

23 Выбор мощности электродвигателей для длительного режима работы
Пуски и остановки редкие Ном. мощность ЭД опр. на осн. статической мощн. мех-ма:
К![]() зап=(1,05-1,1)
зап=(1,05-1,1)
КПД мех передачи
Выбранный ЭД для темп. окр. среды +40С.
Допустимое
значение темп. перегрева:![]()
Допустимый коэф. загрузки ЭД:
![]()
![]()
а-отнош. пост. и переем потерь мощности;тета-темп. окр.среды
Граничная внешная температура, при кот. ЭД работает только в холостую:
![]()
![]()
Температура перегрева обмотки в конце пуска:
![]()
дельта А-потери энергии за время пуска на нагрев обм.
т- масса обмотки
Суд-удельная теплоемкость материала
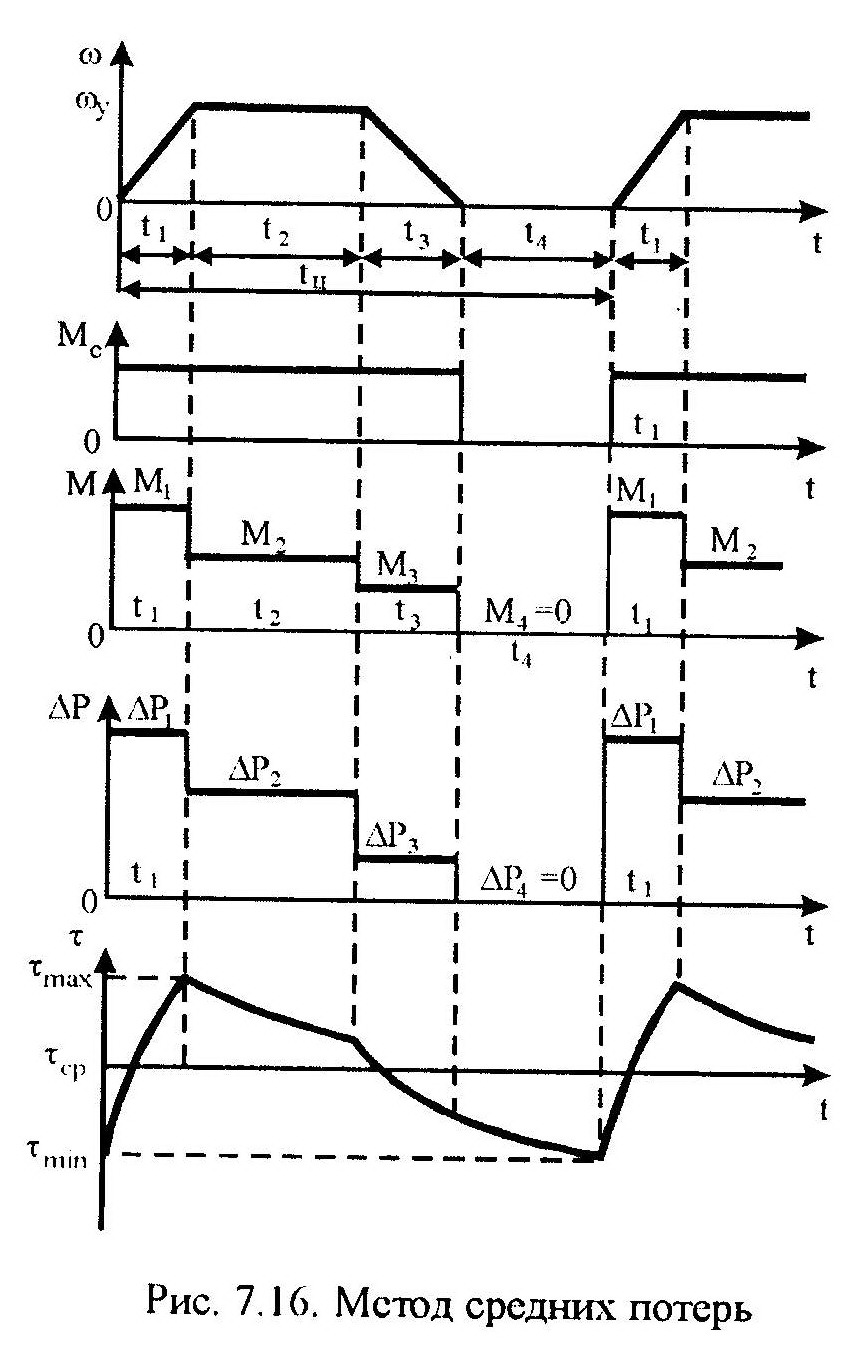
24 Выбор мощности электродвигателей для продолжительного режима работы с переменной нагрузкой методом средних потерь.
Примем допущение о цикличности нагрузочной диаграммы электропривода, которая состоит из отдельных участков с разной величиной нагрузки. Рассмотрим установившийся в тепловом отношении режим, когда температура перегрева в начале и в конце цикла одинакова, а на протяжении цикла изменяется относительно среднего значения (Рис.7.16).
 При
этих условиях выделяемое в электродвигателе
за время цикла tц
количества тепла отдается в окружающую
среду, т.е.
При
этих условиях выделяемое в электродвигателе
за время цикла tц
количества тепла отдается в окружающую
среду, т.е.
