

6) Изменение матрицы линейного преобразования при изменении базиса
В предыдущем разделе мы установили, что как только в линейном пространстве выбран базис, то каждому линейному преобразованию соответствует матрица этого преобразования. Однако если выбрать в пространстве другой базис, то матрица преобразования, как правило, станет другой. Выясним, как эти матрицы связаны между собой.
Пусть ![]() --
-- ![]() -мерное
линейное пространство,
-мерное
линейное пространство, ![]() и
и ![]() --
два базиса в этом пространстве. Первый
из них назовем "старым", а второй --
"новым". Пусть
--
два базиса в этом пространстве. Первый
из них назовем "старым", а второй --
"новым". Пусть ![]() --
матрица перехода 19.1.4 а от старого базиса
к новому.
--
матрица перехода 19.1.4 а от старого базиса
к новому.
Предложение 19.1 Пусть ![]() --
линейное преобразование
пространства
,
--
линейное преобразование
пространства
, ![]() и
и ![]() --
матрицы этого преобразования в старом
и новом базисе соответственно. Тогда
--
матрицы этого преобразования в старом
и новом базисе соответственно. Тогда
![]()
Доказательство.
Пусть ![]() --
произвольный вектор пространства
,
--
произвольный вектор пространства
, ![]() --
его образ, то есть
--
его образ, то есть ![]() .
Пусть
.
Пусть ![]() и
и ![]() --
координатные столбцы векторов
и
в
старом базисе, а
--
координатные столбцы векторов
и
в
старом базисе, а ![]() ,
, ![]() --
в новом. Тогда в силу формулы (19.3)
--
в новом. Тогда в силу формулы (19.3) ![]() .
По предложению
18.5 имеем
.
По предложению
18.5 имеем ![]() ,
, ![]() .
Подставим эти выражения в предыдущую
формулу, получаем
.
Подставим эти выражения в предыдущую
формулу, получаем ![]() .
Откуда
.
Откуда ![]() .
С другой стороны, в силу формулы (19.3)
в новом базисе
.
С другой стороны, в силу формулы (19.3)
в новом базисе ![]() .
Сравнивая это равенство с предыдущим,
получаем
.
Сравнивая это равенство с предыдущим,
получаем ![]() .
.
Определение 19.2
Две квадратных матрицы ![]() и
и ![]() одного
порядка называются подобными,
если существует такая невырожденная
матрица
,
что
одного
порядка называются подобными,
если существует такая невырожденная
матрица
,
что ![]() .
.
Следствие 19.1 Матрицы одного линейного преобразования, соответствующие разным базисам, подобны друг другу, и наоборот, если матрицы подобны, то они являются матрицами одного и того же преобразования в разных базисах.
Определение и примеры
Рассмотрим
линейное пространство
и
преобразование
этого
пространства, то есть закон, по которому
каждому вектору
из
соответствует
вектор ![]() из
того же пространства. Вектор
называется образом
вектора
и
обозначается
из
того же пространства. Вектор
называется образом
вектора
и
обозначается ![]() ,
а вектор
называетсяпрообразом
вектора
.
,
а вектор
называетсяпрообразом
вектора
.
Определение 19.1 Преобразование линейного пространства называется линейным, если для любых векторов и и любого числа выполнены равенства
|
(19.1) |
то есть образ суммы векторов равен сумме образов слагаемых, образ вектора, умноженного на число, равен произведению этого числа на образ вектора.
Замечание 19.1 В этой главе с каждым линейным преобразованием будет связана матрица, которую мы будем обозначать той же буквой, что и само преобразование. Чтобы их различать, мы для букв, обозначающих преобразование, будем использовать так называемый "каллиграфический" шрифт.
Линейное преобразование пространства называют также линейным отображением из в или линейным оператором из в .
Исходя из равенств (19.1) легко проверить, что

то есть образ линейной комбинации векторов равен линейной комбинации их образов.
Рассмотрим несколько примеров линейных преобразований.
Пример 19.1
Пусть
--
двумерное векторное пространство, то
есть множество векторов плоскости.
Пусть ![]() .
Это преобразование действует так: каждый
вектор оно переводит в вектор такого
же направления, но в два раза большей
длины. Если считать, что все векторы
имеют начало в начале координат, то
преобразование
можно
представить как растяжение плоскости
в два раза (рис. 19.1).
.
