

33 Влияние активного сопротивления r1 на свойства и характеристики ад при частотном управлении
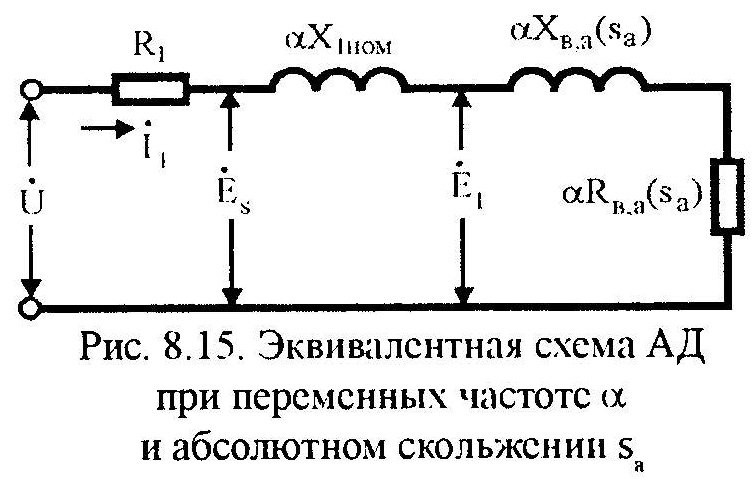
 При
этом активное Rв
(sа)
и реактивное Xв
(sа)
сопротивления АД, являющиеся функциями
абсолютного скольжения sа,пропорциональны
относительной частоте :
При
этом активное Rв
(sа)
и реактивное Xв
(sа)
сопротивления АД, являющиеся функциями
абсолютного скольжения sа,пропорциональны
относительной частоте :
![]() (8.119)
(8.119)
где
 (8.120)
(8.120)
 (8.121)
(8.121)
![]() (8.122)
(8.122)
где
![]() (8.123)
(8.123)
![]()

Если Мк, = Мк,ном , то можно найти закон частотного управления :
Однако
при реализации этого закона частотного
управления следует принимать во внимание
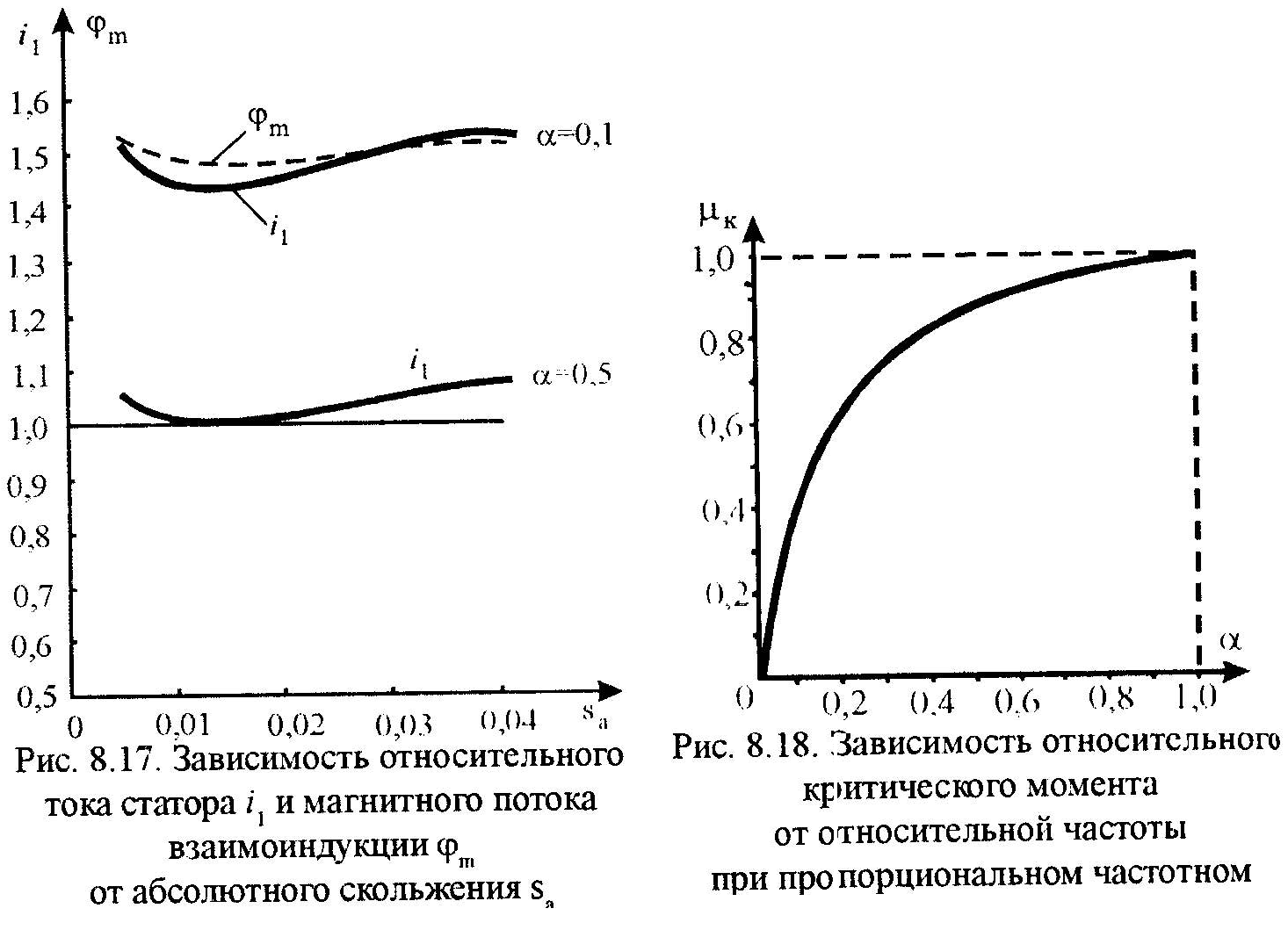
величину тока статора
![]()
и
магнитного потока взаимоиндукции
![]()
где
![]() (8.131)
(8.131)
![]() (8.132)
(8.132)
![]()
![]() (8.134)
(8.134)
Использование пропорционального закона = частотного управления для реального АД приводит к тому , что критический момент
двигателя уменьшается с уменьшением частоты (Рис.8.18) .
Можно видеть также , что жесткость линейной части механической характеристики АД
 (8.136)
(8.136)
с уменьшением частоты снижается . Это можно сказать также и относительно магнитного потока взаимоиндукции
![]() (8.137)
(8.137)
34 Замкнутые системы скалярногочастотного управления ад.
Из замкнутых систем скалярного частотного управления асинхронными двигателями наибольшее распространение получили системы стабилизации потокосцепления ( статора 1 , взаимоиндукции m , ротора 2 ) и абсолютного скольжения . Каждый из этих законов частотного управления характеризует электромеханические свойства и энергетические показатели АД .
