

38 Скалярное частотное управление ад при стабилизации абсолютного скольжения.
При управлении асинхронным двигателем по закону М.П. Костенко: (8.99)
а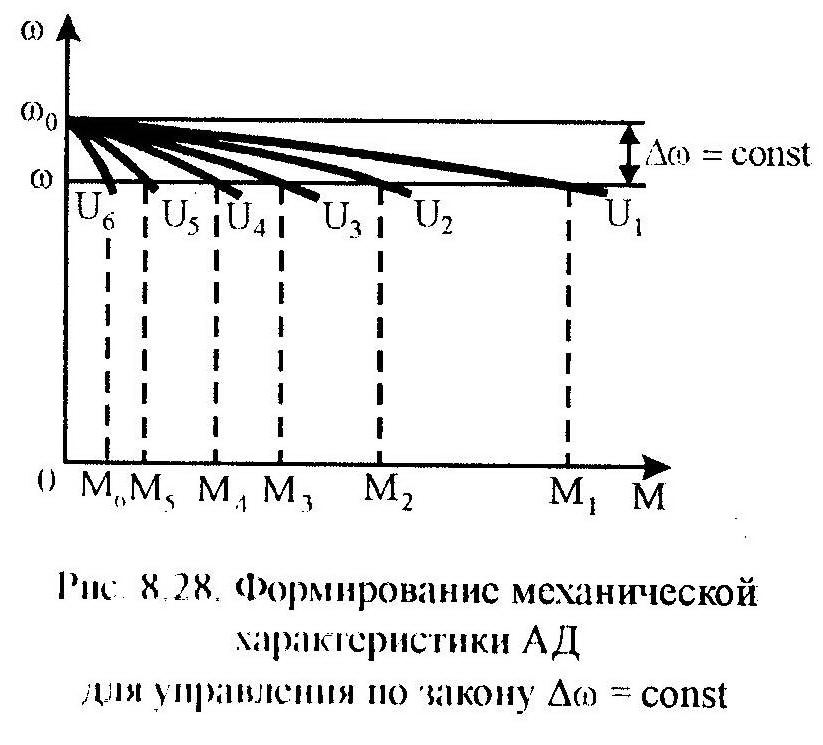 бсолютное
скольжение остается практически
неизменным. Отсюда следует, что если на
всех частотах поддерживать абсолютное
скольжение неизменным, то режим работы
АД будет близок к режиму при управлении
по (8.99).
бсолютное
скольжение остается практически
неизменным. Отсюда следует, что если на
всех частотах поддерживать абсолютное
скольжение неизменным, то режим работы
АД будет близок к режиму при управлении
по (8.99).
Скорость
АД: ![]() (8.236)
(8.236)
при
![]() =const
и данном α будет постоянной при изменении
нагрузки, поскольку каждому значению
момент М соответствует своя величина
напряжения U
(см. рис. 8.28).
=const
и данном α будет постоянной при изменении
нагрузки, поскольку каждому значению
момент М соответствует своя величина
напряжения U
(см. рис. 8.28).
Рассмотрим функциональную схему реализации частотного управления при =const (рис. 8.29), соответствующую следующим соотношениям:
![]() (8.237)
(8.237)![]() (8.238)
(8.238)
где
![]() – заданное значение угловой скорости
АД,
– заданное значение угловой скорости
АД, ![]() – заданное абсолютное скольжение
– заданное абсолютное скольжение ![]() – заданное значение синхронной угловой
скорости АД, которое определяет задающую
частоту
– заданное значение синхронной угловой
скорости АД, которое определяет задающую
частоту
![]() .
.
