

27 Определение допустимого числа включений асинхронного двигателя с короткозамкнутым ротором.
В
установившемся режиме двигатель отдает
в окружающую среду мощность потерь
Рном
, а в период пауз
оРном
. В период пуска и торможения в окружающую
среду рассеивается мощность Рном
. Чтобы асинхронный короткозамкнутый
двигатель не перегревался необходимо,
чтобы выделяемые за время цикла потери
энергии были равны энергии, отдаваемой
в окружающую среду. Это позволяет
составить уравнения теплового равновесия
за цикл:
![]()
где Ап+Ат потери энергии в двигателе за время пуска и торможения;
А=Рtу потери энергии за время установившегося движения;
tп ,tт – время пуска и торможения; tо – время паузы; tу – время установившегося движения.
![]()
Время
установившегося движения
![]()
Время
паузы
![]()
![]()
Обозначим
![]()
тогда
преобразуется к виду
![]()
из
которого находим время цикла
![]()
Величина
![]()
поэтому
ей часто пренебрегают, принимая а=0.
Время цикла tц
и число включений в час Z
связаны соотношением
![]()
Определяем
допустимое число включений в час
асинхронного двигателя с короткозамкнутым
ротором
![]()
При
номинальной нагрузке![]()
![]()

Возможно следующие случаи:
а)
![]() ,
тогда
,
тогда
![]()
независимо от продолжительности включения ;
б)
![]() ,
,
тогда с увеличением число включений Z тоже увеличивается;
в)
![]() ,
,
в этом случае с ростом число включений Z уменьшается.
28 Выбор мощности электродвигателей при ударной нагрузке электропривода.
К электроприводам с резко переменной (ударной) нагрузкой относятся приводы молотов, прессов, прокатных станов, ножниц, имеющих нагрузочную диаграмму, близкую к режиму S6 (рис.7.24).
М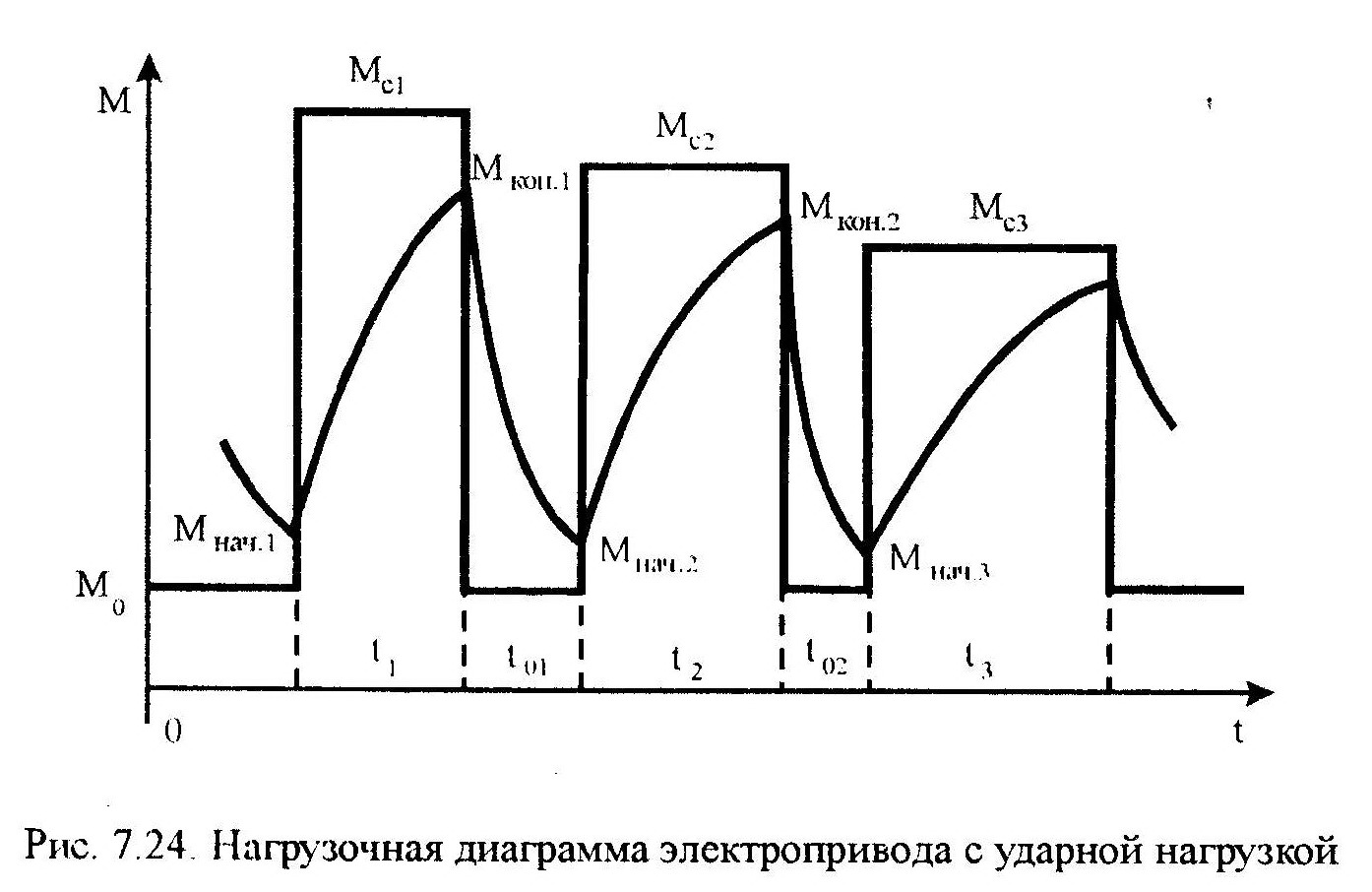 омент
электродвигателя на i-м
участке приложения нагрузки
омент
электродвигателя на i-м
участке приложения нагрузки
![]()
где Мci , Мнач.i статический и начальный момент на i-м участке нагрузки длительностью ti ,
Тм электромеханическая постоянная времени электропривода.
На
j-м
участке пауз момент электродвигателя