Это преобразование действует так: каждый
вектор оно переводит в вектор такого
же направления, но в два раза большей
длины. Если считать, что все векторы
имеют начало в начале координат, то
преобразование
можно
представить как растяжение плоскости
в два раза (рис. 19.1).
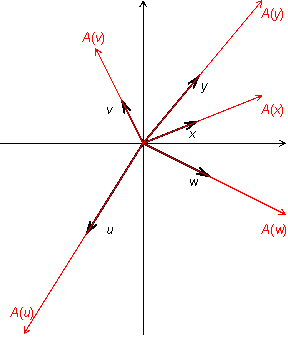
Рис.19.1.Преобразование растяжения
Проверим выполнение равенств (19.1)
![]()
![]()
Равенства (19.1) выполнены, следовательно, преобразование является линейным.
Пример 19.2
Пусть
--
двумерное векторное пространство,
--
поворот вектора по часовой стрелке на
угол ![]() (рис.
19.2).
(рис.
19.2).
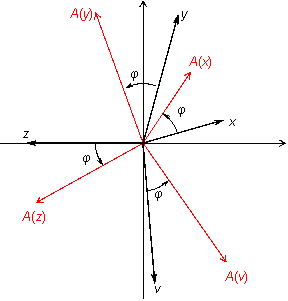
Рис.19.2.Преобразование поворота
Покажем, что это -- линейное преобразование.
Пусть
и
--
два вектора. Тогда ![]() --
это диагональ параллелограмма со
стронами
,
(рис.
19.3).
--
это диагональ параллелограмма со
стронами
,
(рис.
19.3).
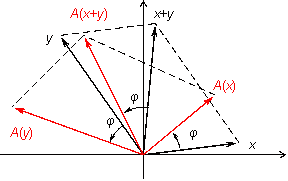
Рис.19.3.Образ суммы векторов
Если параллелограмм повернуть
как единое целое на угол
,
то его стороны станут векторами
и ![]() ,
диагональ будет вектором
,
диагональ будет вектором ![]() .
С другой стороны, диагональ тоже
повернулась на угол
и
поэтому является вектором
.
С другой стороны, диагональ тоже
повернулась на угол
и
поэтому является вектором ![]() .
Следовательно,
.
Следовательно, ![]() ,
первое из условий (19.1)
выполнено.
,
первое из условий (19.1)
выполнено.
Пусть
--
число. Из рисунка 19.4 очевидно, что ![]() .
.
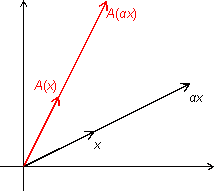
Рис.19.4.Образ вектора, умноженного на число
Следовательно, преобразование -- линейное.
Упражнение19.1.1. Пусть
--
двумерное векторное пространство, ![]() --
некоторая прямая, проходящая через
начало координат,
--
преобразование, переводящее каждый
вектор
в
вектор
симметричный
исходному относительно прямой
(рис.
19.5). Другими словами,
является
зеркальным отражением вектора
в
прямой
.
--
некоторая прямая, проходящая через
начало координат,
--
преобразование, переводящее каждый
вектор
в
вектор
симметричный
исходному относительно прямой
(рис.
19.5). Другими словами,
является
зеркальным отражением вектора
в
прямой
.
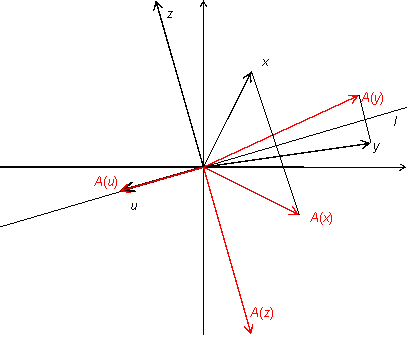
Рис.19.5.Преобразование отражения
Докажите, что является линейным преобразованием.
Упражнение19.1.2. Пусть -- двумерное векторное пространство, -- некоторая прямая, проходящая через начало координат, -- преобразование, переводящее каждый вектор в его проекцию на прямую (рис. 19.6).

Рис.19.6.Преобразование проектирования
Докажите, что является линейным преобразованием.
Пример 19.3
Пусть
--
пространство всех многочленов,
--
преобразование, которое переводит
вектор из
,
то есть многочлен, в производную этого
многочлена, которая естественно является
многочленом, то есть вектором из
.
Пусть ![]() ,
то есть
,
то есть ![]() .
Тогда
.
Тогда
![]()
Например, если ![]() ,
то
,
то ![]() .
