

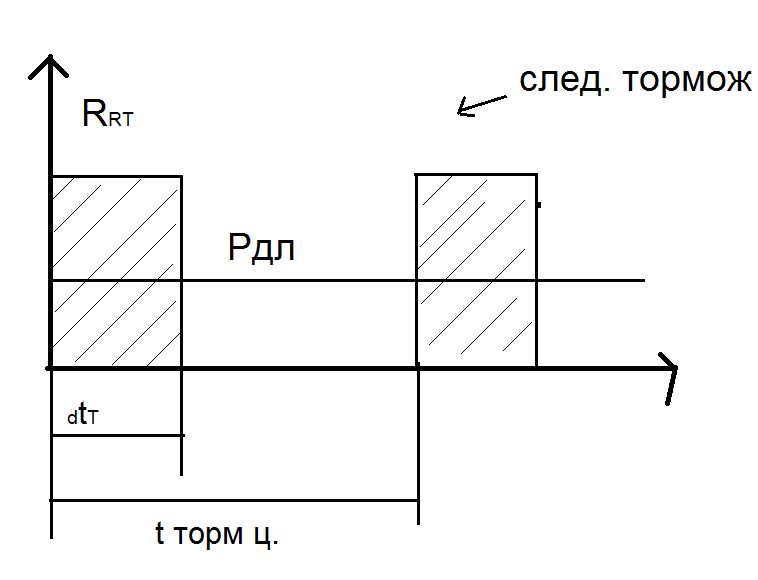
41 Расчёт резисторов для резистивного торможения ад
Резистивное торможение
Рдт=Мт*W*Ƞад*Ƞаин на валу двигателя
Rrt=F*V
Rrt=m*g*v*Ƞп*Ƞад*Ƞаин подъем
W=var
∆Wкин=![]() измен кинетич эн. ЭП.
измен кинетич эн. ЭП.
tT=время торможения
PRT=![]() *
Ƞп*Ƞад*Ƞаин=
*
Ƞп*Ƞад*Ƞаин=![]()
Ƞаин=0.98
PRT=![]() =>
RT=
=>
RT=![]() – ср. Величина Rt
– ср. Величина Rt
42 Регулирование скорости ад в каскадных схемах.
В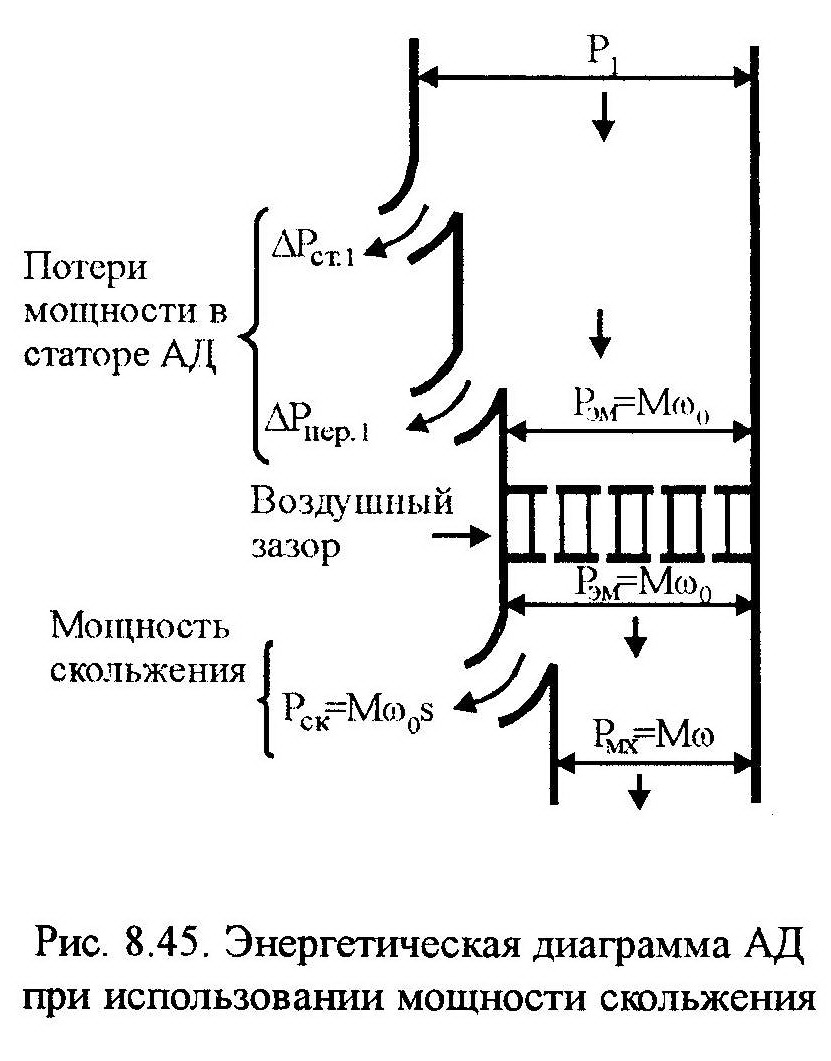 каскадных схемах регулируется мощность
скольжения (рис.8.45), которая или
возвращается в электрическую сеть или
превращается в механическую мощность,
передаваемую на вал главного двигателя.
каскадных схемах регулируется мощность
скольжения (рис.8.45), которая или
возвращается в электрическую сеть или
превращается в механическую мощность,
передаваемую на вал главного двигателя.
По способу использования мощности скольжения различают электромеханический и электрический каскады. В электромеханических каскадах мощность скольжения возвращается на вал асинхронного двигателя, а в электрических - в сеть.
По виду преобразовательного устройства каскадные схемы разделяются на: 1) каскады с промежуточным звеном постоянного тока и 2) каскады с непосредственным преобразователем частоты. Преобразовательные устройства могут быть электромашинными или статическими. В настоящее время в электроприводе используют статические преобразовательные устройства, обычно построенные на основе силовых полупроводниковых приборов.
