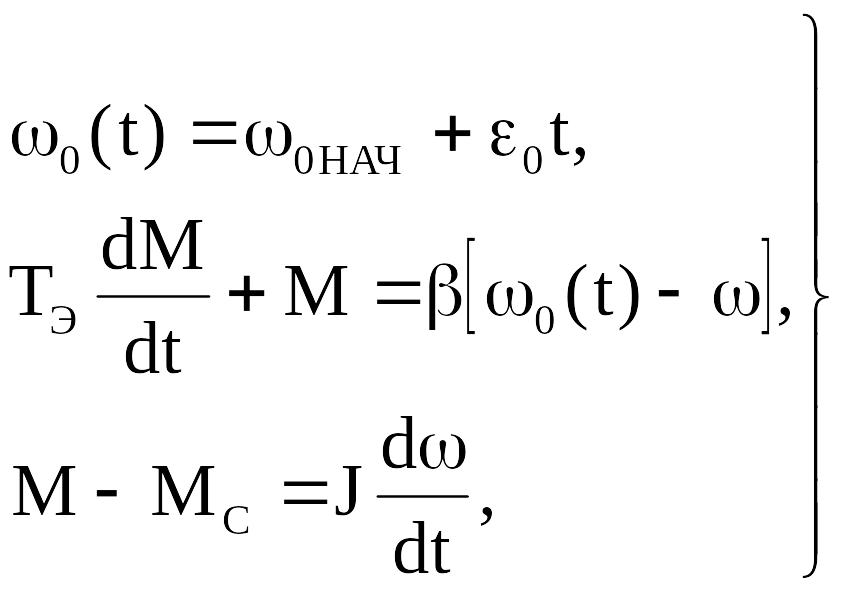
При этих условиях можно использовать уравнения
После
наброса нагрузки имеем
![]()
Цель исследования этого переходного процесса состоит в определении максимального динамического падения скорости, максимального электромагнитного момента и колебательности процесса.
Для определения экстремального значения скорости необходимо решить уравнение
![]() откуда
находим
откуда
находим
![]()
И
 Получим
Получим
Поскольку
 то
то
![]() где с
– статическое падение скорости.
где с
– статическое падение скорости.
Теперь Экстремальное значение скорости (tm) можно записать в виде
 или
или
Время tm достижения экстремальных значений скорости удобнее найти из условия Мдин = 0, что соответствует
Важной характеристикой для взаимосвязанных электроприводов (прокатное, текстильное производство и т. п.) является относительное восстановление скорости
определяющее качество выпускаемой продукции. Чем меньше восстановление скорости при набросе нагрузки, тем меньше переменная деформация материала, проходящего через взаимосвязанные электропривода.
