

22 Нагрузочные диаграммы механизма и электропривода. Выбор мощности эд по нагрузочным диаграммам
Исходные
данные для выбора электродвигателей
обычно представляются в виде нагрузочных
диаграмм рабочего механизма, под которым
понимают зависимость момента сопротивления
механизма Мм
или мощности Рм
от времени t,
т.е. Мм(t)
или Рм(t).
Вместе с нагрузочной диаграммой механизма
дается или рассчитывается скоростная
диаграмма
![]() или
или
![]() .
Иногда момент механизма Мм
зависит от пути (угла поворота механизма
.
Иногда момент механизма Мм
зависит от пути (угла поворота механизма
![]() ).
В этом случае при известной скорости
механизма можно перестроить заданный
график
).
В этом случае при известной скорости
механизма можно перестроить заданный
график
![]() ,
получив в виде Мм(t).
,
получив в виде Мм(t).
Нагрузочные диаграммы механизма разделяют на детерминированные и статистические. Детерминированные диаграммы когда отсутствует влияние случайных факторов. Однако имеются механизмы, нагрузка которых испытывает значительные колебания под воздействием случайных факторов. Случайными могут быть не только нагрузки механизмов, но и продолжительность цикла и частота включения.
Если влияние случайных факторов велико, то строят нагрузочные диаграммы для наиболее вероятного или наиболее тяжелого цикла.
Для
обоснованного выбора электродвигателя
скоростная и нагрузочная диаграммы
механизма должны быть известны или
рассчитаны. По нагрузочной диаграмме
механизма можно найти среднюю
 ,
или среднеквадратичную (эквивалентную)
,
или среднеквадратичную (эквивалентную)
 ,
мощности механизма, где
,
мощности механизма, где
![]() ,(7.63)
,(7.63)![]() момент
навыходном валу механизма.
момент
навыходном валу механизма.
Если
известно передаточное число j
между двигателем и механизмом, то можно
определить статический момент в
двигательном
![]() , (7.64) и тормозном
, (7.64) и тормозном
![]() ,
(7.65) режимах, а затем найти среднюю
,
(7.65) режимах, а затем найти среднюю
 ,
(7.66)или среднеквадратичную
,
(7.66)или среднеквадратичную
 статическую
мощность, где
статическую
мощность, где
![]() ,
(7.67)
,
(7.67)
![]() ,
(7.68)
,
(7.68)![]() ,
,
![]() -
КПД передачи, КЗ
– коэффициент загрузки передачи.
-
КПД передачи, КЗ
– коэффициент загрузки передачи.
По статической мощности Рс можно предварительно выбрать электродвигатель:
 (7.70)
(7.70)
![]() ,
(7.71)Кзап=1,1
– 1,3 – коэффициент запаса, учитывающий
влияние динамических режимов.
,
(7.71)Кзап=1,1
– 1,3 – коэффициент запаса, учитывающий
влияние динамических режимов.
При
неизвестном передаточном числе его
определяют по одному из критериев
оптимальности, для номинальной мощности
электродвигателя Рном,
которую в этом случае рассчитывают так:
![]() ,
(7.72)
,
(7.72)
Выбранная в соответствии с нагрузочной диаграммой механизма номинальная мощность электродвигателя является предварительной, так как при ее выборе не учитывались динамические моменты. Окончательная проверка электродвигателя по нагреву и перегрузочной способности возможна только после полного расчета переходных процессов электропривода за цикл работы.
Предварительной
проверка с помощью упрощенной нагрузочной
диаграммы электропривода, представляющей
собой зависимость электромагнитного
момента или тока электродвигателя за
цикл, т.е. М(t)
или I(t).
Электромагнитный момент двигателя
вычисляется по формуле
![]() ,
,
(7.73)где
![]() ,
(7.74)
,
(7.74)
![]() ,
J
– суммарный
,
J
– суммарный
момент
инерции электропривода, приведенный к
валу электродвигателя, ![]() - конечная и
- конечная и
начальная угловые скорости двигателя на временном интервале tп.п переходного процесса, m –
 поступательно
перемещающаяся масса с линейной скоростью
, Jм
– момент инерции механизма, j
– передаточное число,
поступательно
перемещающаяся масса с линейной скоростью
, Jм
– момент инерции механизма, j
– передаточное число, ![]() - радиус приведения. Знак динамического
момента определяется ускорением: при
разгоне
- радиус приведения. Знак динамического
момента определяется ускорением: при
разгоне
![]() и
и
![]() ,
а при торможении
,
а при торможении
![]() и
и
![]() .