Принцип регулирования скорости АД в каскадных схемах основан на введении добавочной ЭДС Еg частоты скольжения f2=f1s в цепь ротора. В этом случае ток в цепи ротора определяется выражением
![]() (8.284)
(8.284)
а электромагнитный момент
![]() (8.285)
(8.285)
где R2, X2 – активное и индуктивное сопротивления фазы ротора;
Е2 – ЭДС фазы ротора при s=1;
S – скольжение.
Если статический момент постоянный (Мс=const), то введение Еg со знаком минус приводит к уменьшению тока ротора (и момента), а следовательно, к возрастанию скольжения до значения, при котором наступает равновесие электромагнитного и статического моментов. При согласном введении добавочной ЭДС Еg (знак плюс) скольжение уменьшается, и равновесие моментов наступает при более высокой скорости. При этом возможна работа АД в двигательном режиме при отрицательном скольжении. Проблема такого регулирования состоит в том, чтобы добавочная ЭДС имела такую же частоту, которую имеет ток ротора. В зависимости от способов создания добавочной ЭДС и введения ее в цепь ротора АД существует много разновидностей каскадных схем. В настоящее время применяются две каскадные схемы: 1) машинно-вентильный (электромеханический) каскад и 2) асинхронно-вентильный (электрический) каскад.
43. Машинно-вентильный каскад, его свойства и характеристики .
