

30 Способы регулирования скорости электродвигателей.
С
энергетической точки зрения регулирование
скорости или момента электродвигателя
означает изменение механической
мощности![]()
Как следует из анализа энергетических диаграмм электродвигателей, полная механическая мощность Рмх равна разности электромагнитной мощности Рэм и мощности потерь в якоре (роторе):
![]()
Это выражение показывает возможные способы регулирования скорости электродвигателей. При неизменных параметрах источника питания электродвигателя (о=const) регулирование скорости при М=const можно осуществить за счет изменения потерь мощности Рпер в силовой цепи. Если источник питания управляемый, то с его помощью можно регулировать подвод электромагнитной мощности Рэм к электродвигателю (Рэм=Мо ; о=var) и реализовать регулирование скорости для М=const при Рпер=const.
В связи с этим все способы регулирования скорости электроприводов постоянного и переменного тока принципиально можно разделить на две группы.
Первая группа включает способы регулирования скорости, при которых скорость идеального холостого хода о электродвигателя остается постоянной. Для электроприводов постоянного тока с ДПТ НВ это означает неизменную величину напряжения источника питания и постоянный магнитный поток двигателя, а для асинхронных электроприводов без использования энергии скольжения – неизменную частоту питающего статор напряжения. Эта группа способов регулирования скорости получила название “параметрического” регулирования. При постоянном моменте потери мощности в силовой цепи пропорциональны скольжению
![]() поэтому
скорость регулируется за счет изменения
скольжения
поэтому
скорость регулируется за счет изменения
скольжения![]()
Хотя двигатели постоянного тока последовательного возбуждения (ДПТ ПВ) не имеют конечного значения скорости идеального холостого хода, реостатное регулирование ДПТ НВ следует отнести к первой группе, как параметрический способ регулирования за счет потерь.
Вторая группа охватывает способы, где скорость идеального холостого хода о электродвигателя изменяется с помощью управляющего воздействия. В электроприводах постоянного тока с ДПТ НВ изменяется или напряжение источника питания при неизменном магнитном потоке двигателя или магнитный поток двигателя при неизменном напряжении на якоре (обычно номинальном).Из асинхронных электроприводов ко второй группе относятся: электроприводы с полюсно-переключаемыми (многоскоростными) АД, частотно-регулируемые электроприводы и каскадные схемы. В способах регулирования скорости второй группы потери мощности в силовой цепи при данном моменте пропорциональны отклонению скорости ротора от скорости идеального холостого хода о электродвигателя. Поэтому эти способы еще называют “энергетическими”. Ко второй группе следует отнести и регулирование скорости электроприводов с ДПТ ПВ при изменении напряжения источника питания, поскольку при этом изменяется величина мощности, передаваемой от источника к электродвигателю, т.е. данный способ является энергетическим.
31 Регулирование скорости ад в системах рн-ад
Полупроводниковые регуляторы напряжения при регулировании величины напряжения искажают синусоидальную форму кривой. В результате на выходе регулятора напряжения, кроме первой, присутствуют и высшие гармоники. Но электромагнитный момент АД определяется первой гармоникой напряжения. Влияние высших гармоник невелико и им можно пренебречь при оценке электромеханических свойств электропривода в установившемся режиме
В дальнейшем рассмотрении системы РН – АД мы будем учитывать линеаризованные характеристики всех элементов, составляющих систему электропривода.
Ч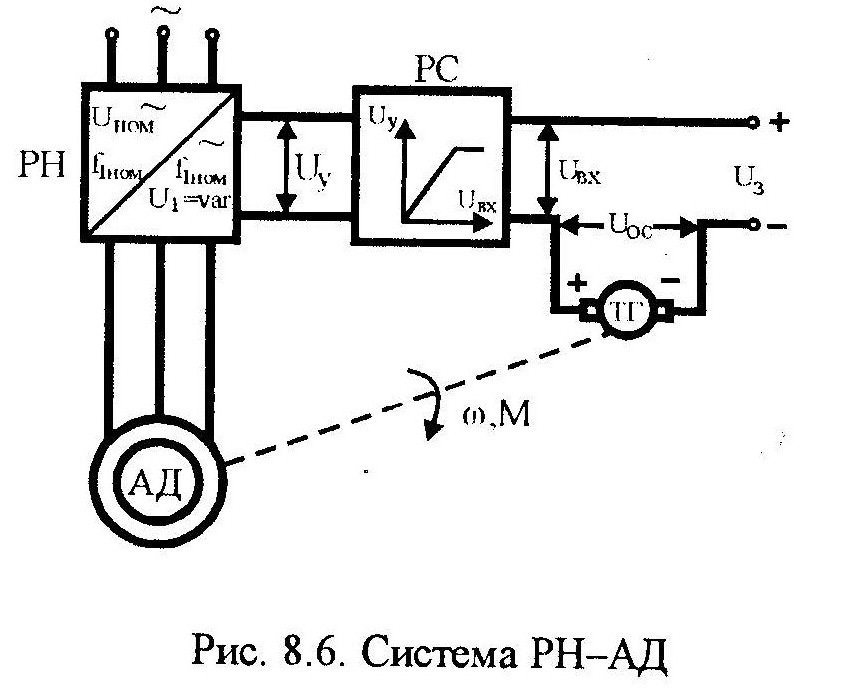 то
касается регулирования скорости АД при
уменьшении напряжения питания U1
и постоянной частоте f1=f1ном
, то вследствие неудовлетворительных
механических характеристик АД в
разомкнутых системах применяются,
главным образом, замкнутые системы РН
– АД с отрицательной обратной связью
по скорости (рис.8.6). Напряжение, поступающее
на обмотку статора АД, можно записать
в виде
то
касается регулирования скорости АД при
уменьшении напряжения питания U1
и постоянной частоте f1=f1ном
, то вследствие неудовлетворительных
механических характеристик АД в
разомкнутых системах применяются,
главным образом, замкнутые системы РН
– АД с отрицательной обратной связью
по скорости (рис.8.6). Напряжение, поступающее
на обмотку статора АД, можно записать
в виде
![]() (8.36)
(8.36)
где Крн , Крс – коэффициенты усиления регулятора напряжения РН и регулятора скорости РС,
Кос – коэффициент обратной связи по скорости (крутизна характеристике тахогенератора ТГ), Uз – задающее напряжение.
Электромагнитный момент пропорционален квадрату напряжения:
 (8.37)
(8.37)
где Ме(s) – момент АД на естественной механической характеристике при данном скольжении s. При работе АД в системе РН – АД с Uз=const можно линеаризовать зависимость момента от напряжения, приняв
![]() (8.38)
где
(8.38)
где
![]() (8.39)
(8.39)
Определяем
U1
из (8.38) и подставляем в (8.36):
![]() (8.40)
(8.40)
откуда
получаем уравнение линеаризованной
механической характеристики АД в
замкнутой по скорости системе РН – АД:
![]() (8.41)
(8.41)