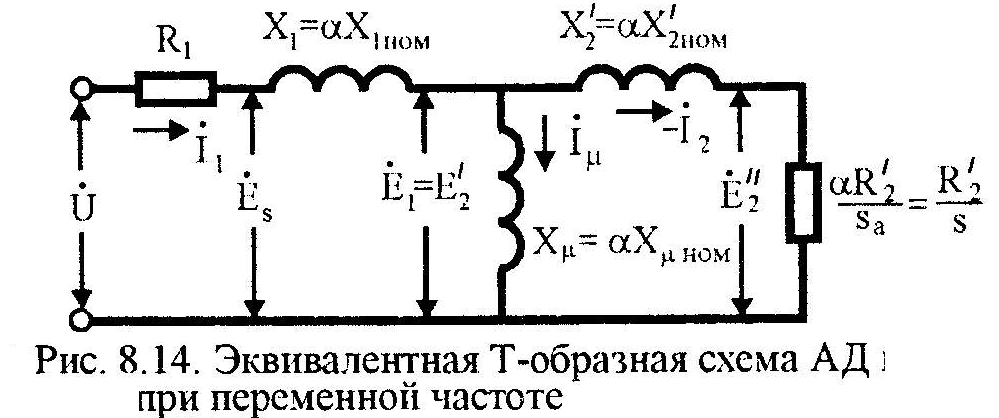
Для выяснения основных соотношений при частотном управлении со стабилизацией потокосцепления рассмотрим векторную диаграмму АД (Рис.8.20) , построенную в соответствии с эквивалентной Т-образной схемой асинхронного двигателя при переменной частоте (см .Рис.8.14) , где для упрощения записи обозначены :
X1 = X1ном ; X/2 = X/2ном ; X = X.ном (8.138)
Для синусоидальных величин переменного тока известно соотношение между действующими значениями ЭДС Е , потокосцепления и угловой частотой 1 :
Е = 1 (8.139)
В соответствии с законом электромагнитной индукции для синусоидальных переменных получаем , что векторы ЭДС и соответствующие им потокосцепления на Рис.8.20 ортогональны , т.е.
![]()
![]() (8.140)
(8.140)
где
![]() соответственно
векторы ЭДС , индуктированных изменением
векторов потокосцеплений статора
соответственно
векторы ЭДС , индуктированных изменением
векторов потокосцеплений статора
![]() взаимоиндукции
взаимоиндукции
![]() и
ротора
и
ротора
![]() .
.
Векторы потокосцеплений связаны между собой соотношениями :
![]() (8.141)
(8.141)
![]() (8.142)
(8.142)
где
![]() (8.143)
(8.143)
![]() -
векторы потокосцеплений рассеяния
статора и ротора ,
-
векторы потокосцеплений рассеяния
статора и ротора ,
![]() -
индуктивности рассеяния фаз статора и
ротора .
-
индуктивности рассеяния фаз статора и
ротора .
Рассмотрим свойства и характеристики АД при разных законах стабилизации потокосцеплений .
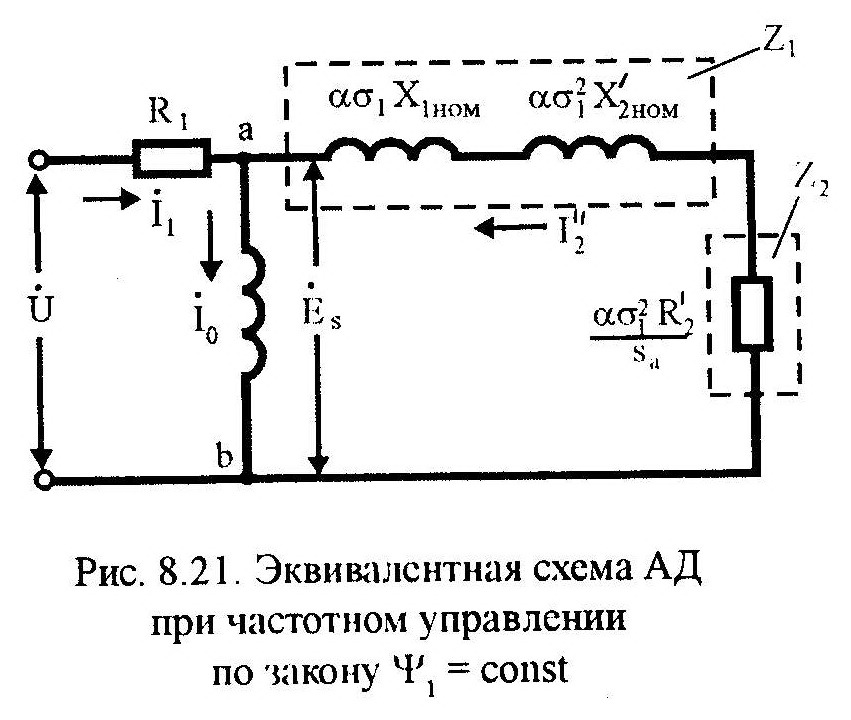
35 СКАЛЯРНОЕ ЧАСТОТНОЕ УПРАВЛЕНИЕ АД ПО ЗАКОНУ 1= const.
