

31 (2) Регулирование скорости ад в системе ирс-ад
Р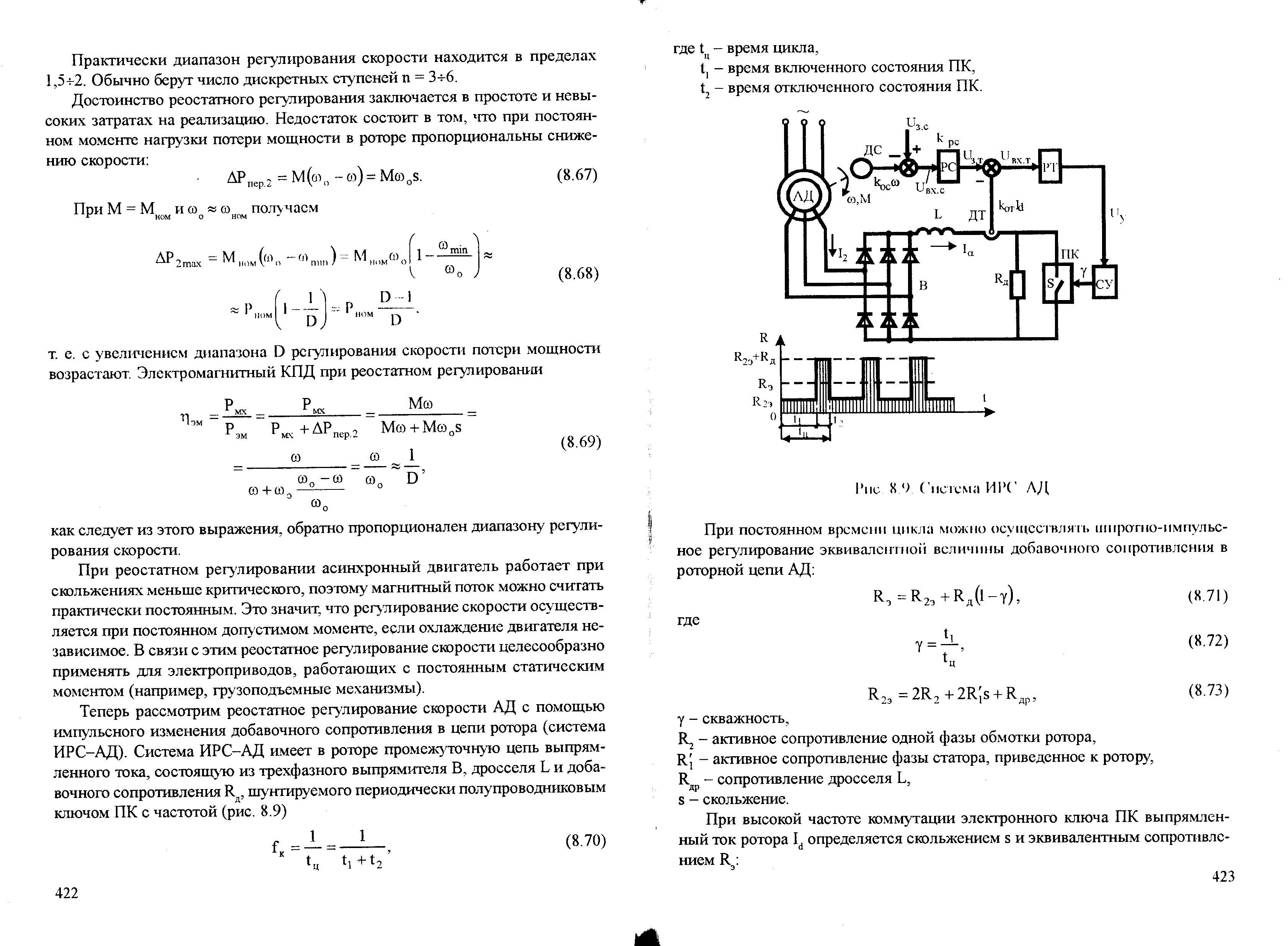 ассмотрим
реостатное регулирование скорости АД
с помощью импульсного изменения
добавочного сопротивления в цепи ротора
(система ИРС – АД). Система ИРС – АД
имеет в роторе промежуточную цепь
выпрямленного тока, состоящую из
трехфазного выпрямителя В, дросселя L
и добавочного сопротивления Rд
, шунтируемого периодически полупроводниковым
ключом ПК с частотой.
ассмотрим
реостатное регулирование скорости АД
с помощью импульсного изменения
добавочного сопротивления в цепи ротора
(система ИРС – АД). Система ИРС – АД
имеет в роторе промежуточную цепь
выпрямленного тока, состоящую из
трехфазного выпрямителя В, дросселя L
и добавочного сопротивления Rд
, шунтируемого периодически полупроводниковым
ключом ПК с частотой.
![]() (8.69)
(8.69)
где tц – время цикла, t1 – время включенного состояния ПК,
t2 – время отключенного состояния ПК.
При постоянном времени цикла можно осуществлять широтно-импульсное регулирование эквивалентной величины добавочного сопротивления в роторной цепи АД:
![]() (8.70)
/ где
(8.70)
/ где
![]() (8.71) /
(8.71) /
![]() (8.72)
(8.72)
скважность,
R2
– активное сопротивление одной фазы
обмотки ротора,
![]()
активное сопротивление фазы статора,
приведенное к ротору, Rдр
– сопротивление дросселя L,
s
– скольжение.
активное сопротивление фазы статора,
приведенное к ротору, Rдр
– сопротивление дросселя L,
s
– скольжение.