электромеханический(машинно-вентильный ) каскад
Суммарная
мощность на валу электрических машин:
![]()
П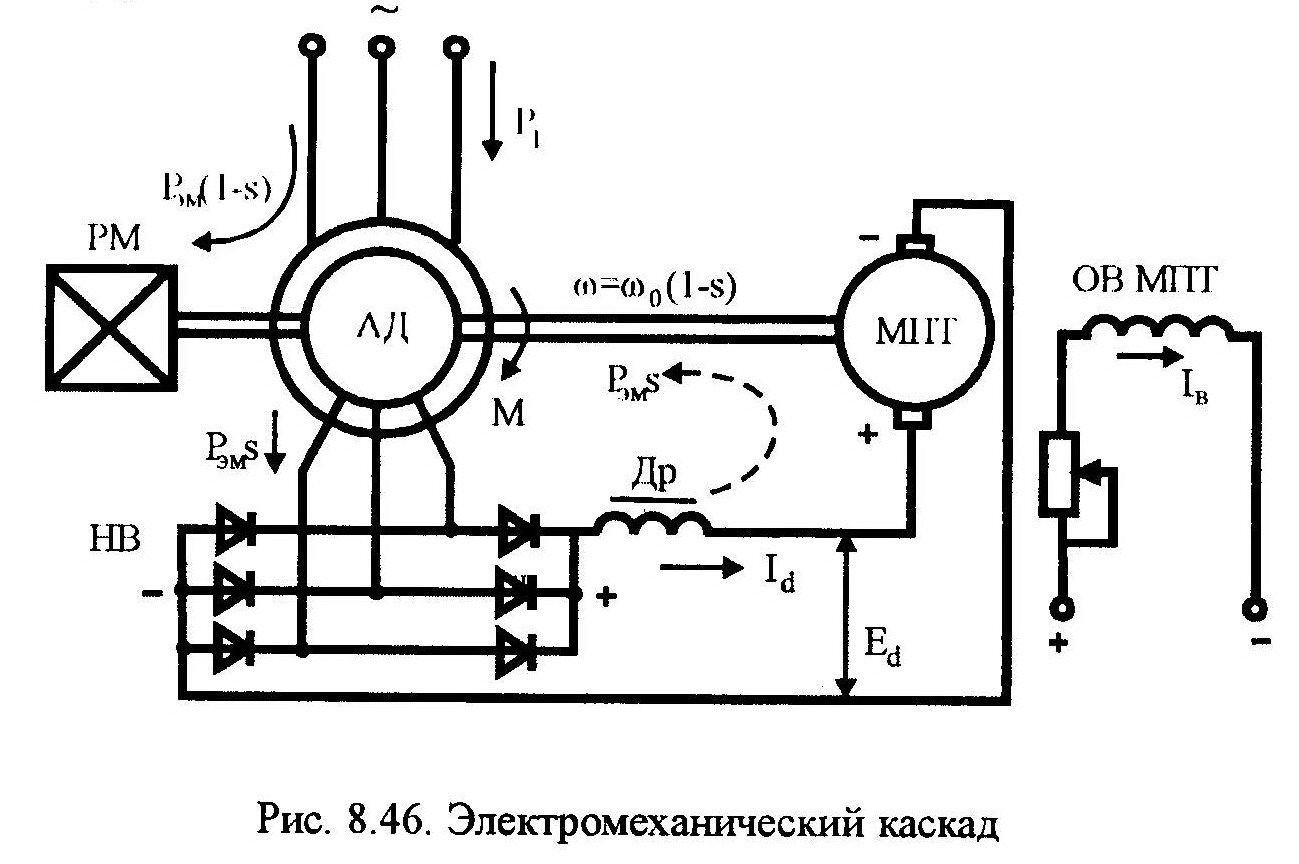 олная
механическая мощность PMx:
олная
механическая мощность PMx:![]()
Мощность
скольжения
![]()
Суммарная
механическая мощность (без учета
механических потерь) на валу электрических
машин составит:
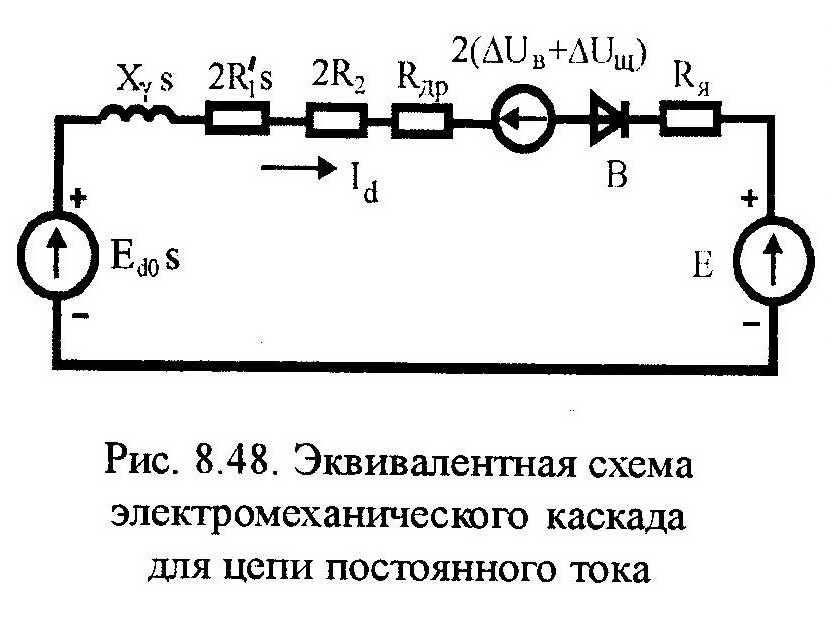
![]() Для
цепи постоянного тока электромеханического
каскада можно составить эквивалентную
схему, показанную на рис.8.48.
Для
цепи постоянного тока электромеханического
каскада можно составить эквивалентную
схему, показанную на рис.8.48.
![]()
![]()
![]() где
где
![]()
![]() тогда
можно записать выражение для выпрямленного
тока
тогда
можно записать выражение для выпрямленного
тока
![]()
![]()
В каскаде идеальным ХХ называется режим, когда выпрямленный ток равен нулю(Id=0).
Id=0:
![]()
![]() где
w0
– синхронная угловая скорость АД.
где
w0
– синхронная угловая скорость АД.
![]()
с помощью тока возбуждения Iв можно устанавливать необходимый магнитный поток Ф, а значит s0, и получать желаемую скорость w0к идеального холостого хода каскада. Так осуществляется регулирование скорости АД в электромеханическом каскаде.
Электромагнитную
мощность Рэм,
которая передается роторной цепи от
статора АД, можно выразить через параметры
выпрямленного тока:![]()
Выпрямленный ток ротора

где
![]() ,
,
 ,
,
 ,
,
![]()