В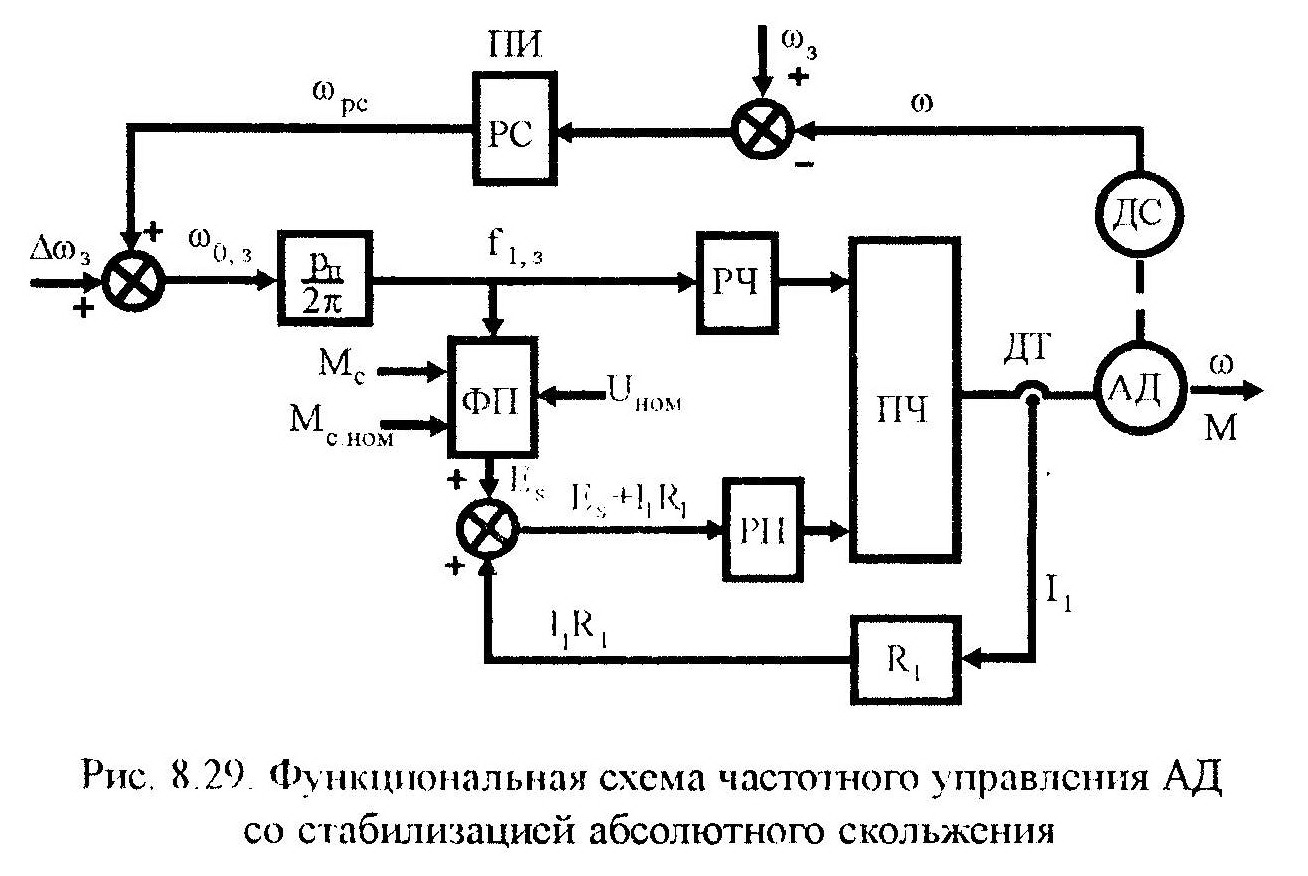 данной системе частотного управления
АД с помощью датчика скорости ДС
измеряется угловая скорость ω двигателя,
которая сравнивается с заданным значением
и их разность Δω направляется в
ПИ-регулятор скорости РС, выходная
величина которого
данной системе частотного управления
АД с помощью датчика скорости ДС
измеряется угловая скорость ω двигателя,
которая сравнивается с заданным значением
и их разность Δω направляется в
ПИ-регулятор скорости РС, выходная
величина которого
![]() суммируется с заданным падением скорости
суммируется с заданным падением скорости
![]() ,
формируя заданное значение синхронной
угловой скорости
и соответственно частоты
.
,
формируя заданное значение синхронной
угловой скорости
и соответственно частоты
.