При
высокой частоте коммутации электронного
ключа ПК выпрямленный ток ротора Id
определяется скольжением s
и эквивалентным сопротивлением Rэ
:
![]() (8.73)
(8.73)
где
Еdo
– выпрямленная ЭДС ротора при s=1
без учета угла коммутации (Edo=1,35U2л
, U2л
– линейное напряжение на кольцах АД
при I2=0)
, Uщ
падение напряжения на щетках, Uв
падение напряжения на вентиле,![]() (8.74) Х2
– индуктивное сопротивление фазы
ротора,
(8.74) Х2
– индуктивное сопротивление фазы
ротора,
![]() приведенное к ротору индуктивное
сопротивление фазы статора.
приведенное к ротору индуктивное
сопротивление фазы статора.
Система автоматического регулирования скорости включает задающее напряжение Uз.с , датчик скорости ДС, формирующий напряжение обратной связи, пропорциональный регулятор скорости РС, импульсный регулятор тока РТ, систему управления СУ силовым полупроводниковым ключом ПК. В пределах линейной части механической характеристики электромагнитный момент АД пропорционален выпрямленному току ротора Id :
![]() (8.75) где
(8.75) где
![]() (8.76)
(8.76)
Если
пренебречь погрешностью регулятора
тока РТ, то можно принять Id=Id,з
, где Id,з
– заданное значение выпрямленного тока
ротора, которое можно найти как
![]() (8.77)
(8.77)
где Uз,т – заданное напряжение, которое определяет величину Id,з при коэффициенте обратной связи по току Кот .
На основании приведенной на рис.8.9 схемы системы ирс – ад имеем (8.78)
где Крс – коэффициент усиления регулятора скорости, Кос – коэффициент обратной связи по скорости.
Подставляя (8.78) в (8.77), а затем в (8.75), получим
![]() (8.79)
откуда
(8.79)
откуда
![]() (8.80)
(8.80)
Обозначим (8.81) (8.82)
т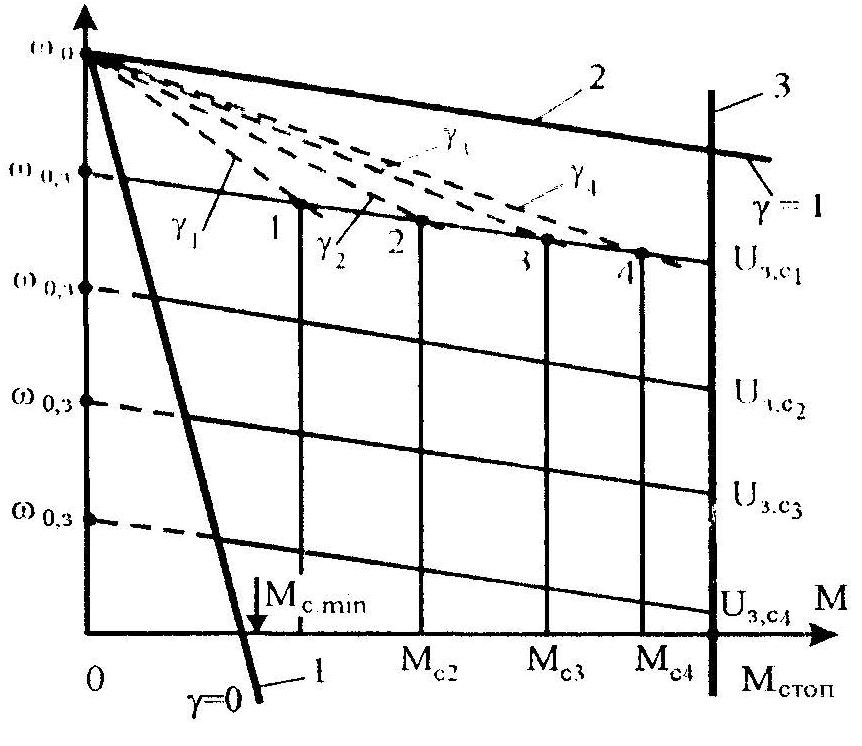 огда
получаем окончательное выражение
механической характеристики двигателя
в системе ИРС – АД:
огда
получаем окончательное выражение
механической характеристики двигателя
в системе ИРС – АД:
![]() (8.83)
(8.83)
где о,з скорость идеального холостого хода АД в замкнутой системе (фиктивная величина), з,с модуль жесткости механической характеристики в замкнутой системе.
Таким
образом, в пределах действия замкнутой
системы механические характеристики
АД являются линейными (рис.8.10). Работа
АД в системе ИРС – АД ограничивается
тремя прямыми: 1 – соответствующей =0;
2 – соответствующей =1
и 3 – соответствующей максимальному
моменту Мстоп
, определяемому предельным значением
выпрямленного тока ротора Id,з
. Выбором коэффициентов Кос
, Крс
, Кот
можно получить необходимый модуль
жесткости з,с
механической характеристики в замкнутой
системе. Добавочное сопротивление R2д
в фазе ротора следует выбирать таким,
чтобы пусковой момент на характеристике
1 был меньше или равен минимальному
статическому моменту Мс.min
электродвигателя. Это условие можно
записать в виде
![]() (8.84)/
где
(8.84)/
где
![]() (8.85) /
(8.85) /![]() (8.86)
(8.86)
Мк – критический момент АД, sк.max , sке – критические скольжения АД соответственно для характеристики 1 и для естественной характеристики, R2,0 – активное сопротивление одной фазы обмотки ротора.
На основании (8.84) – (8.86) определяем добавочное сопротивление R2д в фазе ротора
![]() (8.87)
/
(8.87)
/
![]() (8.88)
(8.88) (8.89)
(8.89)