Колебательность
переходного процесса оценивается
логарифмическим декрементом затухания
Принимая Тм = const можем найти отношение частот mmax , при котором достигается максимум частоты колебаний р.max , решив уравнение

П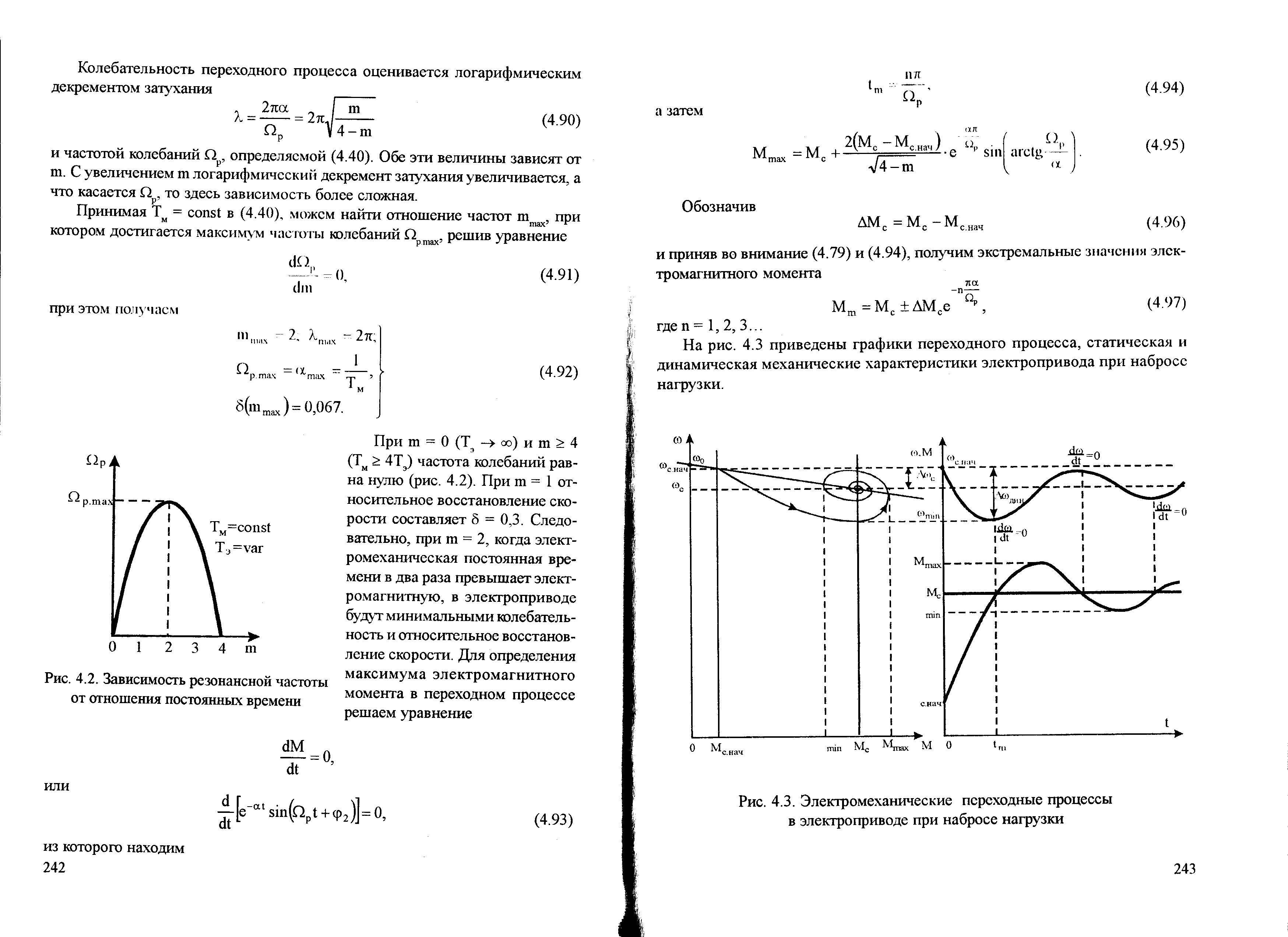 ри
m
= 0
(Тэ
)
и m
4 (Тм
4Тэ)
частота колебаний равна нулю (рис.4.2).
При m
=1 относительное восстановление скорости
составляет =0,3.
Следовательно, при m
= 2,
когда электромеханическая постоянная
времени в два раза превышает
электромагнитную, в электроприводе
будут минимальными колебательность и
относительное восстановление скорости.
Для определения максимума электромагнитного
момента в переходном процессе решаем
уравнение
ри
m
= 0
(Тэ
)
и m
4 (Тм
4Тэ)
частота колебаний равна нулю (рис.4.2).
При m
=1 относительное восстановление скорости
составляет =0,3.
Следовательно, при m
= 2,
когда электромеханическая постоянная
времени в два раза превышает
электромагнитную, в электроприводе
будут минимальными колебательность и
относительное восстановление скорости.