Функциональный преобразователь ФП на основе информации о номинальном напряжении Uном, номинальном моменте Мном (или номинальном токе), текущем статическом моменте (или токе статора) формирует в соответствии с (8.238) значение ЭДС статора Еs, которая суммируется с падением напряжения I1R1, определяя выходное напряжение U преобразователя частоты ПЧ.
В установившемся режиме = и механические характеристики АД соответствуют (8.236).
В рассмотренных системах частотного управления АД величины переменного тока принимались синусоидальными. В реальных системах ПЧ-АД выходное напряжение преобразователя несинусоидальное, поэтому все законы частотного управления и соотношения между величинами будут справедливы применительно к первым (основным) гармоникам несинусоидальных периодических величин.
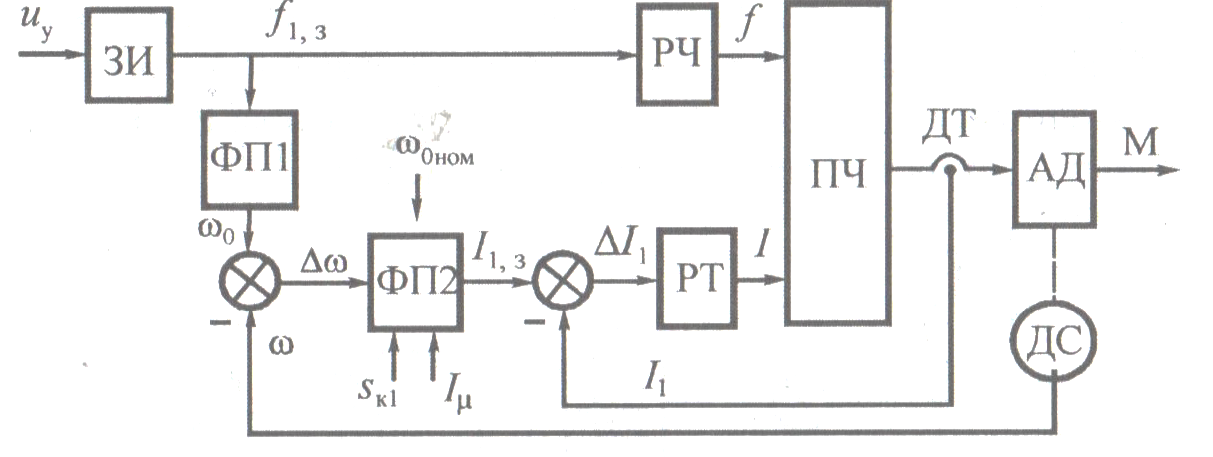
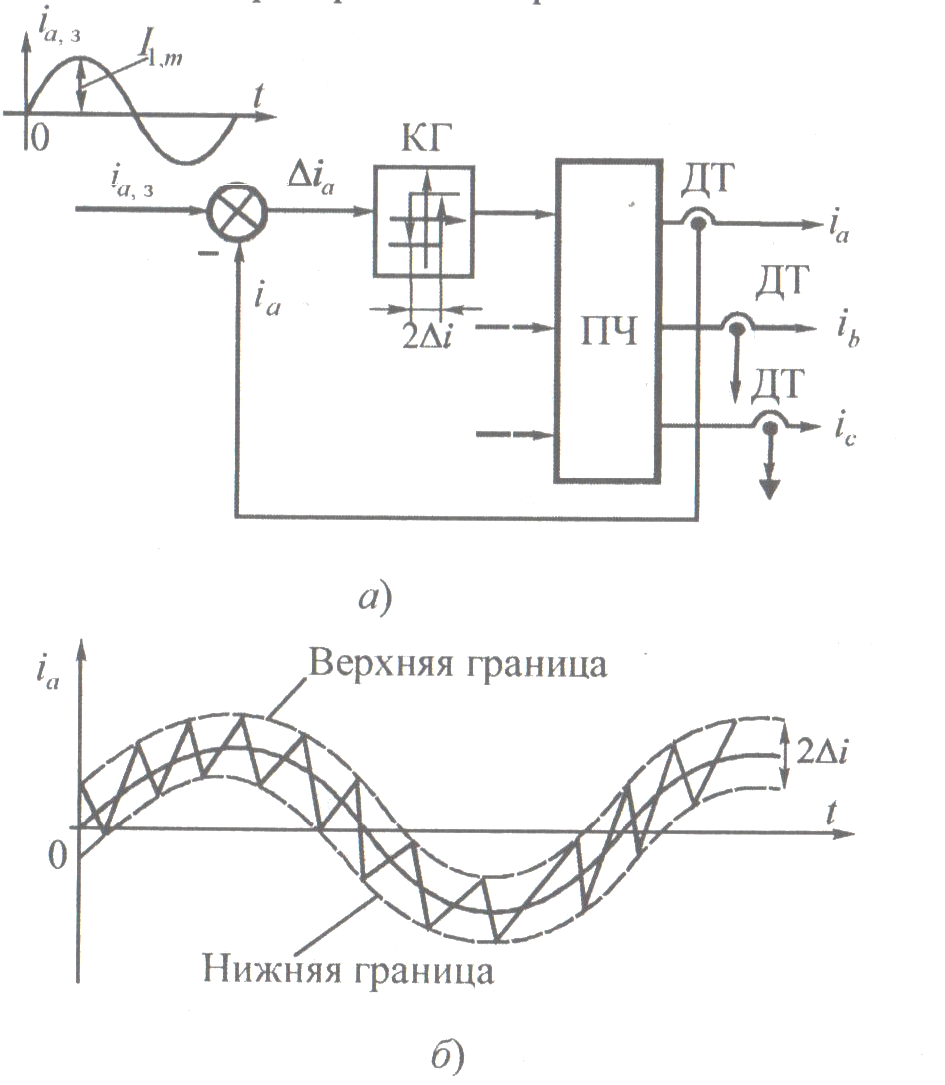
39. Скалярное частотно-токовое управление ад.
При
частотно-токовом управлении (ЧТУ)
асинхронным двигателем управляющими
величинами являются частота
![]() и величина тока
и величина тока
![]() статора
статора
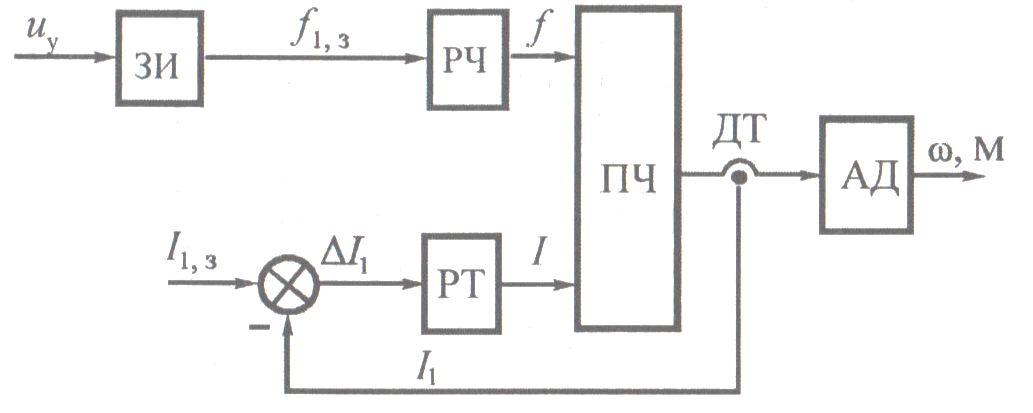
Рис 1.1. Функциональная схема разомкнутой системы ЧТУ.
 ,
где
,
где
 .
.
Ном.ток изм. по опред.зак. илистабил.
на опред.уровне
Рис. 1.2. Функциональная схема ЧТУ со стабилизацией потокосцепления.