 ,
(7.100)
,
(7.100)
где
![]() ,
(7.101)
,
(7.101)
А, Rт – теплоотдача и тепловое сопротивление.
Разделим на tц обе части равенства (7.100):
 ,
(7.102)
,
(7.102)
Отсюда
следует, что при постоянной величине А
теплоотдачи в окружающую среду средние
потери мощности
![]() пропорциональны средней температуре
перегрева
пропорциональны средней температуре
перегрева
![]() ,
где
,
где
 ,
(7.103)
,
(7.103)
Для номинального режима можно записать аналогичное равенство , (7.104)
где
![]()
![]() ,
(7.105)
,
(7.105)
![]() - номинальные мощность и КПД электродвигателя.
- номинальные мощность и КПД электродвигателя.
На
основании (7.102) – (7.104) формулируется
метод средних потерь: если
средние за цикл потери мощности не
превышают номинальные потери, т.е.![]() ,
(7.106)
,
(7.106)
то средняя температура перегрева не будет превышать допустимую, т.е.
![]() ,
(7.107)
,
(7.107)
Чтобы
действительная температура не отличалась
значительно от средней, необходимо
соблюдать условие ![]() ,
(7.108)
,
(7.108)
где Тн – постоянная времени нагрева.
В
общем случае средние потери мощности
в электродвигателе за цикл рассчитывают
по выражению:
 ,
(7.109) где
,
(7.109) где
![]() ,
(7.110)
,
(7.110)
![]() ,
(7.111)
,
(7.111)
![]() ,
(7.112)
,
(7.112)
Мк,
Рк
– момент и мощность двигателя на к-м
участке с установившейся угловой
скоростью
![]() ;
;
![]() -
КПД электродвигателя при нагрузке Мк
и скорости
;
-
КПД электродвигателя при нагрузке Мк
и скорости
;
q – число участков в цикле с установившейся скоростью двигателя;
r
– число пуско-тормозных участков в
цикле, когда
![]() ;
;
- коэффициент, учитывающий охлаждение
самовентилируемого двигателя при
![]() и определяемый по (7.47);
и определяемый по (7.47);
n
– общее число участков в цикле:
![]() ,
(7.113)
,
(7.113)
![]() - потери мощности в переходном процессе
электродвигателя на j-м
участке в момент времени t;
- потери мощности в переходном процессе
электродвигателя на j-м
участке в момент времени t;
ti
– продолжительность i-го
участка цикла, на котором угловая
скорость
![]() принимается постоянной или равной
среднему значению.
принимается постоянной или равной
среднему значению.
Если
в переходном процессе электропривода
скорость двигателя изменяется от нуля
до установившегося значения, равного
примерно номинальному, или наоборот,
то коэффициент охлаждения рассчитывается
по средней скорости
![]() ,
(7.114)
,
(7.114)
где
![]() определяется по (7.48) – см. табл.7.2.
определяется по (7.48) – см. табл.7.2.
КПД
электродвигателя
при частичной загрузке
![]() в зависимости от способа регулирования
скорости определяется в соответствии
с положениями шестой главы.
в зависимости от способа регулирования
скорости определяется в соответствии
с положениями шестой главы.
Проверка нагрева электродвигателя методом средних потерь осуществляется по (7.106), где средние потери мощности вычисляются по (7.109).
Для пользования методом средних потерь необходимо иметь зависимость КПД электродвигателя от коэффициента загрузки при данной скорости, что в свою очередь требует расчета коэффициента постоянных потерь а. Кроме того, необходимо рассчитывать постоянные и переменные потери мощности в переходных процессах электропривода, что связано с необходимостью знания всех параметров электродвигателя.
Поэтому, несмотря на свою универсальность, метод средних потерь имеет ограниченное применение.
ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПРОДОЛЖИТЕЛЬНОГО РЕЖИМА РАБОТЫ С ПЕРЕМЕННОЙ НАГРУЗКОЙ МЕТОДОМ ЭКВИВАЛЕНТНОГО ТОКА
Метод
основан на замене действительной
переменной величины тока мнимой
постоянной величиной тока, вызывающей
такой же нагрев двигателя, что и реальный
переменный ток. Потери мощности в
двигателе
представляют в виде суммы постоянных
![]() и переменных
и переменных
![]() потерь, т.е.
потерь, т.е.
![]() ,
(7.115)
,
(7.115)
где с – коэффициент, который учитывает число обмоток в двигателе, по которым протекает ток I, R – сопротивление одной обмотки.
При циклической нагрузке средние потери мощности выражаются (7.109).
, (7.109)
Выразим потери на каждом участке графика нагрузки через постоянные и переменные, а переменные потери в средней мощности – через эквивалентный ток. В результате получим
 ,
(7.116)
,
(7.116)
По
определению постоянные потери не зависят
от нагрузки, поэтому их можно сократить
в левой и правой части равенства (7.116),
приняв для них
![]() .
Тогда остается выражение
.
Тогда остается выражение
 ,
(7.117)
,
(7.117)
Примем, что сопротивление R обмоток двигателя не зависит от тока (фактически такая зависимость имеется, так как сопротивление зависит от температуры, а температура зависит от тока). Это допущение позволяет сократить левую и правую часть выражения (7.117) на коэффициент cR. В результате получаем формулу для вычисления эквивалентного тока двигателя
 ,
(7.118)
,
(7.118)