Для определения максимума электромагнитного
момента в переходном процессе решаем
уравнение
 или
или
 из
которого находим
из
которого находим
 а
затем
а
затем

получим
экстремальные значения электромагнитного
момента
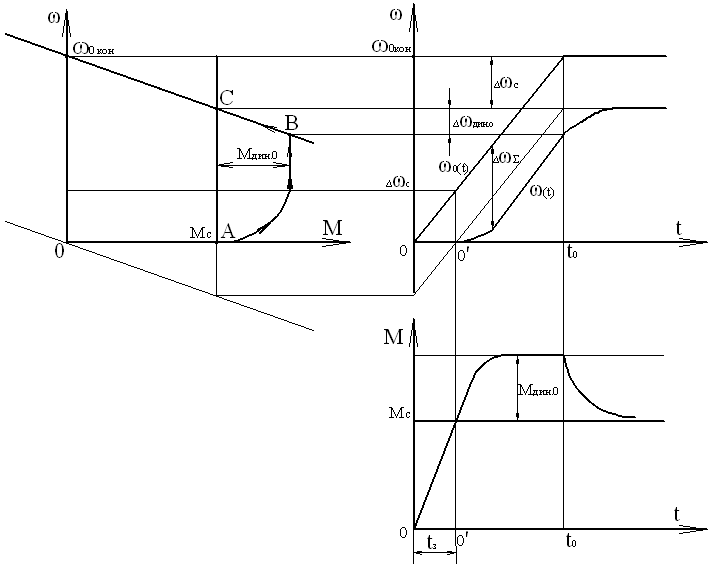
9 Переходные процессы электропривода с линейной механической характеристикой при линейном задании скорости идеального холостого хода
 где
где
ДляДПТ:![]() дляАД:
дляАД:![]()
![]()
Пуск ЭП с реактивным статическим моментом.
![]()
Переходный процесс развивается в 3 этапа:
1-ый
этап.
![]()

2-ой
этап:
![]()

3-ий
этап:
![]()

При
торможение
ε0<0;

При
t<3Tм,
![]() ,
,
![]()
Если Мс<|Мдин.0|, то торможение будет происходить в 2 этапа
Если Мс>|Мдин.0|, то торможение будет происходить в 1 этап .
При
Мс>|Мдин.0|:![]()
![]() .
.
При
Мс<|Мдин.0
:
![]()
![]()
При
t<3Tм;
![]() ,
При