Покажем, что преобразование
является
линейным.
.
Покажем, что преобразование
является
линейным.
Пусть ![]() ,
--
число. Тогда в силу свойства линейности
производной получим
,
--
число. Тогда в силу свойства линейности
производной получим
![]()
Аналогично,
![]()
Следовательно, -- линейное преобразование.
Пример 19.4
Пусть
--
-мерное
линейное пространство, Выберем в этом
пространстве базис ![]() .
Тогда у любого вектора
есть
его координатный столбец
.
Тогда у любого вектора
есть
его координатный столбец  .
Пусть
--
квадратная матрица порядка
.
Определим преобразование
следующим
образом:
.
Пусть
--
квадратная матрица порядка
.
Определим преобразование
следующим
образом: ![]() является
вектором, координатный столбец которого
равен
является
вектором, координатный столбец которого
равен ![]() (справа
стоит произведение матрицы
на
столбец
).
Покажем, что преобразование
--
линейное.
(справа
стоит произведение матрицы
на
столбец
).
Покажем, что преобразование
--
линейное.
Пусть и имеют координатные столбцы и соответственно, а их образы и -- координатные столбцы , и . Тогда
![]()
Но выражение в последнем
равенстве справа является координатным
столбцом образа суммы векторов
.
Следовательно, ![]() .
.
Пусть ![]() --
произвольное число. Тогда координатный
столбец вектора
--
произвольное число. Тогда координатный
столбец вектора ![]() равен
равен ![]() ,
координатный столбец образа вектора
,
координатный столбец образа вектора
![]()
то есть равен числу
,
умноженному на координатный столбец
образа вектора
.
Поэтому ![]() .
Тем самым мы доказали, что
преобразование
является
линейным.
.
Тем самым мы доказали, что
преобразование
является
линейным.
Очевидно, что примерами
линейных преобразований могут
служить тождественное
преобразование, то
есть преобразование, переводящее каждый
вектор в себя, ![]() ,
и нулевое
преобразование,
переводящее каждый вектор в нуль,
,
и нулевое
преобразование,
переводящее каждый вектор в нуль, ![]() .
.
Легко проверяется, что для
любого линейного преобразования
образ
нуля равен нулю, ![]() .
Действительно, в силу второго из
равенств (19.1)
.
Действительно, в силу второго из
равенств (19.1)
![]()
8) геометрический смысл определителя
Рассмотрим систему двух линейных уравнений с двумя неизвестными.
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
9)ортогональные матрицы
Ортогональная матрица
Ортогональная матрица — квадратная матрица A с вещественными элементами, результат умножения которой на AT равен единичной матрице:[1]
AAT = ATA = E,
или, что эквивалентно, её обратная матрица равна транспонированной матрице:
![]()
|
|
Свойства
Столбцы и строки ортогональной матрицы образуют системы ортонормированных векторов, то есть:
![]()
и
![]()
где
![]() ,
n — порядок матрицы, а δjk
— символ
Кронекера.
,
n — порядок матрицы, а δjk
— символ
Кронекера.
Другими словами, скалярное произведение строки на саму себя равно 1, а на любую другую строку — 0. Так же и для столбцов.
Определитель ортогональной матрицы равен
 ,
что следует из свойств определителей:
,
что следует из свойств определителей:
![]()
Множество ортогональных матриц порядка n над полем k образует группу по умножению, так называемую ортогональную группу которая обозначается On(k) или
 (если
k опускается, то предполагается
(если
k опускается, то предполагается
 ).
).Ортогональные матрицы соответствуют линейным операторам, переводящим ортонормированный базис линейного пространства в ортонормированный.
Любая вещественная ортогональная матрица подобна блочно-диагональной матрице с блоками вида
![]() и
и
![]()
Примеры
 —
единичная
матрица
—
единичная
матрица
 —
пример
матрицы
поворота
—
пример
матрицы
поворота
 —
пример
перестановочной
матрицы
—
пример
перестановочной
матрицы
Подобная матрица
Квадратные матрицы A и B одинакового порядка называются подобными, если существует невырожденная матрица P того же порядка, такая что:
![]()
Подобные матрицы получаются при задании одного и того же линейного преобразования матрицей в разных координатных системах; при этом матрица Р является матрицей перехода от одной системы к другой.
Если две матрицы подобны, то говорят, что одна из матриц может быть получена преобразованием подобия из другой. Если при этом одна из матриц диагональная, то про вторую матрицу говорят, что она может быть диагонализована.