Величина углового ускорения
.
Величина углового ускорения
![]() на валу электродвигателя вычисляется,
исходя из заданной величины углового
на валу электродвигателя вычисляется,
исходя из заданной величины углового
![]() или линейного
или линейного
![]() ускорения механизма
ускорения механизма
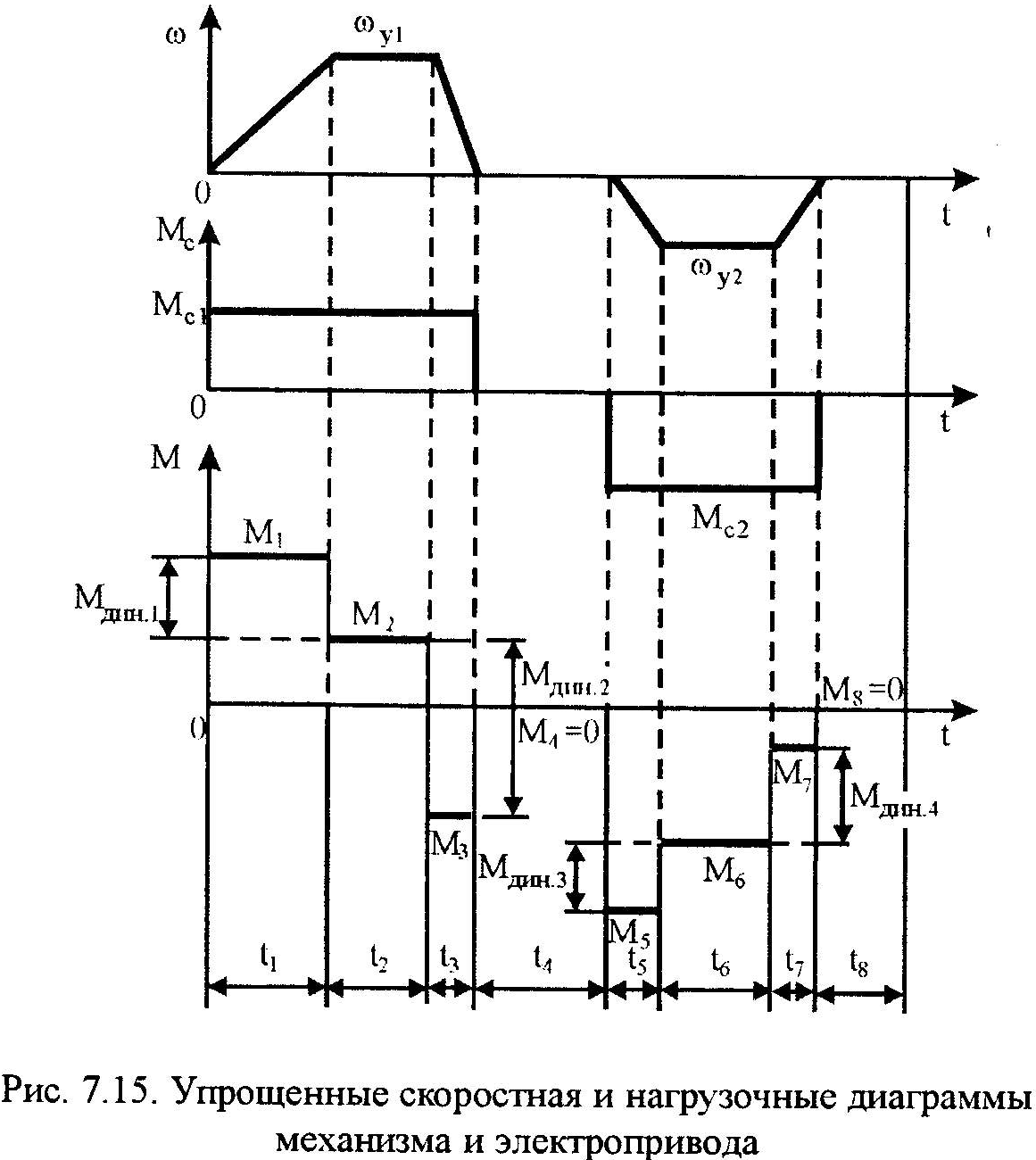
 (7.76) На Рис. 7.15 показано построение
упрощенной нагрузочной диаграммы
электропривода.