t=t0
,
,
При
t=t0
,
![]()

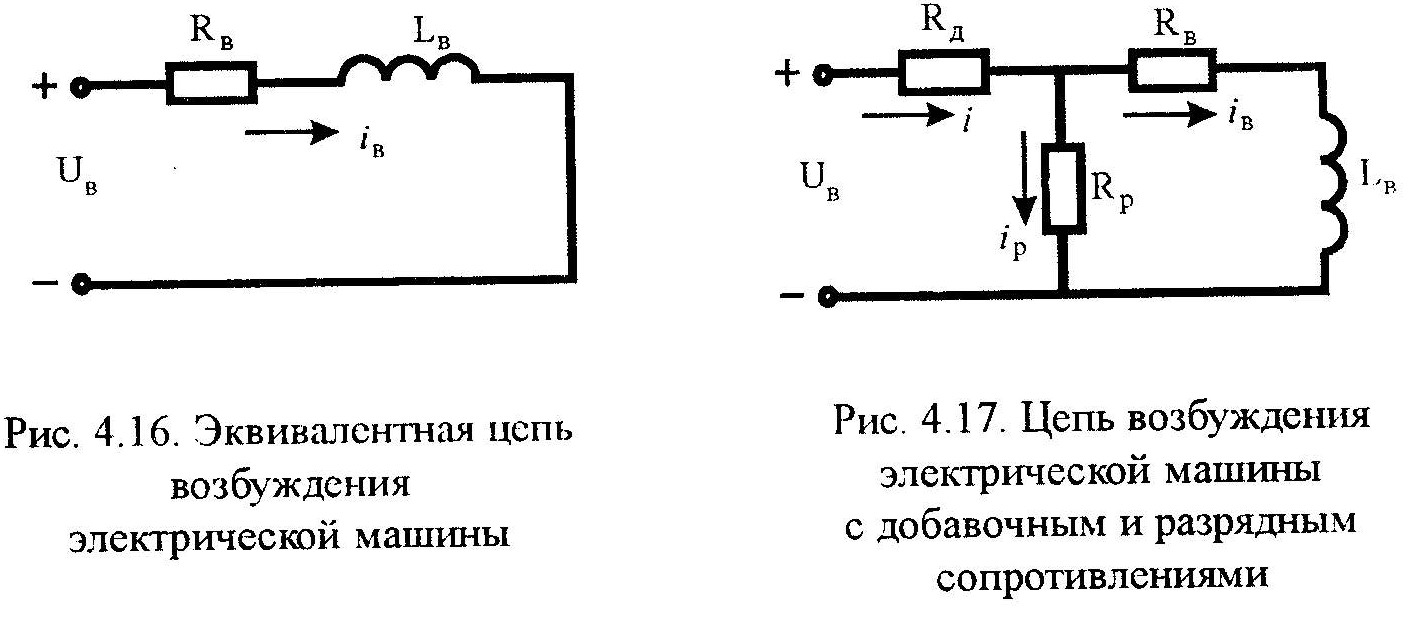
10 Переходные процессы в цепях возбуждения машин
Для
аналитического описания переходных
процессов примем следующие
допущения:отсутствует взаимная
индуктивность между обмотками возбуждения
и якорем,отсутствуют потери на гистерезис
и вихревые токи, отсутствует насыщение
магнитной системы, т.е.
![]() ,
напряжение обмотки возбуждения
,
напряжение обмотки возбуждения
![]() .
.
 ;
;

![]()
к оторое
делением левой и правой части на Rв
приводится к дифференциальному уравнению
оторое
делением левой и правой части на Rв
приводится к дифференциальному уравнению
![]() где
где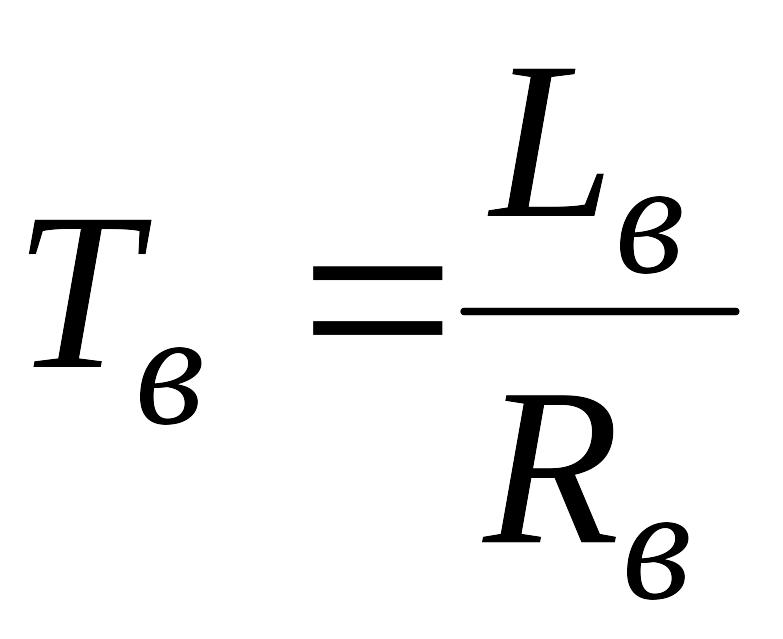
![]()
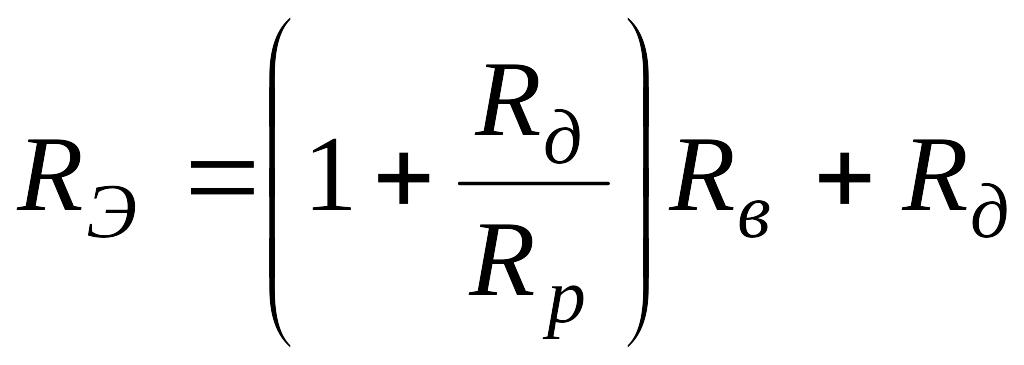
Для ускорения (форсирования) переходных процессов применяют следующие способы:
Уменьшение постоянной времени.