Для
дальнейших преобразований обозначили
![]() ,
тогда
,
тогда
![]()
и электромагнитная мощность (8.303) с учетом (8.310) получает вид
 (8.311)
Обозначим
(8.311)
Обозначим
![]()
![]()
Максимальное
значение Рm
электромагнитная мощность принимает
при абсолютном скольжении
![]()
![]()
Разделив (8.314) на угловую скорость (8.301) идеального холостого хода каскада, получим выражение электромагнитного момента
 (8.317)
где
(8.317)
где ![]() (8.318)
(8.318)
Подобно
частотному управлению АД обозначим
относительную скорость идеального
холостого хода каскада
![]() (8.319)
(8.319)
![]()
![]()
![]()
параметрическое
уравнение семейства механических
характеристик электромеханического
каскада.
Жесткость этих характеристик
При sa<<skn- механические характеристики каскада можно линеаризовать:
![]()
![]()
л – модуль жесткости линеаризованных механических характеристик.
Нижняя
граница регулирования скорости в
электромеханическом каскаде ограничивается
допустимыми габаритами машины постоянного
тока. Мощность МПТ:
![]()
![]() (8.328)
(8.328)
Регулирование
скорости в каскаде экономичное, поскольку
потери мощности в роторной цепи
![]() пропорциональны
абсолютному скольжениюВ номинальном
режиме к.п.д. каскада составляет (8286),
а коэффициент мощности АД равен 0,750,85.
пропорциональны
абсолютному скольжениюВ номинальном
режиме к.п.д. каскада составляет (8286),
а коэффициент мощности АД равен 0,750,85.