(7.76) На Рис. 7.15 показано построение
упрощенной нагрузочной диаграммы
электропривода.
Построенная
указанным способом упрощенная нагрузочная
диаграмма электропривода позволяет
провести предварительную проверку
двигателя по нагреву, принимая во
внимание следующие соображения. Если
выбранный электродвигатель в системе
электропривода работает при примерно
постоянном магнитном потоке (ДПТ НВ, АД
до критического скольжения, АД при
частотном регулировании по закону
Ф=const),
то среднеквадратичный момент
электродвигателя отражает его среднюю
температуру нагрева. Далее если tц>10мин,
то в соответствии с характеристикой
номинальных режимов это будет длительный
режим работы с переменной нагрузкой
(S6,
S7,
S8).
Поэтому можно найти среднеквадратичный
(эквивалентный) момент электродвигателя
за время цикла tц:![]() ,
где Мi
– электромагнитный момент двигателя
на i-м
участке упрощенной нагрузочной диаграммы
электропривода,
,
где Мi
– электромагнитный момент двигателя
на i-м
участке упрощенной нагрузочной диаграммы
электропривода, ![]() - коэффициент охлаждения самовентилируемого
двигателя на i-м
участке, ti
– временной интервал i-го
участка.
- коэффициент охлаждения самовентилируемого
двигателя на i-м
участке, ti
– временной интервал i-го
участка.
Предварительно
выбранный электродвигатель будет
удовлетворять условиям нагрева, если
![]() ,
где
,
где ![]() - номинальные мощность и угловая скорость
двигателя.
- номинальные мощность и угловая скорость
двигателя.
Если
же двигатель работает с переменным
магнитным потоком в прежнем режиме ,то
момент электродвигателя уже не отражает
его нагрев. Поэтому упрощенную нагрузочную
диаграмму М(t)
надо пересчитать в упрощенную нагрузочную
диаграмму тока электродвигателя I(t).
Затем по ней рассчитать эквивалентный
ток Iэ
за время tц:![]() ,
(7.79) и сравнить с номинальным током
Iном.
,
(7.79) и сравнить с номинальным током
Iном.
Если
![]() ,
(7.80) то выбранный двигатель удовлетворяет
условиям нагрева.
,
(7.80) то выбранный двигатель удовлетворяет
условиям нагрева.
При
tц10мин
имеем один из повторно-кратковременных
режимов (S3,
S4,
S5),
для которых эквивалентный момент
![]() или эквивалентный ток
или эквивалентный ток
![]() рассчитываются только для включенного
(рабочего) состояния двигателя при
известной относительной продолжительности
включения
рассчитываются только для включенного
(рабочего) состояния двигателя при
известной относительной продолжительности
включения
![]() .
.
Если
расчетная величина
(или ПВ) отличается от стандартного, то
эквивалентные момент и ток приводят к
стандартному значению ПВ:![]() ,
(7.81)
,
(7.81)
![]() ,Двигатель
по нагреву проходит, если выполняется
условие
,Двигатель
по нагреву проходит, если выполняется
условие
![]() , (7.83)
или
, (7.83)
или
![]() ,
Упрощенная нагрузочная диаграмма
электропривода позволяет также проверить
двигатель и по перегрузочной способности.
Электродвигатель будет удовлетворять
условиям перегрузки, если
,
Упрощенная нагрузочная диаграмма
электропривода позволяет также проверить
двигатель и по перегрузочной способности.
Электродвигатель будет удовлетворять
условиям перегрузки, если
![]() ,(7.85)
где Мmax
– максимальный момент на нагрузочной
диаграмме электропривода
,(7.85)
где Мmax
– максимальный момент на нагрузочной
диаграмме электропривода