При включении последовательно с обмоткой возбуждения добавочного сопротивления Rд
![]() но
установившееся значение тока возбуждения
должно оставаться неизменным, т.е.
но
установившееся значение тока возбуждения
должно оставаться неизменным, т.е.
![]() Следовательно,
получаем, что для уменьшения постоянной
времени в
раз
Следовательно,
получаем, что для уменьшения постоянной
времени в
раз
![]() необходимо
увеличить напряжение
необходимо
увеличить напряжение
![]() .
Мощность источника возбуждения
.
Мощность источника возбуждения
![]()
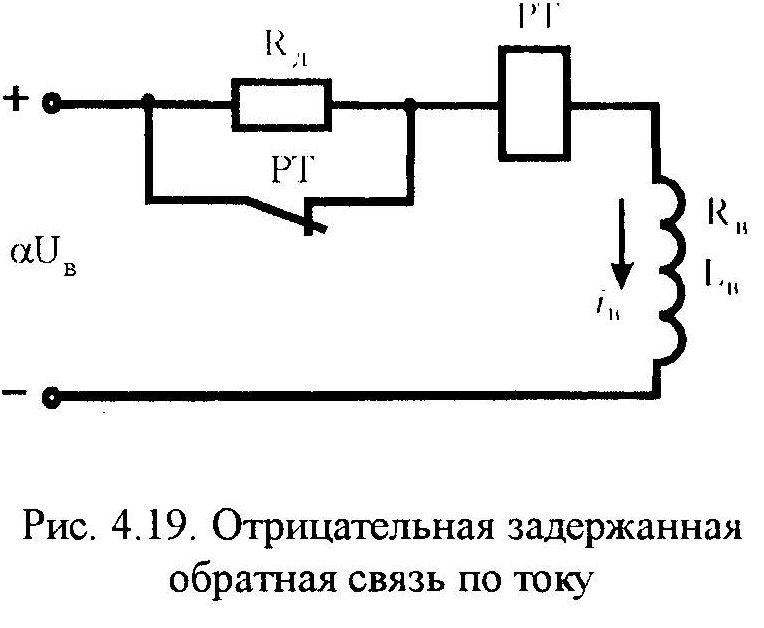
Задержанная отрицательная обратная связь.