Д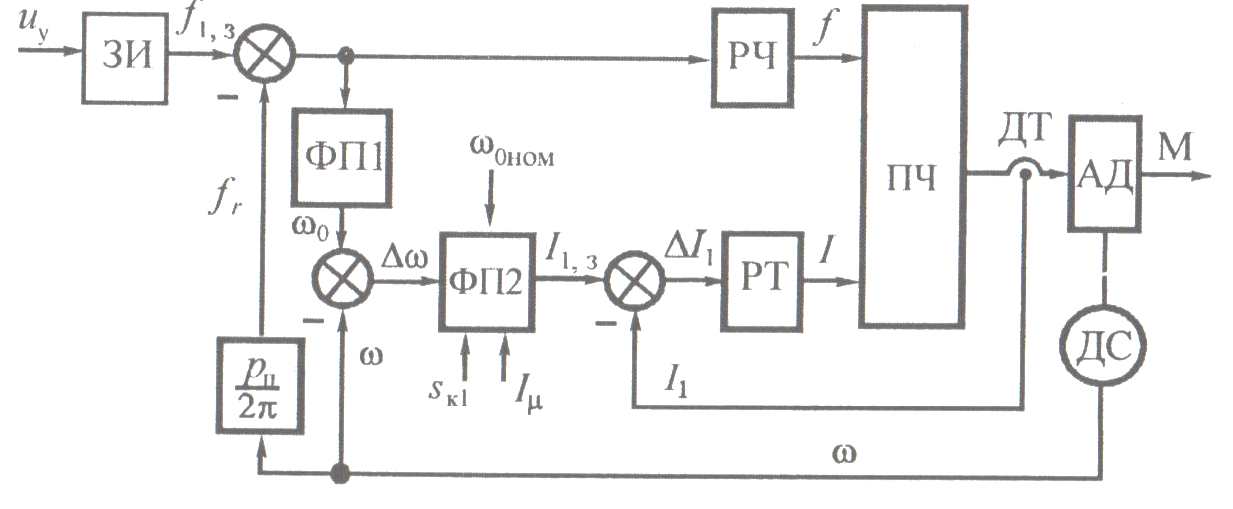 ля
расширения диапозона регулирования
скорости АД применяют обратную связь
по скорости
ля
расширения диапозона регулирования
скорости АД применяют обратную связь
по скорости
Рис 1.3. Функциональная схема ЧТУ с обратной связью по скорости.
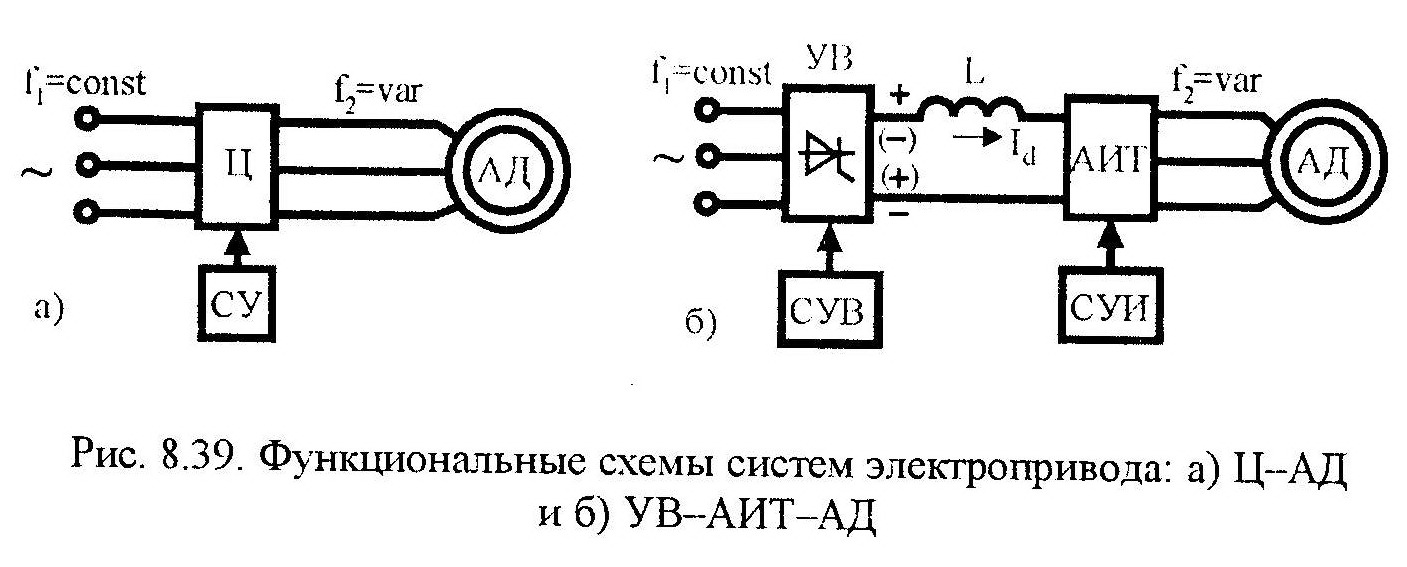
40.Рекуперативное и резистивное торможение частотно-управляемых эп
Резестивное – рекуп., энергия не в сеть, а рассеивается на тормозных сопротивлениях. Без доп технических средств рекуп торм возможно: 1)Циклоконвертор – АД(НПЧ-АД); 2)Управляемый выпрямитель – автономный инвертор тока – асинхронный двигатель.