определяется выражением
![]()
где Мо , Мнач.j момент холостого хода и начальный момент на j-м участке пауз длительностью tj .
Вследствие непрерывности кривой момента имеем
![]()
При
выборе электродвигателя необходимо
обеспечить, чтобы в конце наиболее
тяжелого участка максимальный момент
двигателя не превышал допустимого
mМном
. Наиболее тяжелый участок нагрузочной
диаграммы можно определить по максимуму
избыточной мощности
![]()
Для
выбранного таким образом наиболее
тяжелого участка нагрузки принимаем
допущение, что Мнач.i
=Мо
. В конце
наиболее тяжелого участка будем иметь
уравнение для электромагнитного момента:
![]()
Находим электромеханическую постоянную времени электропривода Тм:
 где
sном,х
скольжение на искусственной характеристике
при номинальном моменте Мном,
о
угловая скорость идеального холостого
хода электродвигателя,
где
sном,х
скольжение на искусственной характеристике
при номинальном моменте Мном,
о
угловая скорость идеального холостого
хода электродвигателя,

![]()
где Jд , Jм соответственно момент инерции ротора электродвигателя с передаточным механизмом и момент инерции механизма, j – передаточное число.
.Регулирование координат электропривода.
Для управления движ-ем необходимо регулировать переменныеЭП, которые в пространстве состояний называются фазовыми координатами. Поэтому говорят о регулировании координат электропривода. Наиболее характерными регулируемыми координатами Э.П
являются скорость, момент(ток) и положение.
Известны два способа автоматического регулирования координат:
1)Регулирование по отклонению координаты от заданного значения с помощью отрицательной обратной связи по регулируемой величине
2)Регулирование по возмущению, где с помощью положительной обратной связи компенсируется влияние возмущения на регулируемую величину
Иногда применяется комбинированное управление.
Для оценки свойств регулируемого электропривода вводится ряд показателей: точность, диапазон, плавность, динамические показатели, технико-экономич. показатели, допустимая нагрузка.