![]() решением
которого при нулевых начальных условиях
будет
решением
которого при нулевых начальных условиях
будет
![]()
![]() откуда
находим
откуда
находим
![]()
Уменьшение времени переходного процесса составит
Для
=2
это будет
а
увеличение мощности источника питания
![]()
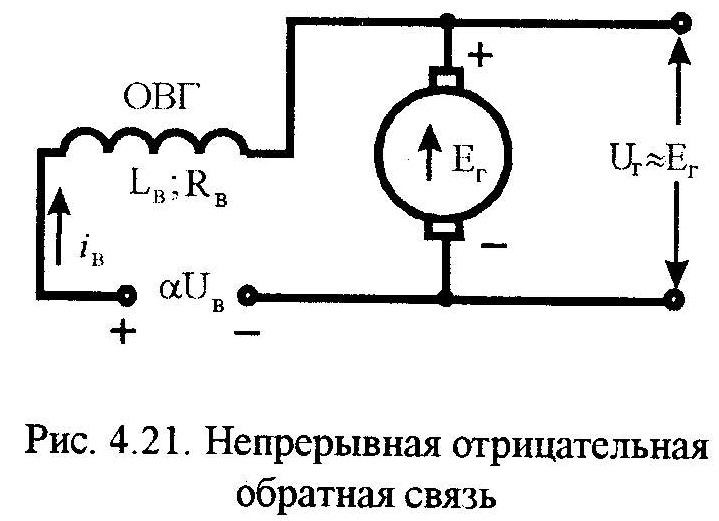
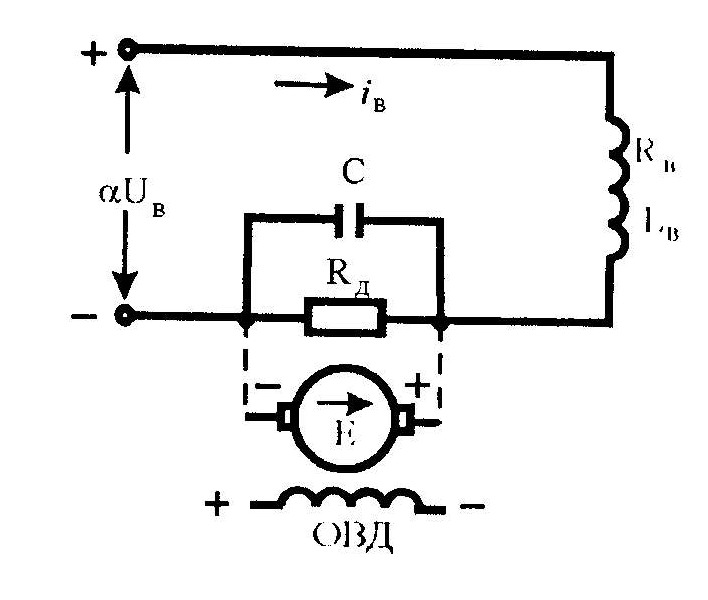
3. Непрерывная отрицательная обратная связь.
В
этом случае обмотку возбуждения
генератора (или электромашинного
усилителя) включают на разность
напряжений
![]() (Рис.4.21). Для цепи возбуждения можно
написать уравнение электрического
равновесия
(Рис.4.21). Для цепи возбуждения можно
написать уравнение электрического
равновесия
![]() ,
если принять
,
если принять
![]() .
.
Считая магнитную систему генератора ненасыщенной, имеем
![]() ,
где
,
где
![]() - коэффициент пропорциональности,
имеющий размерность Ом.
- коэффициент пропорциональности,
имеющий размерность Ом.
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]()
4. Включение емкости в цепь обмотки возбуждения.
 Ускорить
переходный процесс можно и за счет
включения емкости в цепь обмотки
возбуждения Весь ток
Ускорить
переходный процесс можно и за счет
включения емкости в цепь обмотки
возбуждения Весь ток
![]() будет проходить через добавочное
сопротивление
будет проходить через добавочное
сопротивление
![]() ,
которое при повышенном напряжении
,
которое при повышенном напряжении
![]() ограничивает ток на уровне установившегося
значения
ограничивает ток на уровне установившегося
значения![]() .
.
В
данной цепи возможен колебательный
характер переходного процесса. Для
апериодического процесса необходимо
выполнить условие
![]() ,
где
,
где
![]()
Величина
статической емкости составляет десятки
тысяч микрофарад. Вместо статической
емкости можно использовать так называемую
динамическую емкость: ДПТ НВ, работающий
вхолостую (см. Рис.4.23). Динамическая
емкость определяется из равенства
кинетической энергии ротора при холостом
ходе и энергии, запасенной в эквивалентном
конденсаторе, т.е.
![]() ,
откуда
,
откуда
![]() ,
,
![]() Форсирование
переходных процессов с использованием
емкости конденсаторов больше применяется
в цепях с электромагнитными реле, где
величина емкости незначительна.
Форсирование
переходных процессов с использованием
емкости конденсаторов больше применяется
в цепях с электромагнитными реле, где
величина емкости незначительна.