На
основании
![]() и
и
![]() можно записать пропорцию :
можно записать пропорцию :
![]() (8.144)
(8.144)
из
которой определяется действующее
значение ЭДС статора :
![]() (8.145)
(8.145)
п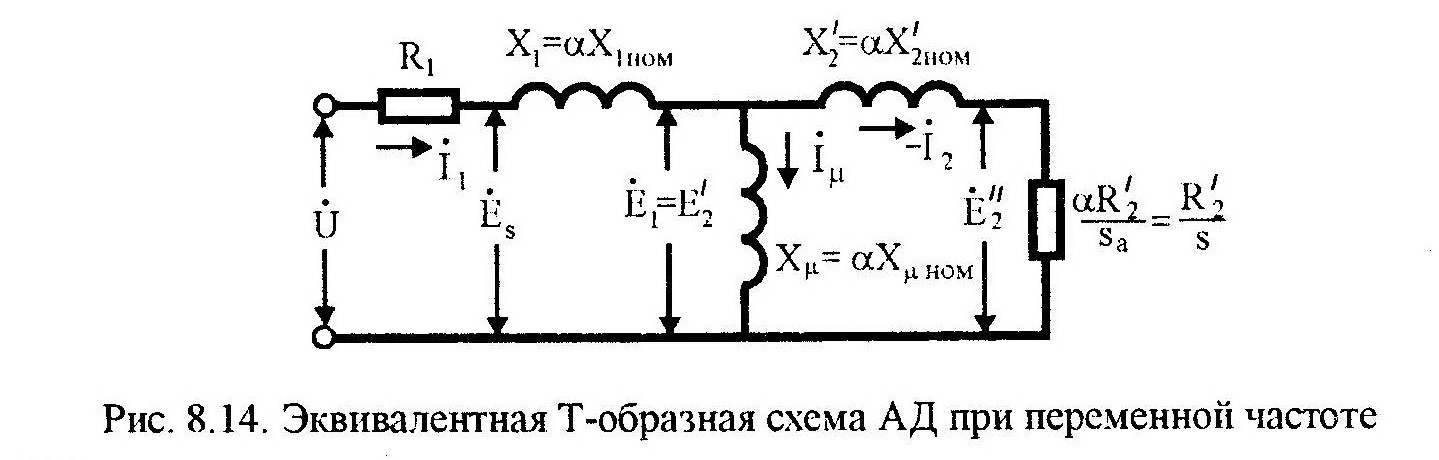
 ри
частотном управлении по закону 1=
const.
ри
частотном управлении по закону 1=
const.
![]() (8.146)
(8.146)
где
![]() (8.147)
(8.147)
Ks – коэффициент магнитной связи статора .Из Рис.8.21 и принятых обозначений (8.146) следует , что приведенный ток ротора :
 (8.148)
(8.148)
 (8.149)
где действующее значение номинальной
ЭДС статора Es.ном
:
(8.149)
где действующее значение номинальной
ЭДС статора Es.ном
:
![]() (8.150)
(8.150)
Электромагнитный
момент трехфазного АД можно записать
в виде
![]() (8.151)
(8.151)
 (8.152)
(8.152)
![]()
![]()
![]()
абсолютное
критическое скольжение![]() (8.154)
(8.154)
Определим
ток
![]() , соответствующий абсолютному критическому
скольжению:
, соответствующий абсолютному критическому
скольжению:
![]()
и
электромагнитную мощность :![]()