Т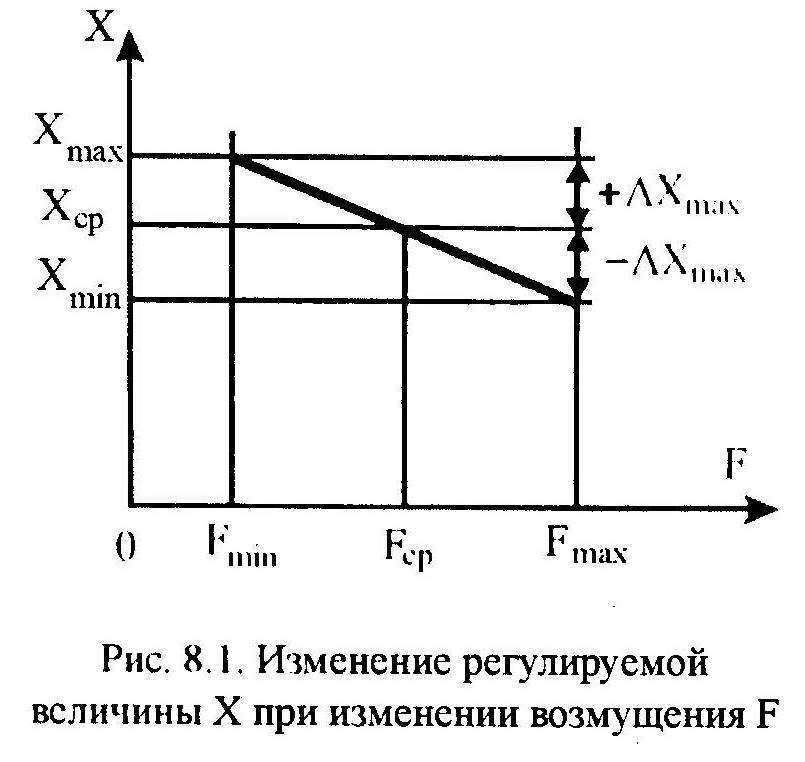 очность
регулирования оценивается отношением
наибольшего отклонения Хmax
регулируемой величины к ее среднему
значению Хср
при данном изменении возмущения F
(рис.8.1).
очность
регулирования оценивается отношением
наибольшего отклонения Хmax
регулируемой величины к ее среднему
значению Хср
при данном изменении возмущения F
(рис.8.1).
![]()
Для замкнутых систем регулирования точность оценивается как отношение абсолютной величины разности между заданным Хз и текущим Х значениями регулируемой величины к ее заданному значению:
![]()
 В
разомкнутых и замкнутых системах
точность регулирования не должна быть
ниже допустимого значения, т.е.
В
разомкнутых и замкнутых системах
точность регулирования не должна быть
ниже допустимого значения, т.е.
![]()
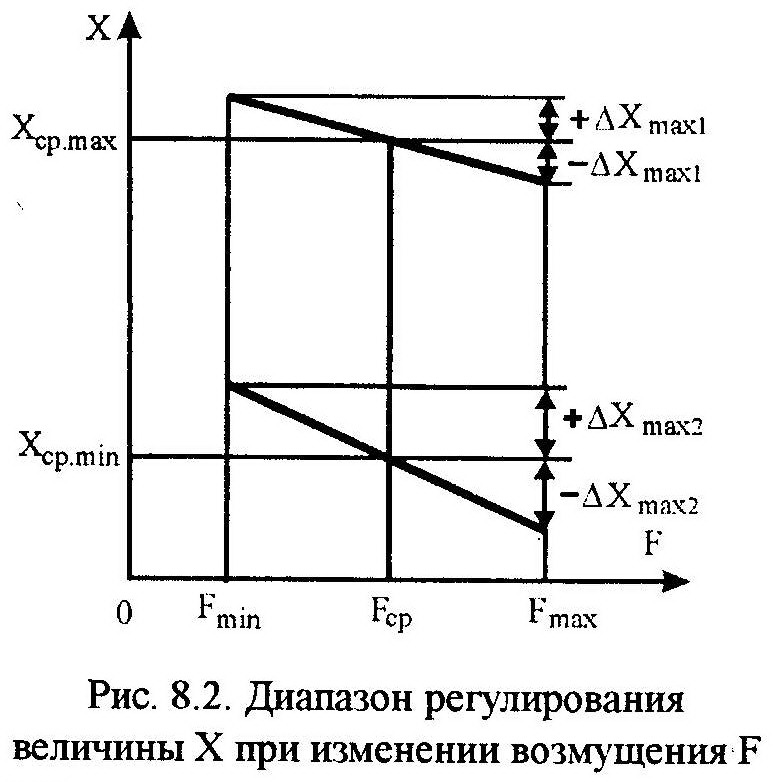
Диапазон
регулирования D
определяется отношением наибольшего
Хср.max
и наименьшего Хср.min
средних значений регулируемой величины:![]()
в данном диапазоне возмущений (рис.8.2). Верхний предел регулируемой переменной Х ограничивается допустимыми значениями, а нижний – чаще всего, допустимой точностью регулирования.