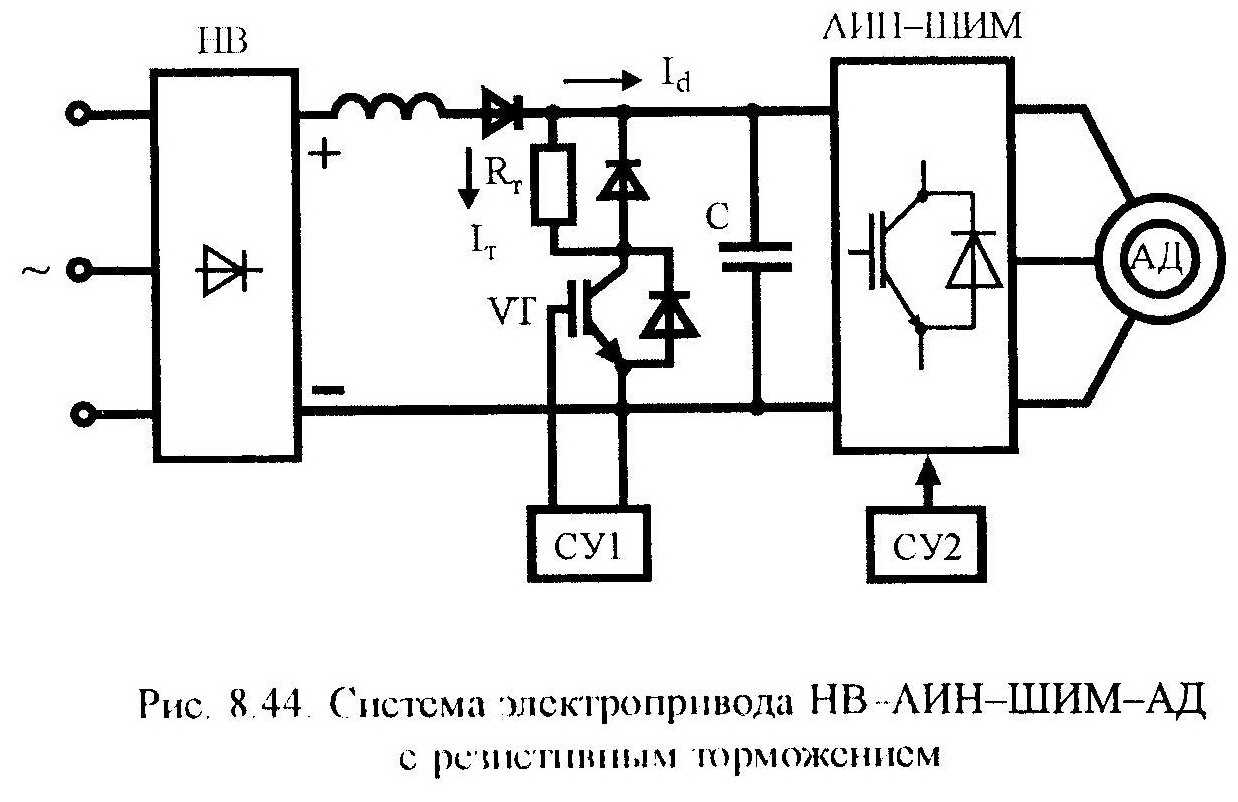
Р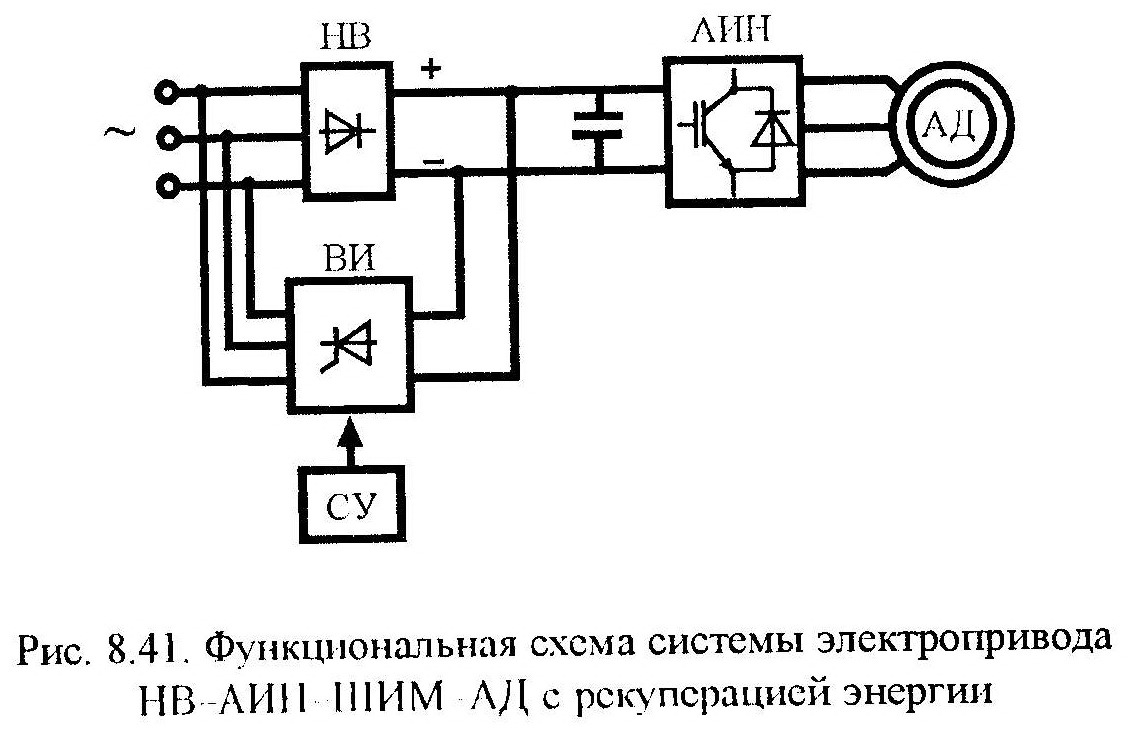 езистивное
торможение.При
торможении кинетическая энергия,
освобождаемая инерционными массами
электропривода при снижении скорости,
рассеивается в виде потерь в АД, АИН и
тормозном сопротивлении Rт:
езистивное
торможение.При
торможении кинетическая энергия,
освобождаемая инерционными массами
электропривода при снижении скорости,
рассеивается в виде потерь в АД, АИН и
тормозном сопротивлении Rт:
Изменение
эл энергии в конденсаторе С фильтра
выпрямителя:
![]()
Коэффициент мощности kм входной цепи НВ-АИН определяется выражением
kм=kIcosφ(1)=kI ,
где
![]()
Если не
учитывать индуктивности на входе НВ и
принять идеально сглаженный выпрямленный
ток Id,
то для трехфазной мостовой схемы
выпрямления имеем следующие соотношения:
![]()