Плавность
регулирования характеризуется числом
дискретных значений регулируемой
величины в заданном диапазоне и
оценивается коэффициентом плавности
![]()
Динамические показатели:
а) быстродействие определяет быстроту реакцию электропривода на управляющее воздействие. Быстродействие оценивается по времени пуска и торможении электропривода;
б) время регулирования tр – это время, за которое регулируемая величина Х первый раз достигает установившегося значения Хуст (характерные временные интервалы: tр , tmax , tп.п.) – рис.8.3. Другие временные показатели: время первого максимума tmax , и время переходного процесса tп.п. ;
в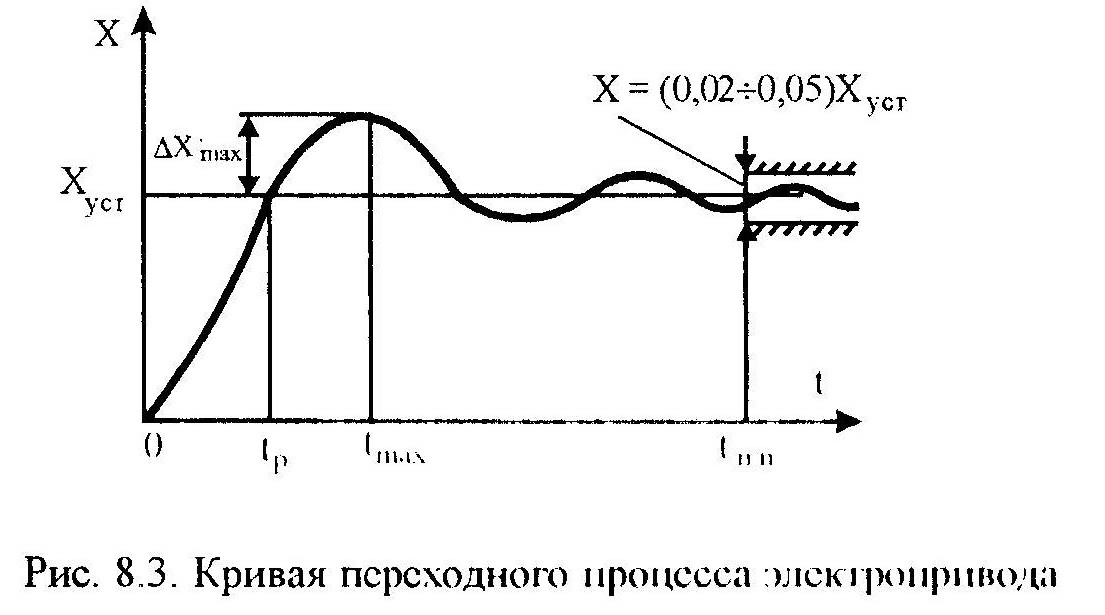 )
перерегулирование
представляет собой динамическую ошибку
и определяется как относительная
величина максимального отклонения
)
перерегулирование
представляет собой динамическую ошибку
и определяется как относительная
величина максимального отклонения
![]()
г) колебательность оценивается логарифмическим декрементом затухания
![]() и
числом колебаний N
за время переходного процесса
и
числом колебаний N
за время переходного процесса![]()
Технико-экономичпоказ. Определяются капитальными затратами на приобретение эл. оборудования для регулир. ЭП и эксплуатационными расходами на эксплуатацию ЭП, а так же влиянием регулируемого ЭП на питающую сеть и окружающую среду.
Допустимая нагрузка электропривода при регулировании скорости определяется наибольшей величиной момента, который двигатель способен развивать длительно при работе на любой искусственной характеристике, не перегреваясь. При работе двигателя на естественной характеристике допустимой нагрузкой является номинальный момент. Если принять допущение, что нагрев двигателя определяется только переменными потерями, то при независимом охлаждении допустимым током на всех характеристиках будет номинальный ток. Так как в электродвигателе электромагнитный момент пропорционален произведению тока на магнитный поток, то допустимый момент будет определятся в зависимости от того, как изменяется магнитный поток при изменении скорости.